

很久没更新自己的大专栏了,熟悉我博客的朋友应该知道如果写这个标题,就说明是挺认真写的~哈哈。
最近的工作也确实取得了很大的进展,进入了更困难的深水区
首先得感谢港科多位师兄师弟的帮助,尤其是本末提供的Diable刑天小车车,优秀的编码直驱电机的表现,轮足设计和棒棒的6DOF全能,很大程度的帮助了我们的工作!导致这一版几乎是为刑天量身订做的。。。其他底盘泛用性应该也是可以的。另外感谢某师兄企业优异的全局快门相机模组性能和沈老师VINS组过去这么多年的研究基础,这些事情对PR-MONO第一个正式版本的工程化工作产生了巨大的帮助。
今天这篇是看图说话,重点提出VIO与VSLAM应用和工程,以及实用性的一些基础评估方法,结合我们的工作,希望能对大家起到较大的帮助。工程化所有相关事项以前的文章都讲过,不赘述了。
设备长这个样:

接口嘛。。。反正你想得到的都有

除了有点丑,没什么大毛病
首先看一下室内的测试环境:

大概就这样,强光区很多,走廊都是弱纹理区。
评估VIO系统的核心指标有三项(分先后):开销,鲁棒性,精度
哪怕你的系统在EUROC或各种数据集上能跑到飞起!但是如果实际环境工作shi得一塌糊涂的话,那它对你个人来说还是个垃圾,因为你的系统最终适配的是你自己的算力平台与相机。
为什么我把精度放最后呢?从学术的角度看,最重要的当然是精度,但是实际如果开销的问题都解决不了,谈何鲁棒性?鲁棒性都没有(比如整天scale飘飞),那聊个毛的精度。怎么解决前2者确实很难我也谈过很多次了。从整个SLAM系统的角度来说,即使你VIO水平比较挫,也是完全可以用高精度RTK(没钱用个亚米级的low版RTK也行)来解决室外精度问题,室内可以用AI或者二维码来修正精度。其实就算我们这种整得很好的工程化VIO,在严肃场景(如电力/能源等行业)一样得耦合RTK,进一步控制鲁棒性也是建议耦合轮速计的。
先放室内:(1圈28米,10圈280米),这是简单场景评估,工作中存在1处强光照射,1块转弯区无纹理:
下面2张图大约时速<1.1米/秒,转弯比较柔和(约60°/S),要求同事们都静止了,环境不错,基本没干扰。
顺时针10圈,逆时针10圈:
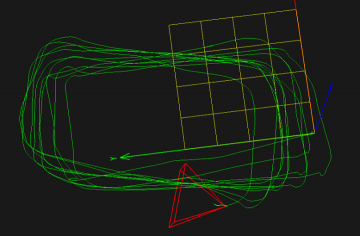
评估方法:10圈后计算和回环原点的直线绝对距离即可,方向可以靠估
注意,绿线仅仅是前端+后端优化的结果,这里是没有回环和轮速计耦合的,室内也没RTK。
结果:里程280米,顺时针偏差3.9米(1.4%),角度偏差6°左右,逆时针偏差2.8米(1%),角度偏差4°左右
不要问我为啥有差别。。。我手操的,我又不是机器。。。另外可能还有些玄学的成分吧。
好了,更精彩的部分来了
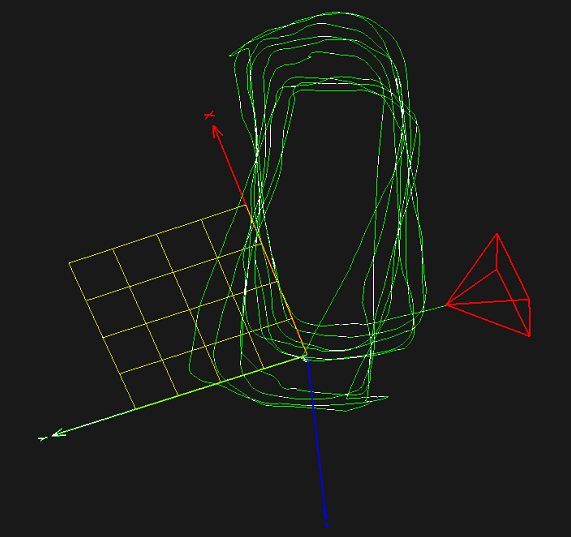
下图还是280米,时速直接干到1.6米,各个弯的转速激烈,最高超过120°/秒,正好午饭时间测试,大量同学在视线内反复通过(频繁的动态障碍物)!结合了大量工程/并行化和ZUPT的版本,在这次测试中升华了。
以下还是10圈优化的结果(结果没法看。。。)
最终误差超过了8米,每环精度差异也极大,优化的结果基本不可用了。
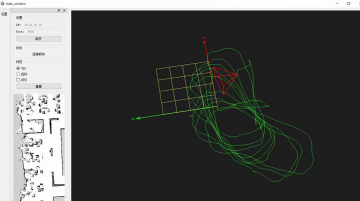
但是当ZUPT+回环全开时(上下2张图对应的是同一个测试)
就变成了下图这样:
这个误差有多低相信不言而喻一目了然了,有一些环环突出了一点是因为毕竟是我随意手控的嘛。。。有远有近,最终的误差抵达了不到0.6米!即0.22%这种精度,角度偏差1°。
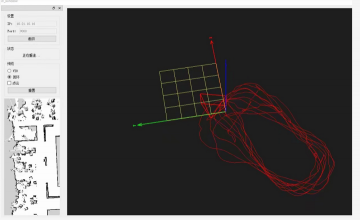
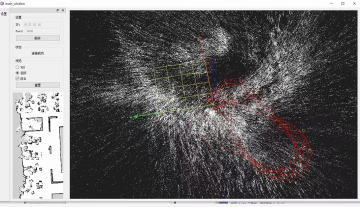
室内测试告一段落,最后放张难看的带稀疏点云的总图(没开视觉窗口),稀疏点云的缺点就是世界观奇烂:
后续我们的重点工作也是在现在的基础上建立世界观,只有这样,VIO相对RTK和激光雷达的劣势才会越来越小,优势才会越来越大。当前的能力在室内和半户外来说,其实已经可以取代很多种传感器了。
然后再放一下刑天在室外探索的记录了,下图大约30000平米:

画红线的长度大约500米,在一个阳光普照的大晴天试的(光度极高),因为这次主要是测性能,没有严格按照划定的路线跑,大量进行了草地的穿越,得益于刑天优异的性能,在草地漫游中剧烈的无规则振动中VIO一直保持了非常好的稳定性。
其实录了个7分钟的视频,但是不知道怎么上载就随便截下图吧
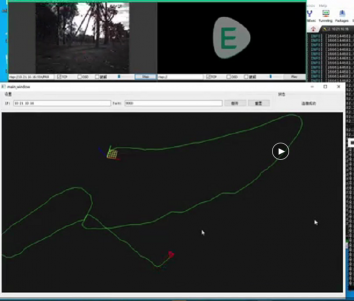
从左上视频可以看出行进路线在草丛中,从棋盘格的大小可以看出行进距离之远,左边的椭圆对应实景图中儿童活动区共160米的回环。其他就是在瞎跑了。。。这个全程户外800米的样子,刑天探索新世界。
测试并没有刻意取最好的结果,都是随便跑随便测的,我们在室内外都搭建了覆盖广阔的MESH网络,所以网络所有的包延时都大概在40ms以内,这个要注意,大家做同样测试的时候一定要注意网络还是得比较好。
从这些结果来看,懂行的同学可能会觉得那岂不是RTK得失业了?如果VIO建立了世界观,雷达也得失业了??!
其实哪有那么美好呢?现在虽然我们把VIO工程化又向前推进了几个大步。但是必须得说,高速场景即使建立了世界观VIO还是会被雷达秒杀,4自由度不可观的能观性问题依旧,初始化依然是很让人闹心的破事。很多能在机器人上完成的规定动作并不能用于汽车,同样,这类工程化很强的系统也不适用于VR等行业,即使建立了世界观也不适合具体的抓取等动作。但是我认为从未来的发展来看,它是有大量的用武之地的,尤其是在定建导环节来配合控制与规划,甚至可以作为很多设备的主传感器。



评论(0)
您还未登录,请登录后发表或查看评论