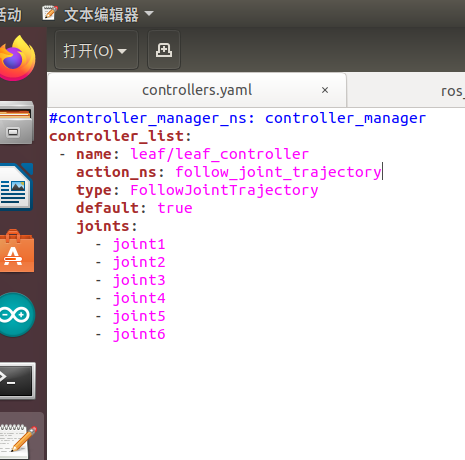
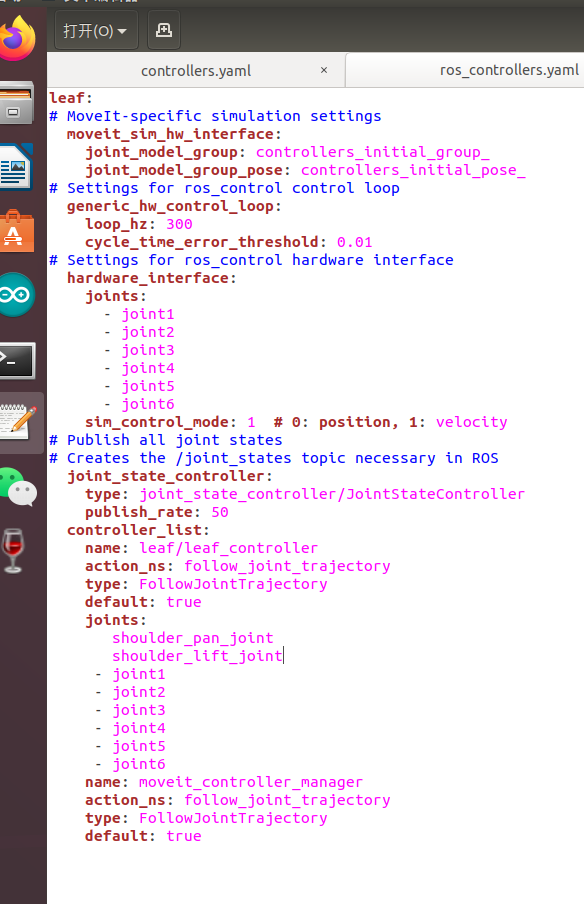
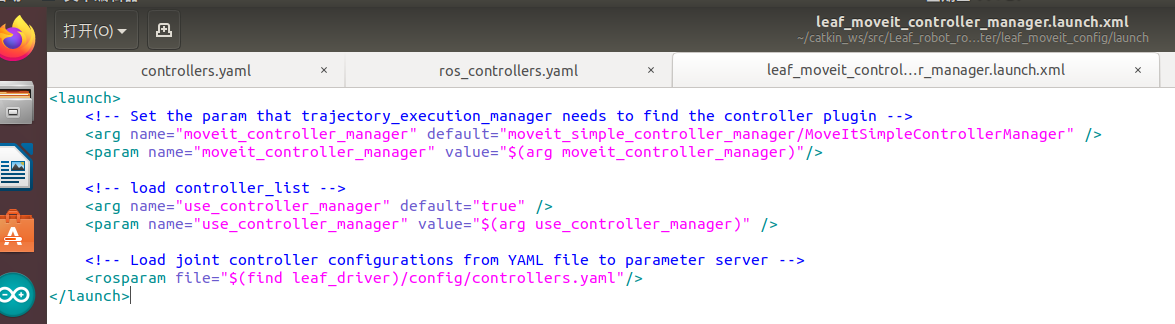
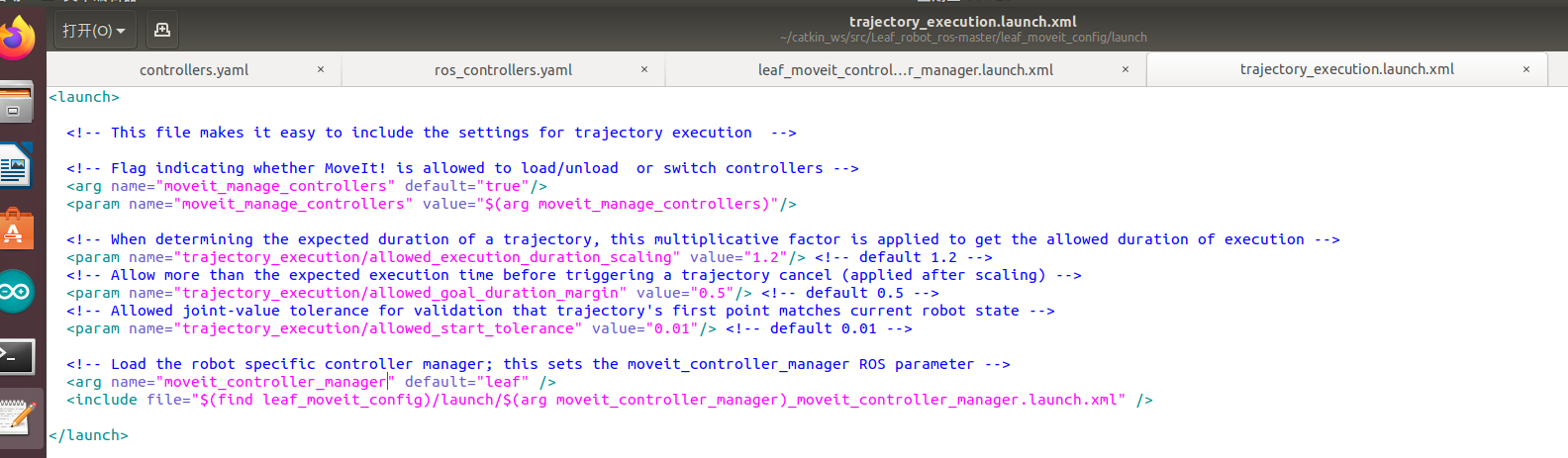
我用的是课件leaf的功能包,有些需要修改的都修改了,但是还是报错,连接不上机械臂,请问一下是什么问题,找不到修改的地方,是硬件的问题吗,我找不到arduino的ros底层代码
您还未登录,请登录后发表或查看评论
《如何基于MoveIt开发一款机械臂》课程答疑交流,课程链接:https://class.guyuehome.com/detail/p_5faa57f1e4b04db7c08da8f8/6
第三方账号登入
看不清?点击更换








第三方账号登入
QQ 微博 微信