
上一篇,已经在Gazebo 9中放入了一个支持ROS 2的仿真机器人,具体参考:
使用机器人操作系统ROS 2和仿真软件Gazebo 9搭建机器人教程(一)
本篇,通过此案例学习并熟练掌握ROS2的如下内容:
- ROS2常用命令回顾
- 遥控机器人在环境中运动
- rqt和rviz2
- 摄像头图像显示和激光数据可视化
ROS2入门介绍参考:https://zhuanlan.zhihu.com/p/96940278
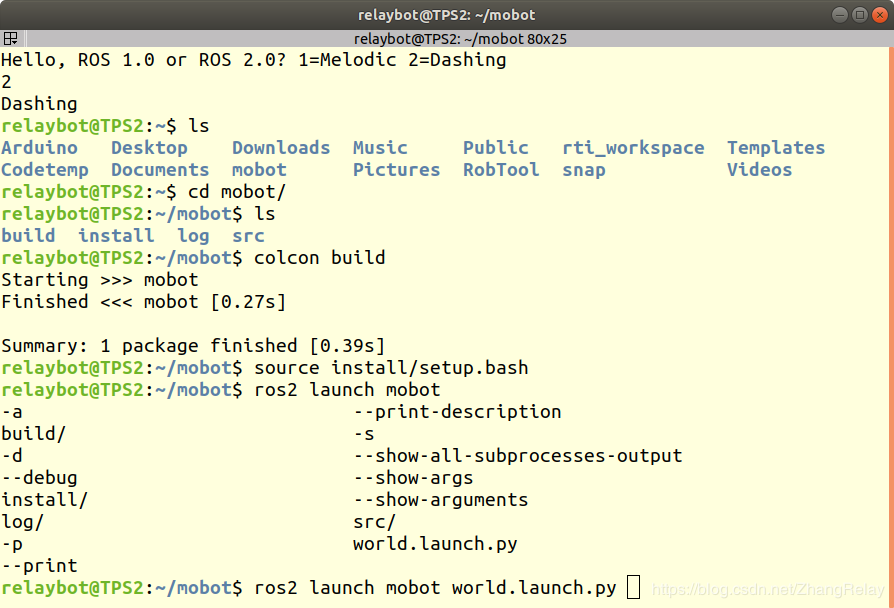
$ ros2 launch mobot world.launch.py
具体流程参考下图,配置不同会有路径和目录的差异:
节点
$ ros2 node
usage: ros2 node [-h]
Call `ros2 node <command> -h` for more detailed usage. ...Various node related sub-commands
optional arguments:
-h, --help show this help message and exitCommands:
info Output information about a node
list Output a list of available nodesCall `ros2 node <command> -h` for more detailed usage.
使用其中list:
$ ros2 node list
/launch_ros
/gazebo
/mobot/camera_controller
/mobot/gazebo_ros_head_hokuyo_controller
/mobot/skid_steer_drive_controller
第一个为ros接口,第二个为gazebo,第三到五个,为Gazebo插件的控制器对应摄像头、激光测距和运动驱动。
如果需要查看更具体的节点信息,如camera:
$ ros2 node info /mobot/camera_controller
/mobot/camera_controller
Subscribers:
/clock: rosgraph_msgs/msg/Clock
/mobot/parameter_events: rcl_interfaces/msg/ParameterEvent
Publishers:
/mobot/camera/image: sensor_msgs/msg/Image
/mobot/camera/image/camera_info: sensor_msgs/msg/CameraInfo
/mobot/parameter_events: rcl_interfaces/msg/ParameterEvent
/mobot/rosout: rcl_interfaces/msg/Log
Services:
/mobot/camera_controller/describe_parameters: rcl_interfaces/srv/DescribeParameters
/mobot/camera_controller/get_parameter_types: rcl_interfaces/srv/GetParameterTypes
/mobot/camera_controller/get_parameters: rcl_interfaces/srv/GetParameters
/mobot/camera_controller/list_parameters: rcl_interfaces/srv/ListParameters
/mobot/camera_controller/set_parameters: rcl_interfaces/srv/SetParameters
/mobot/camera_controller/set_parameters_atomically: rcl_interfaces/srv/SetParametersAtomically
/mobot/set_camera_info: sensor_msgs/srv/SetCameraInfo
此处需要注意,Dashing和Eloquent信息有一些的差异哦!
如果使用是Eloquent,如下:
$ ros2 node info /mobot/camera_controller
/mobot/camera_controller
Subscribers:
/clock: rosgraph_msgs/msg/Clock
/mobot/parameter_events: rcl_interfaces/msg/ParameterEvent
Publishers:
/mobot/camera/image: sensor_msgs/msg/Image
/mobot/camera/image/camera_info: sensor_msgs/msg/CameraInfo
/mobot/parameter_events: rcl_interfaces/msg/ParameterEvent
/mobot/rosout: rcl_interfaces/msg/Log
Service Servers:
/mobot/camera_controller/describe_parameters: rcl_interfaces/srv/DescribeParameters
/mobot/camera_controller/get_parameter_types: rcl_interfaces/srv/GetParameterTypes
/mobot/camera_controller/get_parameters: rcl_interfaces/srv/GetParameters
/mobot/camera_controller/list_parameters: rcl_interfaces/srv/ListParameters
/mobot/camera_controller/set_parameters: rcl_interfaces/srv/SetParameters
/mobot/camera_controller/set_parameters_atomically: rcl_interfaces/srv/SetParametersAtomically
/mobot/set_camera_info: sensor_msgs/srv/SetCameraInfo
Service Clients:Action Servers:
Action Clients:
如上所见,该节点正在发布、订阅和由该节点提供的服务以及该节点充当客户端的服务的所有主题都会列出。
主题
$ ros2 topic
usage: ros2 topic [-h] [--include-hidden-topics]
Call `ros2 topic <command> -h` for more detailed usage. ...Various topic related sub-commands
optional arguments:
-h, --help show this help message and exit
--include-hidden-topics
Consider hidden topics as wellCommands:
bw Display bandwidth used by topic
delay Display delay of topic from timestamp in header
echo Output messages from a topic
find Output a list of available topics of a given type
hz Print the average publishing rate to screen
info Print information about a topic
list Output a list of available topics
pub Publish a message to a topic
type Print a topic's typeCall `ros2 topic <command> -h` for more detailed usage.
例如list:
$ ros2 topic list
/clock
/mobot/camera/image
/mobot/camera/image/camera_info
/mobot/cmd_vel
/mobot/odom
/mobot/parameter_events
/mobot/rosout
/mobot/scan
/parameter_events
/rosout
/tf
来看看图像数据和激光数据需要的带宽吧?
$ ros2 topic bw /mobot/camera/image
Subscribed to [/mobot/camera/image]
average: 27.89MB/s
mean: 1.92MB/s min: 1.92MB/s max: 1.92MB/s window: 12
average: 28.39MB/s
mean: 1.92MB/s min: 1.92MB/s max: 1.92MB/s window: 27
average: 25.82MB/s
mean: 1.92MB/s min: 1.92MB/s max: 1.92MB/s window: 38
average: 26.60MB/s
mean: 1.92MB/s min: 1.92MB/s max: 1.92MB/s window: 53
ros2 topic bw /mobot/scan
Subscribed to [/mobot/scan]
average: 169.85KB/s
mean: 5.83KB/s min: 5.83KB/s max: 5.83KB/s window: 29
average: 163.58KB/s
mean: 5.83KB/s min: 5.83KB/s max: 5.83KB/s window: 56
average: 163.45KB/s
mean: 5.83KB/s min: 5.83KB/s max: 5.83KB/s window: 84
average: 164.86KB/s
mean: 5.83KB/s min: 5.83KB/s max: 5.83KB/s window: 100
再比如:
$ ros2 topic info /mobot/cmd_vel
Type: geometry_msgs/msg/Twist
Publisher count: 0
Subscriber count: 1
如果发布消息告知机器人运动呢?
/mobot/skid_steer_drive_controller订阅/mobot/cmd_vel
目前,没有消息发布,使用teleop_twist_keyboard。
服务
此部分教程不涉及,后续补充^_^
- 基础知识参考:ROS 2 | 服务 -services-
参数
默认节点通过修改参数可提高通用性!
Dashing:
sudo apt install ros-dashing-teleop-twist-keyboard
Eloquent:
sudo apt install ros-eloquent-teleop-twist-keyboard
命令:
$ ros2 run teleop_twist_keyboard teleop_twist_keyboard --ros-args -r __ns:=/mobot
This node takes keypresses from the keyboard and publishes them
as Twist messages. It works best with a US keyboard layout.
---------------------------
Moving around:
u i o
j k l
m , .For Holonomic mode (strafing), hold down the shift key:
---------------------------
U I O
J K L
M < >t : up (+z)
b : down (-z)anything else : stop
q/z : increase/decrease max speeds by 10%
w/x : increase/decrease only linear speed by 10%
e/c : increase/decrease only angular speed by 10%CTRL-C to quit
currently: speed 0.5 turn 1.0
这部分和工具同步给出示例。
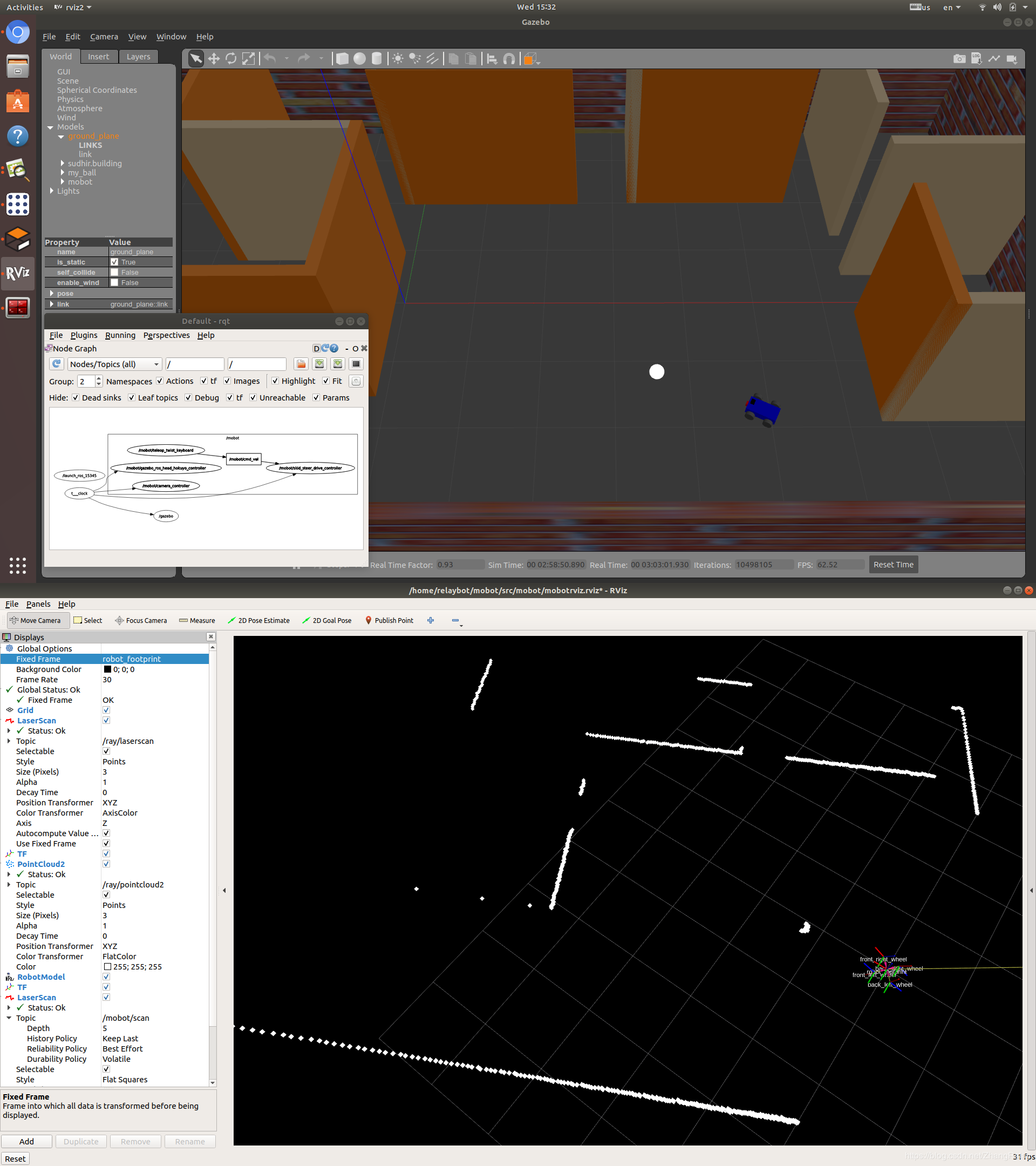
使用键盘可以控制机器人在环境中运动,观察rqt和rviz2的变化。
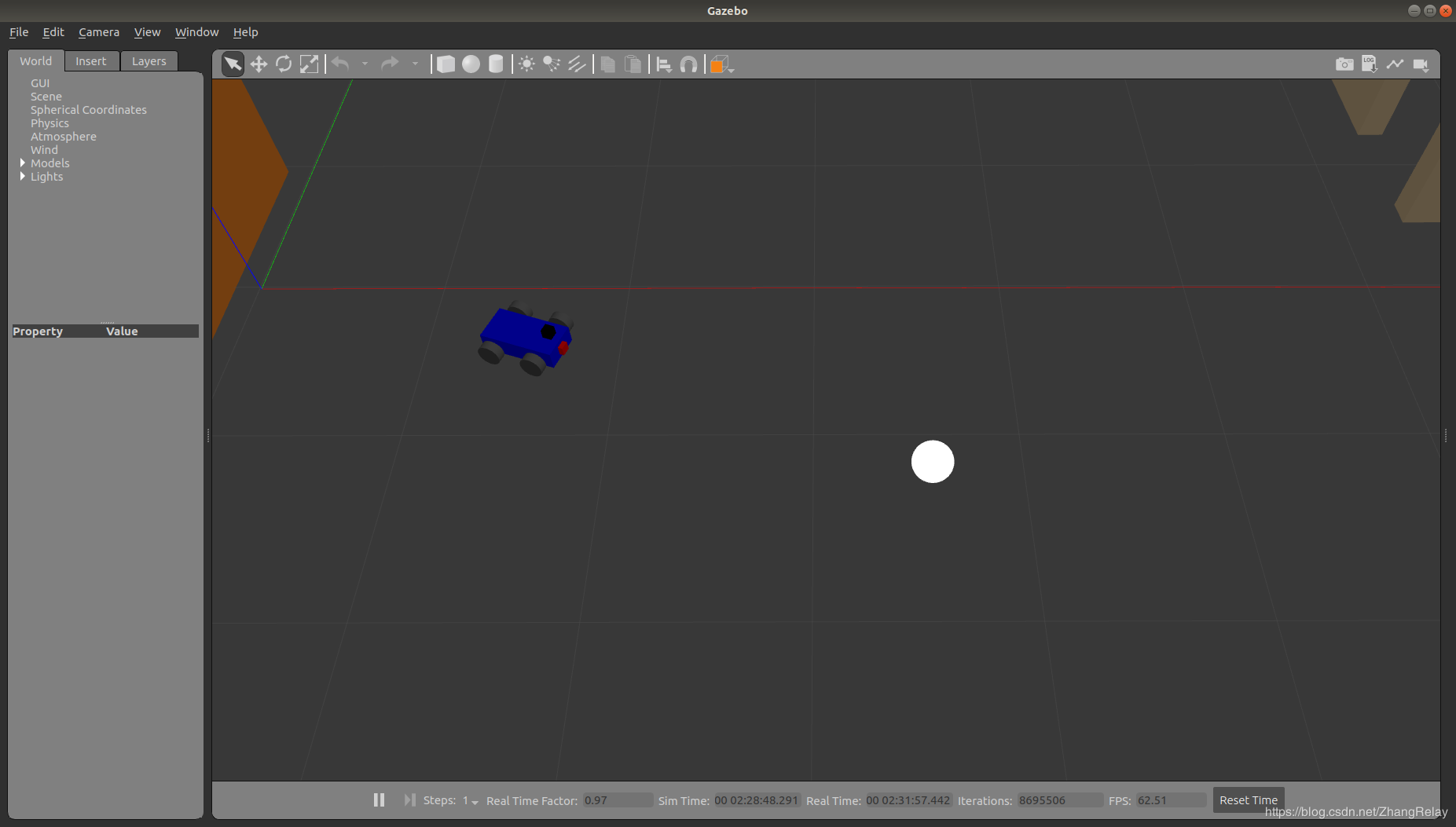
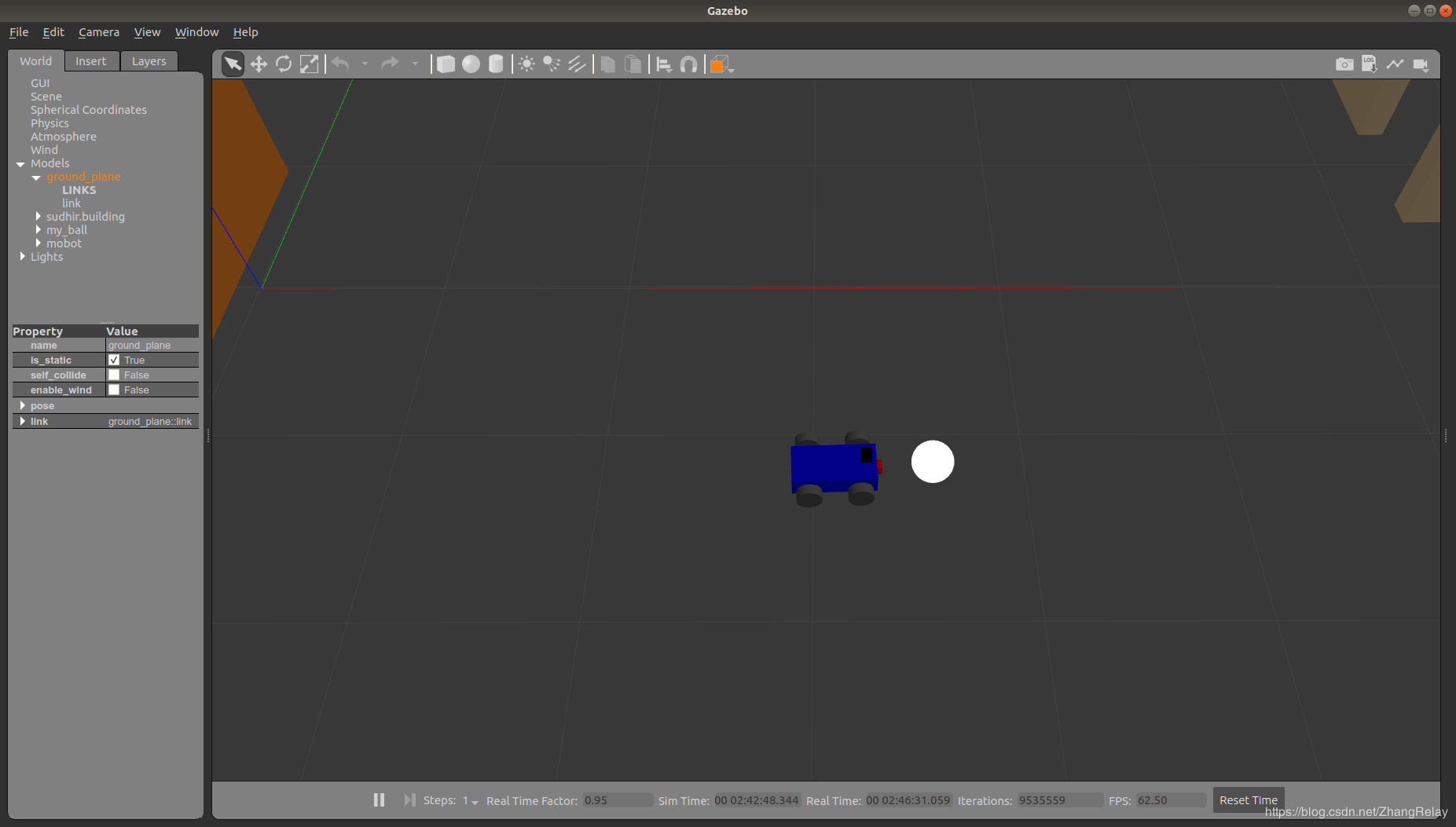
遥控靠近白色球体,转到工具章节。
行动
此部分教程不涉及,后续补充^_^
- 基础知识参考:ROS 2 | 行动 -actions-
启动
此部分教程不涉及,后续补充^_^
- 基础知识参考:ROS 2 | 启动 -launch-
工具
rqt和rviz2。

节点图
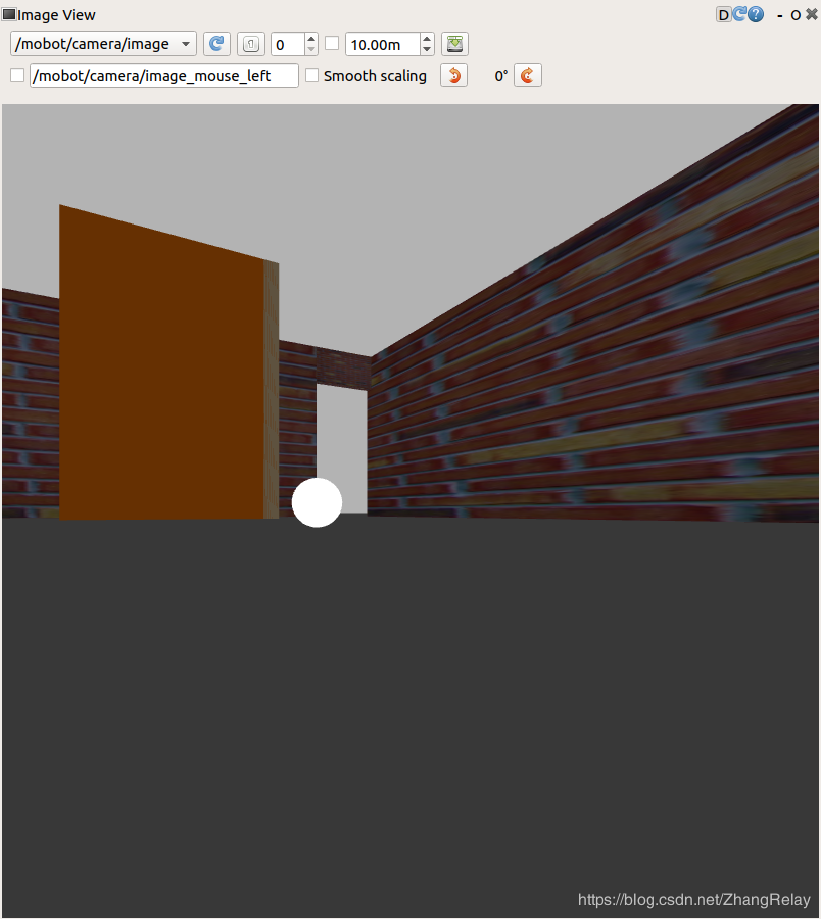
摄像头图像(Gazebo时间2:31:57)
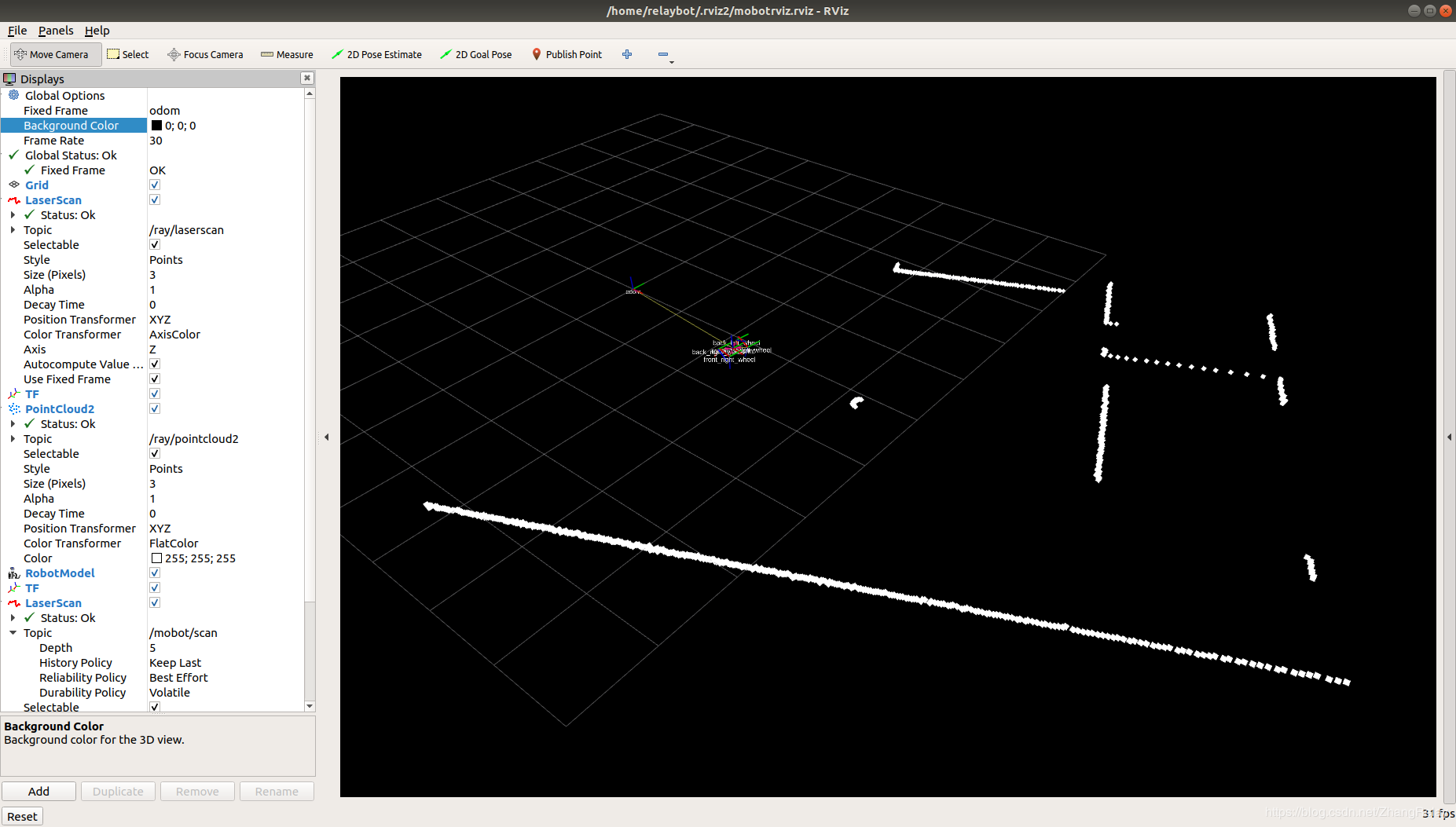
激光数据可视化(Gazebo时间2:31:57)
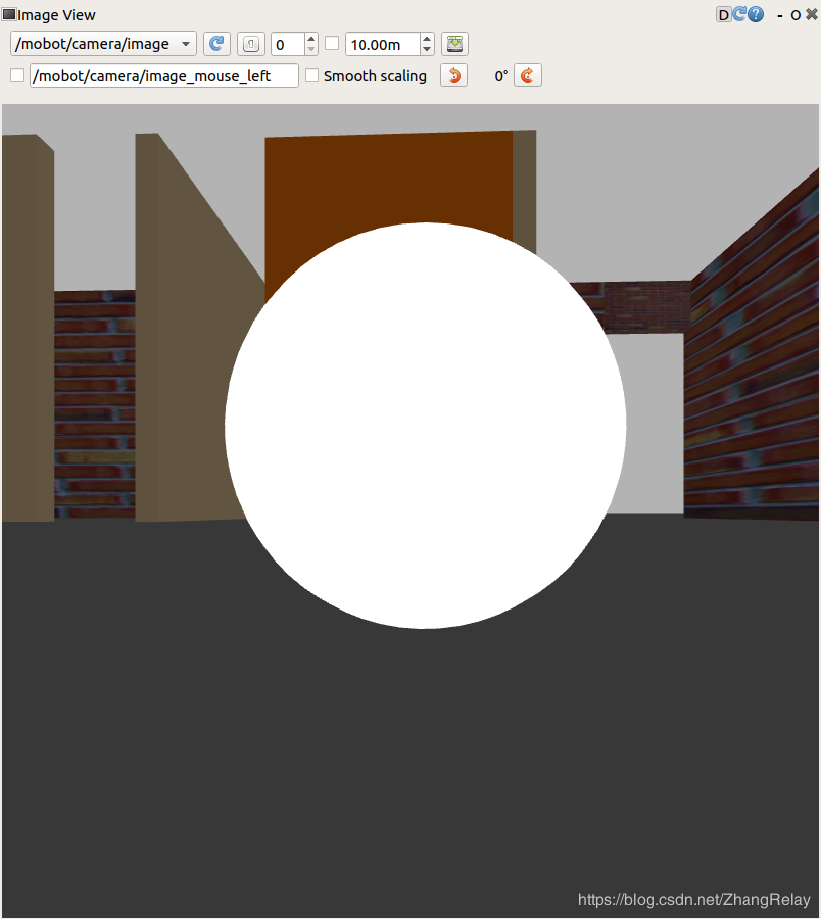
摄像头图像(Gazebo时间2:46:31)
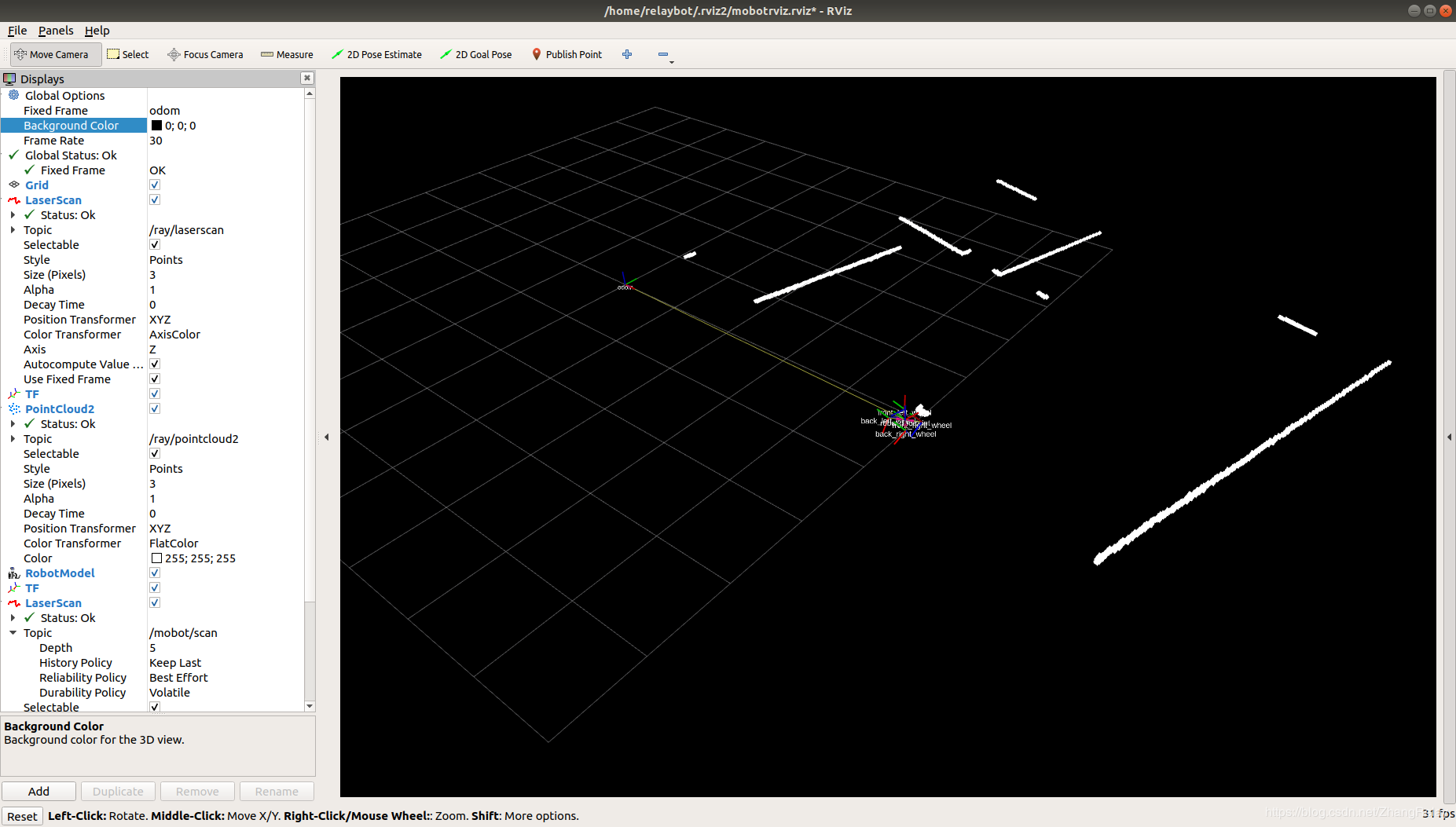
激光数据可视化(Gazebo时间2:46:31)
接下来,将会继续介绍使用C++节点编写程序处理激光和图像信息,自主驱动mobot。

评论(0)
您还未登录,请登录后发表或查看评论