
ROS的开源功能包ar_track_alvar不仅可以识别二维码,还可以生成二维码,非常的方便且实用。
使用LIMO移动机器人识别二维码的效果如下图所示:
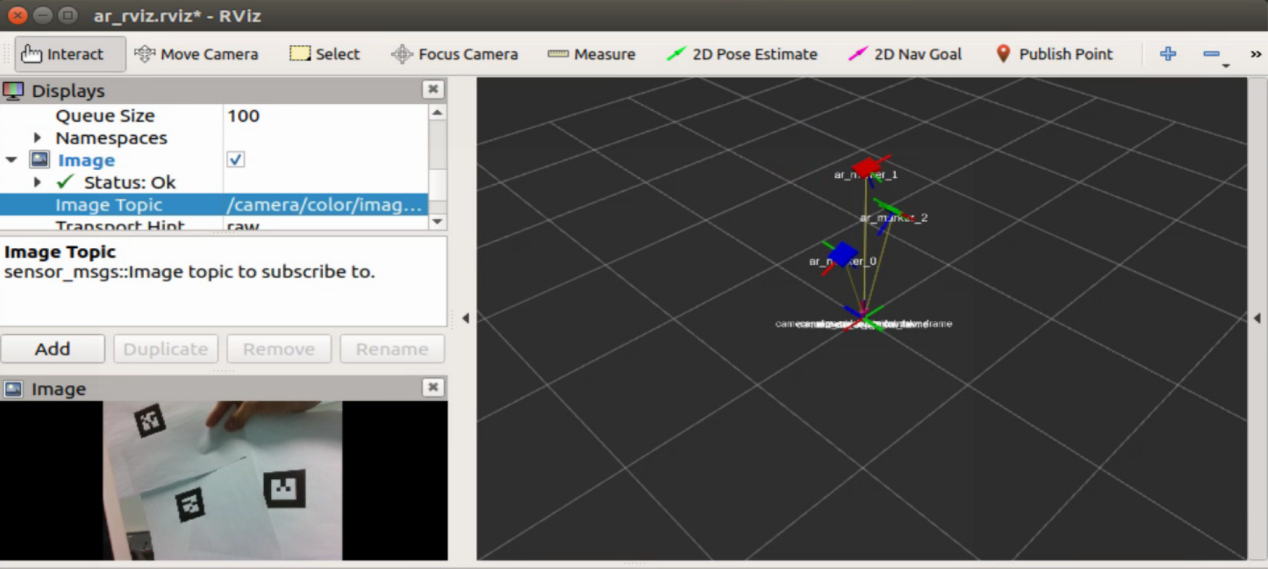
从上图可以看出,不仅能够获取二维码的位置信息,还可以获取二维码的坐标信息(可以知道角度),这样我们就可以利用二维码来修正移动机器人在行驶过程中的误差了。
ROS的开源功能包ar_track_alvar不仅可以识别二维码,还可以生成二维码,非常的方便且实用。
使用LIMO移动机器人识别二维码的效果如下图所示:
从上图可以看出,不仅能够获取二维码的位置信息,还可以获取二维码的坐标信息(可以知道角度),这样我们就可以利用二维码来修正移动机器人在行驶过程中的误差了。
您还未登录,请登录后发表或查看评论




第三方账号登入
QQ 微博 微信