
运行
roslaunch mbot_navigation nav_cloister_demo.launch
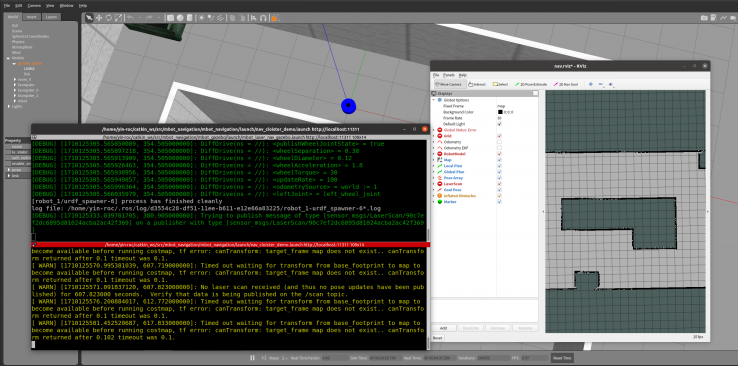
报错如下:
[ WARN] [1710125333.011436277, 380.872000000]: Timed out waiting for transform from base_footprint to map to become available before running costmap, tf error: canTransform: target_frame map does not exist.. canTransform returned after 380.872 timeout was 0.1.
[ WARN] [1710125333.011488663, 380.872000000]: No laser scan received (and thus no pose updates have been published) for 380.872000 seconds. Verify that data is being published on the /scan topic.
且rviz中不能显示机器人模型。




第三方账号登入
QQ 微博 微信