

ROS Navigation源代码剖析(1)-move_base 线程框架
Navigation是机器人最基本的功能之一,ROS为我们提供了一整套Navigation的解决方案,包括全局与局部的路径规划、代价地图、异常行为恢复、地图服务器等等,这些开源工具包极大地方便了移动机器人导航功能的开发和部署。
ROS的导航功能是如何实现的?如果想基于ROS开发自己的导航功能包应该如何做呢?
本系列文章会从源代码分析的角度深入剖析ROS Navigation功能包,来加深对ROS 导航的理解和认识。基于的ROS版本是 ROS kinetic,Global planner使用 global_planner/GlobalPlanner, Local planner使用 teb_local_planner/TebLocalPlannerROS
1 Github url
Ros 导航部分的代码可以从如下github下载
Github: https://github.com/ros-planning/navigation
2 目录结构
整个代码的目录结构如下图所示:

3 Move_base的线程stack
ROS Navigation框架的核心是move base进程,像全局与局部的路径规划、代价地图、异常行为恢复等功能都是通过move base进程在工作。所以我们的源代码剖析就从move base进程开始。
Move base进程启动之后,使用gdb可以查看整个进程的stack信息。通过stack信息可以便于我们从更高的层次理解它的软件架构。
3.1 线程stack信息
如下所示,move base启动之后,会有11个线程。红色部分标识出了每个线程的历程函数。通过这个历程函数就可以方便的找到对应的源代码。
Thread 11 (Thread 0x7f714fda8700 (LWP 4171)):
#0 0x00007f717d79830d in nanosleep () at ../sysdeps/unix/syscall-template.S:84
#1 0x00007f717e24896b in ros::ros_wallsleep(unsigned int, unsigned int) () from /opt/ros/kinetic/lib/librostime.so
#2 0x00007f717e24942e in ros::Duration::sleep() const () from /opt/ros/kinetic/lib/librostime.so
#3 0x00007f717e2483c0 in ros::Rate::sleep() () from /opt/ros/kinetic/lib/librostime.so
#4 0x00007f717d47412f in costmap_2d::Costmap2DROS::mapUpdateLoop(double) () from /opt/ros/kinetic/lib/libcostmap_2d.so
#5 0x00007f717bf375d5 in ?? () from /usr/lib/x86_64-linux-gnu/libboost_thread.so.1.58.0
#6 0x00007f717bd106ba in start_thread (arg=0x7f714fda8700) at pthread_create.c:333
#7 0x00007f717d7d341d in clone () at ../sysdeps/unix/sysv/linux/x86_64/clone.S:109
Thread 10 (Thread 0x7f716c898700 (LWP 3908)):
#0 0x00007f717d79830d in nanosleep () at ../sysdeps/unix/syscall-template.S:84
#1 0x00007f717e24896b in ros::ros_wallsleep(unsigned int, unsigned int) () from /opt/ros/kinetic/lib/librostime.so
#2 0x00007f717e24942e in ros::Duration::sleep() const () from /opt/ros/kinetic/lib/librostime.so
#3 0x00007f717e2483c0 in ros::Rate::sleep() () from /opt/ros/kinetic/lib/librostime.so
#4 0x00007f717d47412f in costmap_2d::Costmap2DROS::mapUpdateLoop(double) () from /opt/ros/kinetic/lib/libcostmap_2d.so
#5 0x00007f717bf375d5 in ?? () from /usr/lib/x86_64-linux-gnu/libboost_thread.so.1.58.0
#6 0x00007f717bd106ba in start_thread (arg=0x7f716c898700) at pthread_create.c:333
#7 0x00007f717d7d341d in clone () at ../sysdeps/unix/sysv/linux/x86_64/clone.S:109
Thread 9 (Thread 0x7f716d1dd700 (LWP 3762)):
#0pthread_cond_timedwait@@GLIBC_2.3.2 () at ../sysdeps/unix/sysv/linux/x86_64/pthread_cond_timedwait.S:225
#10x00007f717e5237ef in bool boost::condition_variable::timed_wait<boost::date_time::subsecond_duration<boost::posix_time::time_duration,1000l>>(boost::unique_lock<boost::mutex>&, boost::date_time::subsecond_duration<boost::posix_time::time_duration, 1000l> const&) ()
from /opt/ros/kinetic/lib/libroscpp.so
#20x00007f717e52438e in ros::TimerManager<ros::Time,ros::Duration, ros::TimerEvent>::threadFunc() ()
from /opt/ros/kinetic/lib/libroscpp.so
#3 0x00007f717bf375d5 in ?? () from /usr/lib/x86_64-linux-gnu/libboost_thread.so.1.58.0
#4 0x00007f717bd106ba in start_thread (arg=0x7f716d1dd700) at pthread_create.c:333
#5 0x00007f717d7d341d in clone () at ../sysdeps/unix/sysv/linux/x86_64/clone.S:109
Thread 8 (Thread 0x7f716dffb700 (LWP 3015)):
#0pthread_cond_wait@@GLIBC_2.3.2 () at ../sysdeps/unix/sysv/linux/x86_64/pthread_cond_wait.S:185
#10x00007f717ea89895 in move_base::MoveBase::planThread() () from /opt/ros/kinetic/lib/libmove_base.so
#2 0x00007f717bf375d5 in ?? () from /usr/lib/x86_64-linux-gnu/libboost_thread.so.1.58.0
#3 0x00007f717bd106ba in start_thread (arg=0x7f716dffb700) at pthread_create.c:333
#4 0x00007f717d7d341d in clone () at ../sysdeps/unix/sysv/linux/x86_64/clone.S:109
Thread 7 (Thread 0x7f716e7fc700 (LWP 2907)):
#0pthread_cond_timedwait@@GLIBC_2.3.2 () at ../sysdeps/unix/sysv/linux/x86_64/pthread_cond_timedwait.S:225
#10x00007f717eae3df9in actionlib::SimpleActionServer<move_base_msgs::MoveBaseAction_<std::allocator<void> > >::executeLoop() ()from /opt/ros/kinetic/lib/libmove_base.so
#2 0x00007f717bf375d5 in ?? () from /usr/lib/x86_64-linux-gnu/libboost_thread.so.1.58.0
#3 0x00007f717bd106ba in start_thread (arg=0x7f716e7fc700) at pthread_create.c:333
#4 0x00007f717d7d341d in clone () at ../sysdeps/unix/sysv/linux/x86_64/clone.S:109
Thread 6 (Thread 0x7f716effd700 (LWP 2861)):
#0pthread_cond_timedwait@@GLIBC_2.3.2 () at ../sysdeps/unix/sysv/linux/x86_64/pthread_cond_timedwait.S:225
#1 0x00007f717e54b4f7 in ros::CallbackQueue::callAvailable(ros::WallDuration) () from /opt/ros/kinetic/lib/libroscpp.so
#2 0x00007f717b59bc42 in tf2_ros::TransformListener::dedicatedListenerThread() () from /opt/ros/kinetic/lib/libtf2_ros.so
#3 0x00007f717bf375d5 in ?? () from /usr/lib/x86_64-linux-gnu/libboost_thread.so.1.58.0
#4 0x00007f717bd106ba in start_thread (arg=0x7f716effd700) at pthread_create.c:333
#5 0x00007f717d7d341d in clone () at ../sysdeps/unix/sysv/linux/x86_64/clone.S:109
Thread 5 (Thread 0x7f716f7fe700 (LWP 2758)):
#0pthread_cond_timedwait@@GLIBC_2.3.2 () at ../sysdeps/unix/sysv/linux/x86_64/pthread_cond_timedwait.S:225
#10x00007f717e54b4f7 in ros::CallbackQueue::callAvailable(ros::WallDuration) () from /opt/ros/kinetic/lib/libroscpp.so
#20x00007f717e58c9a4 in ros::internalCallbackQueueThreadFunc() () from /opt/ros/kinetic/lib/libroscpp.so
#3 0x00007f717bf375d5 in ?? () from /usr/lib/x86_64-linux-gnu/libboost_thread.so.1.58.0
#4 0x00007f717bd106ba in start_thread (arg=0x7f716f7fe700) at pthread_create.c:333
#5 0x00007f717d7d341d in clone () at ../sysdeps/unix/sysv/linux/x86_64/clone.S:109
Thread 4 (Thread 0x7f716ffff700 (LWP 2682)):
#0pthread_cond_wait@@GLIBC_2.3.2 () at ../sysdeps/unix/sysv/linux/x86_64/pthread_cond_wait.S:185
#10x00007f717e588db3 in ros::ROSOutAppender::logThread() () from /opt/ros/kinetic/lib/libroscpp.so
#2 0x00007f717bf375d5 in ?? () from /usr/lib/x86_64-linux-gnu/libboost_thread.so.1.58.0
#3 0x00007f717bd106ba in start_thread (arg=0x7f716ffff700) at pthread_create.c:333
#4 0x00007f717d7d341d in clone () at ../sysdeps/unix/sysv/linux/x86_64/clone.S:109
Thread 3 (Thread 0x7f7174d45700 (LWP 2681)):
#0 0x00007f717d7c774d in poll () at ../sysdeps/unix/syscall-template.S:84
#10x00007f717c58c8bc in XmlRpc::XmlRpcDispatch::work(double)() from /opt/ros/kinetic/lib/libxmlrpcpp.so
#20x00007f717e518fae in ros::XMLRPCManager::serverThreadFunc()() from /opt/ros/kinetic/lib/libroscpp.so
#3 0x00007f717bf375d5 in ?? () from /usr/lib/x86_64-linux-gnu/libboost_thread.so.1.58.0
#4 0x00007f717bd106ba in start_thread (arg=0x7f7174d45700) at pthread_create.c:333
#5 0x00007f717d7d341d in clone () at ../sysdeps/unix/sysv/linux/x86_64/clone.S:109
Thread 2 (Thread 0x7f7175546700 (LWP 2680)):
#0 0x00007f717d7d3a13 in epoll_wait () at ../sysdeps/unix/syscall-template.S:84
#1 0x00007f717e525a87 in ros::poll_sockets(int, pollfd*, unsigned long, int) () from /opt/ros/kinetic/lib/libroscpp.so
#2 0x00007f717e5af236 in ros::PollSet::update(int) () from /opt/ros/kinetic/lib/libroscpp.so
#30x00007f717e534ac5 ros::PollManager::threadFunc() () from /opt/ros/kinetic/lib/libroscpp.so
#4 0x00007f717bf375d5 in ?? () from /usr/lib/x86_64-linux-gnu/libboost_thread.so.1.58.0
#5 0x00007f717bd106ba in start_thread (arg=0x7f7175546700) at pthread_create.c:333
#6 0x00007f717d7d341d in clone () at ../sysdeps/unix/sysv/linux/x86_64/clone.S:109
Thread 1 (Thread 0x7f717eee9800 (LWP 2624)):
#0pthread_cond_timedwait@@GLIBC_2.3.2 () at ../sysdeps/unix/sysv/linux/x86_64/pthread_cond_timedwait.S:225
#1 0x00007f717e54b4f7 in ros::CallbackQueue::callAvailable(ros::WallDuration) () from /opt/ros/kinetic/lib/libroscpp.so
#2 0x00007f717e5a7e39 in ros::SingleThreadedSpinner::spin(ros::CallbackQueue*) () from /opt/ros/kinetic/lib/libroscpp.so
#3 0x00007f717e58ce9b in ros::spin() () from /opt/ros/kinetic/lib/libroscpp.so
#4 0x00000000004052b2 in main ()
3.2 每个线程的职责分析
每个线程的职责如下: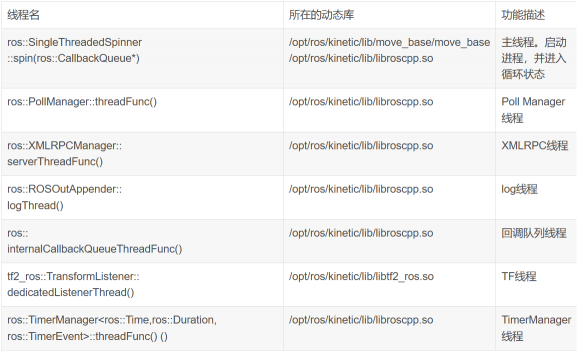
以上7个线程是ROS框架使用的线程,对所有的ROS node都一样。
下面开始就是move base自己的线程了。



评论(0)
您还未登录,请登录后发表或查看评论