

相机标定是用于获取相机畸变,内参数和外参数的一个操作,是机器视觉中不可或缺的一个重要步骤。
畸变是相机因其自身成像特性无法避免产生的图像变形。内参数是对相机内部特性的描述,包括相机图像中心、相机焦距等。外参数描述的是相机在世界坐标系上的位置和方向。
一、畸变系数
畸变可分为两种,分别是切向畸变和径向畸变。
径向畸变的产生是由于当光线在远离透镜中心时,其弯曲程度比靠近中心时更大,径向畸变有桶形畸变和枕形畸变两种,分别是下图中的第二张和第三张。

切向畸变是由于透镜与图像不完全平行而产生,如下图。
畸变系统不受相机拍摄的分辨率和其他因素影响,时相机本身的固有属性。根据OpenCV的文档,畸变可归纳如下,k1,k2,k3,k4,k5,k6径向畸变系数,p1,p2是切向畸变系数。
![]()
二、相机内参
相机内参与镜头本身的焦距等相关,为摄像机本身特性,可通过六个参数表示为:1/dx、1/dy、s、u0、v0、f。
dx和dy表示x方向和y方向的一个像素分别占多少长度单位,即一个像素代表的实际物理值的大小;u0,v0表示图像的中心像素坐标和图像原点像素坐标之间相差的横向和纵向像素数;f为焦距;s为坐标轴倾斜参数。
在opencv文档里内参数共四个为fx、fy、u0、v0。其中fx=f*(1/dx),fy=f*(1/dy),s假设为0,因此为4个内参
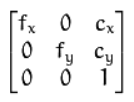
fx,fy为焦距,一般情况下,二者相等,cx、cy为主点坐标(相对于成像平面)。
焦距是光学系统中衡量光的聚集或发散的度量方式,指平行光入射时从透镜光心到光聚集之焦点的距离。亦是照相机中,从镜片中心到底片或CCD等成像平面的距离。具有短焦距的光学系统比长焦距的光学系统有更佳聚集光的能力。简单的说焦距是焦点到面镜的中心点之间的距离。
三、相机外参
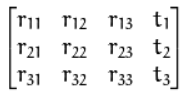
相机外参矩阵描述的是相机在静态场景下相机的运动,包括旋转和平移,或者在相机固定时,运动物体的刚性运动。
相机坐标系的三个轴的旋转参数分别为(ω、δ、 θ),然后把每个轴的3*3旋转矩阵进行组合(即先矩阵之间相乘),得到旋转矩阵R,其大小为3*3;T的三个轴的平移参数(Tx、Ty、Tz)。R、T组合成成的3*4的矩阵。
参考
https://blog.csdn.net/liulina603/article/details/52953414
https://blog.csdn.net/yangdashi888/article/details/51356385
https://docs.opencv.org/2.4/modules/calib3d/doc/camera_calibration_and_3d_reconstruction.html



评论(0)
您还未登录,请登录后发表或查看评论