
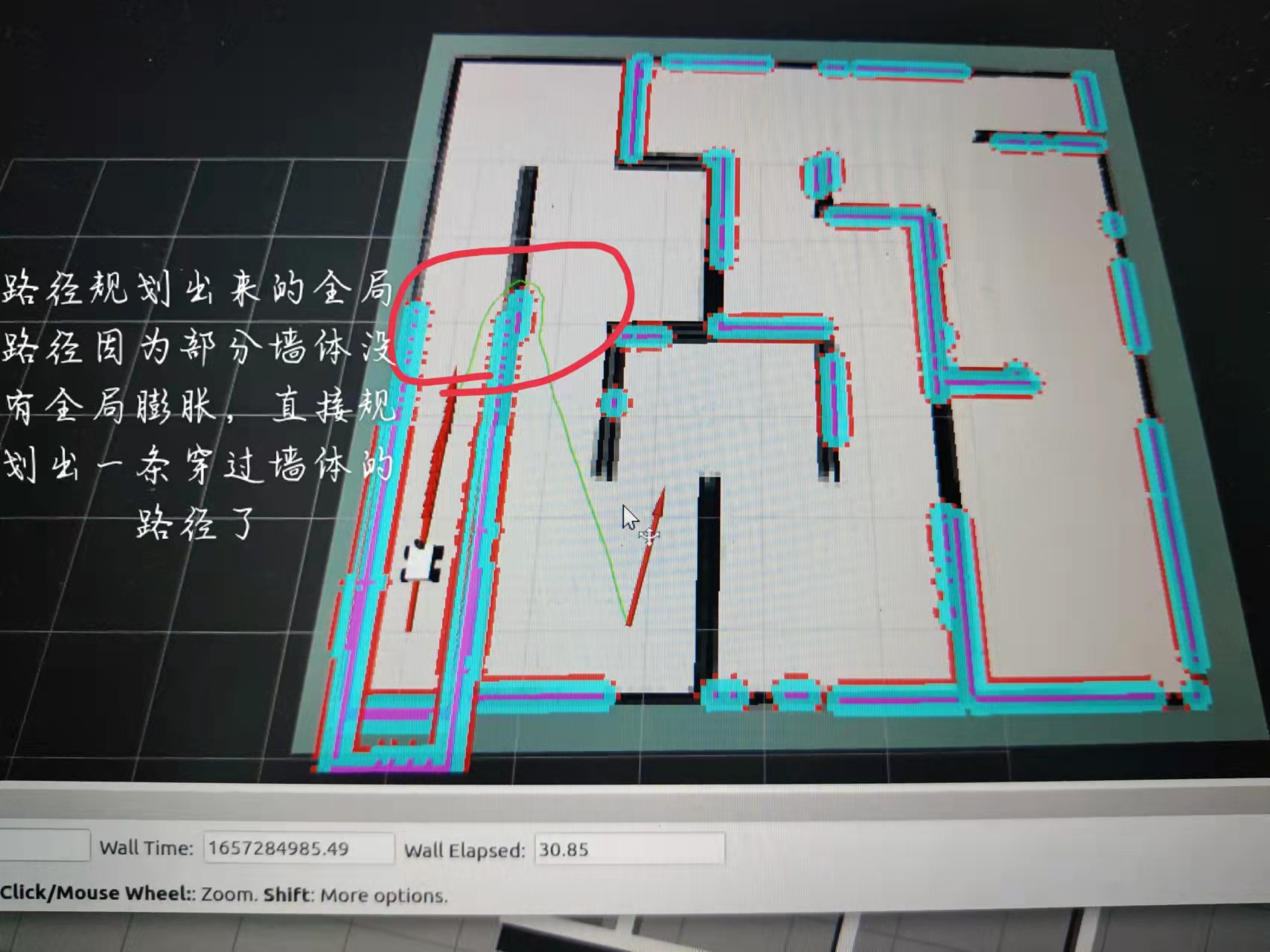
| 这里有个关于cartographer建出来的图的一些问题,就是我发现用cartographer建出来的图保存成为pbstream格式后,我把这个地图格式用在导航的时候会发现地图的全局代价地图只有部分会墙体会有代价,我用两个不同的仿真环境跑和用小车直接对场地进行建图来跑导航的时候,他们都会出现全局代价地图部分有部分没有,这个问题困扰了我们很久,一直没找到解决方法,难道做导航的时候就只能用amcl来定位了吗? | |
| 这里有个关于cartographer建出来的图的一些问题,就是我发现用cartographer建出来的图保存成为pbstream格式后,我把这个地图格式用在导航的时候会发现地图的全局代价地图只有部分会墙体会有代价,我用两个不同的仿真环境跑和用小车直接对场地进行建图来跑导航的时候,他们都会出现全局代价地图部分有部分没有,这个问题困扰了我们很久,一直没找到解决方法,难道做导航的时候就只能用amcl来定位了吗? | |
您还未登录,请登录后发表或查看评论



第三方账号登入
QQ 微博 微信