

一、编译并运行imu_utils
1 安装依赖项
sudo apt-get install libdw-dev2 下载imu_utils和code_utils
imu_utils下载地址为:https://github.com/gaowenliang/imu_utils
code_utils下载地址为:https://github.com/gaowenliang/code_utils
注意:
1、全局安装ceres库,code_imu依赖ceres;
2、不要同时把imu_utils和code_utils一起放到src下进行编译。由于imu_utils依赖code_utils,所以先把code_utils放在工作空间的src下面,进行编译。然后再将imu_utils放到src下面,再编译。
2.1 code_utils编译
编译时出现的问题,解决如下:
2.1.1 CMakeLists.txt文件下
代码修改如下:
修改set(CMAKE_CXX_FLAGS "-std=c++11")为set(CMAKE_CXX_FLAGS "-std=c++14")2.1.2 sumpixel_test.cpp文件下
代码修改如下:
问题1:
修改#include "backward.hpp"为 #include “code_utils/backward.hpp”问题2:
修改:
添加头文件:#include"opencv2/imgcodecs/legacy/constants_c.h"问题3:
修改:
CV_MINMAX 改为 NORM_MINMAX2.1.3 mat_io_test.cpp文件下
代码修改如下:
问题:

opencv4.x以上,有些宏,API名字改了,需要改为新的:
CV_LOAD_IMAGE_UNCHANGED 改为 cv::IMREAD_UNCHANGED
CV_LOAD_IMAGE_GRAYSCALE 改为 cv::IMREAD_GRAYSCALE
CV_LOAD_IMAGE_COLOR 改为 cv::IMREAD_COLOR
CV_LOAD_IMAGE_ANYDEPTH 改为 cv::IMREAD_ANYDEPTH
修改:
CV_LOAD_IMAGE_UNCHANGED 改为 cv::IMREAD_UNCHANGED2.2 imu_utils编译
code_utils编译成功以后,再把imu_utils放到工作空间的src下面,进行编译
编译时出现的问题,解决如下:
2.2.1 CMakeLists.txt文件下
代码修改如下:
修改set(CMAKE_CXX_FLAGS "-std=c++11")为set(CMAKE_CXX_FLAGS "-std=c++14")2.2.2 imu_an.cpp文件下
代码修改如下:
问题:

修改:
添加头文件:#include <fstream>二、IMU数据采集
可以先在室内录制2小时imu数据(bag包格式),前提是全程保持imu静止不动,然后播放bag包用imu_utils来做离线标定
1 IMU型号
IMU 采用的WHEELTEC IMU N100

2 运行步骤
1.在运行程序之前,需要先在ubuntu系统下安装串口驱动。安装驱动的方法如下:新打开一个命
令窗口,输入以下命令即可。
sudo apt install ros-noetic-serial以上命令中的noetic是所装ROS的版本,如果所安装的ROS版本不是noetic,则需要把命令中的noetic改为自己装的ROS版本
2.连接硬件设备
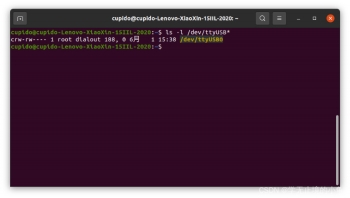
3.查找对应串口的标号,在命令窗口输入以下命令即可查找对应串口的标号。
ls -l /dev/ttyUSB* //查找串口标号输入后的结果如下图:
4.根据以上查找到的串口标号修改采集程序的配置文件。
在/home/cupido/imuread_ws/src/2.ROS_SDK/fdilink_ahrs_ROS1/fdilink_ahrs/launch中找到ahrs_data.launch打开该文件,如下图所示:
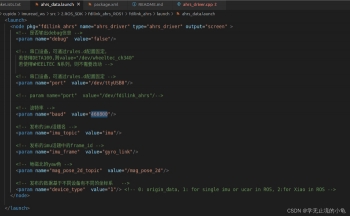
可以根据上面查到的串口标号修改上图对应的launch文件的串口配置参数,即添加:
<param name="port" value="/dev/ttyUSB0"/>5.运行采集程序
只需在命令窗口运行以下命令即可完成数据读取。
在根目录下:
首先运行打开串口权限,运行以下命令即可:
sudo chmod 666 /dev/ttyUSB* // 若硬件设备断电,则需要重新运行该命令
然后编译串口程序:
catkin_make
接着运行 source 命令:
source devel/setup.bash
然后运行采集程序:
roslaunch fdilink_ahrs ahrs_data.launch此时就会发布以下几个话题:
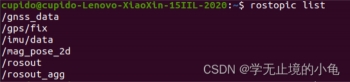
通过指令查看IMU数据:
在终端输入以下指令:
rostopic echo /imu/dataIMU输出数据如下:

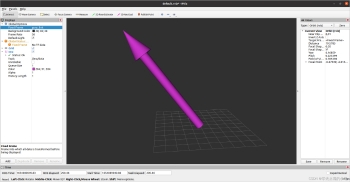
借助rviz将IMU可视化:
ADD话题,增加imu信息;参照配置文件,修改坐标系换成gyro_link。rviz效果如下:
如果无法输出数据,查看波特率是否太高了,这里为改成:921600 / 2 = 460800
最后保存数据,指令如下:
// 指定话题 将要录制的bag的文件名
rosbag record /imu/data -O imu.bag // 让IMU静止不动两个小时,录制IMU的bag最好是IMU上电10分钟之后在开始录制,上电瞬间开始录制会有较大误差。
终端显示如下:

查看文件夹,会看到imu.bag.active这个文件,就是正在录制的bag,静止不动,录制两个小时以上,录制完毕后Ctrl+C停止即可。此时,会有imu.bag文件,就是录制好的bag文件。
参考大佬:SLAM硬件搭建(激光雷达+IMU+相机+移动底盘)、https://gitee.com/xfbug/fdilink_ros_demo
三、播放bag文件,进行离线标定IMU(使用imu_utils计算allan方差)
IMU需要标定的参数主要是确定性误差(系统误差)和随机误差。误差和分析
确定性误差主要标定bias(零偏误差),scale(刻度系数误差,标度因数)和misalignment(安装误差,小量);
随机误差主要标定bias instability(零偏不稳定性误差:会使陀螺仪和加速度计的零偏随时间慢慢变化,逐渐偏离开机时校准的零偏误差,同时还会造成一部分随机行走误差的效果;另一种说法是它表示在一段时间内零偏bias的变化量)和random walk(陀螺仪与加速度计的随机游走误差,又叫:传感器的高斯白噪声,详细解释为:陀螺仪测量的角速度,加速度计测量的加速度的噪声是高斯白噪声)。
上面的说法可能不太准确,看下面:
【注】:
1、一般文献中的 IMU 随机误差模型是高斯白噪声和维纳过程的叠加,IMU 的随机误差的参数可以通过艾伦方法测量。在卡尔曼滤波器中,我们需要使用 IMU 的误差模型来计算状态变量的方差随时间的变化。
2、下面第3点,归为随机误差里的bias,另外还有random walk,这是两类噪声。
3、针对零偏bias(又称:零偏的重复性),每次IMU上电会产生较大的误差,这个一般在自己的代码中,用融合的方法(在滤波或者融合的过程中)去实时的估这个bias值。另外需要额外指出的是:此时的总bias = 零偏重复性产生的 bias值+ bias instability(零偏不稳定性误差,不确定性零偏)。
【后注】:
1、针对确定性误差(bias(零偏误差),scale(刻度系数误差,标度因数)和misalignment(安装误差,小量)),在陀螺出厂前会进行调零操作,避免陀螺输出参数存在此误差对后续算法精度产生影响。
2、理论上,采数据时的陀螺只存在bias instability(零偏不稳定性误差,不确定性零偏)和 random walk(陀螺仪与加速度计的随机游走误差),这两个参数在组合导航中都是要实时估计的。
参考大佬:
1、4.1 IMU误差模型
2、VIO标定IMU随机误差:Allan方差法
3、IMU标定(二)随机误差的标定
4、IMU标定(三)确定误差的标定
1 修改配置文件
进入之前编译好的imu_utils文件夹下fdilink.launch文件(自己添加的)查看相关设置:
<launch>
<node pkg="imu_utils" type="imu_an" name="imu_an" output="screen">
<param name="imu_topic" type="string" value= "/imu/data"/> <!--IMU话题名-->
<param name="imu_name" type="string" value= "fdilink"/> <!--相应名字-->
<param name="data_save_path" type="string" value= "$(find imu_utils)/data/fdilink/"/> <!--存放数据的文件路径可以根据自己需要修改-->
<param name="max_time_min" type="int" value= "120"/> <!--标定的时长 120为120min-->
<param name="max_cluster" type="int" value= "100"/>
</node>
</launch>这里有一个max_time_min表示使用bag数据的最大时长,单位是分钟,默认是120分钟,程序会在最大时间截断读取数据。
2 标定过程
在标定文件根目录下,依次输入以下指令:
catkin_make
source devel/setup.bash
roslaunch imu_utils fdilink.launch之后,在所录制的IMU数据集bag包目录下,播放录制好的IMU的bag包:
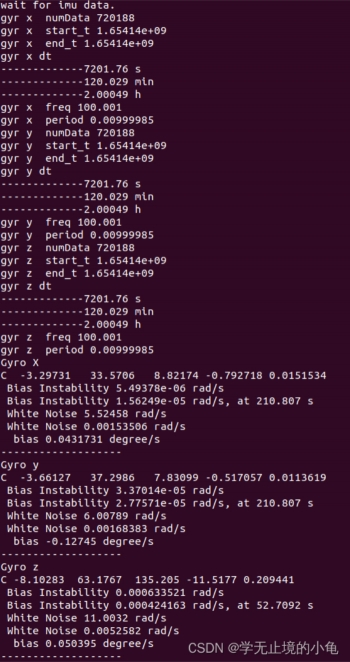
rosbag play -r 200 imu.bag // 200 倍速播放rosbag程序进入bag读取,并计算allan方。当bag包加速回放完毕后,执行launch的窗口仍然会显示wait for imu data.,等待一段时间计算,计算完毕后会显示计算结果。
标定过程图片如下:
陀螺仪:
加速度计:

数据包播放结束之后,在/home/cupido/imu_ws/src/imu_utils/data/fdilink/(这是我修改后的文件路径)这个文件夹下会出现一系列的参数文件,如下图所示:

打开fdilink_imu_param.yaml这个文件,会看到计算出来的噪声和随机游走的系数值,如下所示:
%YAML:1.0
---
type: IMU
name: fdilink
Gyr:
unit: " rad/s"
avg-axis:
gyr_n: 2.8226930135388296e-03 # 陀螺仪误差模型高斯白噪声
gyr_w: 1.5638351283029004e-04 # 陀螺仪bias
x-axis:
gyr_n: 1.5253117163846117e-03
gyr_w: 1.7174322527202657e-05
y-axis:
gyr_n: 1.6839509060303619e-03
gyr_w: 2.7759881586750127e-05
z-axis:
gyr_n: 5.2588164182015163e-03
gyr_w: 4.2421633437691737e-04
Acc:
unit: " m/s^2"
avg-axis:
acc_n: 1.1448093263922482e-02 # 加速度计误差模型高斯白噪声
acc_w: 4.0629665781519094e-04 # 加速度计bias
x-axis:
acc_n: 1.1073225312699064e-02
acc_w: 4.1640077903725196e-04
y-axis:
acc_n: 7.7222501823143138e-03
acc_w: 5.4834967948903443e-04
z-axis:
acc_n: 1.5548804296754069e-02
acc_w: 2.5413951491928631e-04至此,IMU的内参标定和记录结束。
参考大佬:
1、用imu_utils标定IMU,之后用于kalibr中相机和IMU的联合标定
2、VIO 中 IMU 的标定流程 (1/3) - imu_utils 使用备忘
3、使用imu_utils工具标定imu的内参
")


评论(0)
您还未登录,请登录后发表或查看评论