
手里有个双连杆的三轴教育用途的机械臂,带有一个末端工具吸盘,其长度和位置都已知。其末端还有一段结构,能保证吸盘姿态始终保持90°垂直向下。
厂家提供的运动学库越靠近工作空间边缘精度差的越多,位置精度无法保证。
打算自己写运动学库,又发现,无法让末端工具始终保持垂直90°。针对这种末端工具,也不知道逆运动学改怎么写。
自己写的正运动学和DH参数,如下:

运行的仿真效果如下,最后一截代表吸盘的那一段无法保证始终垂直朝下:
机械臂实物图:
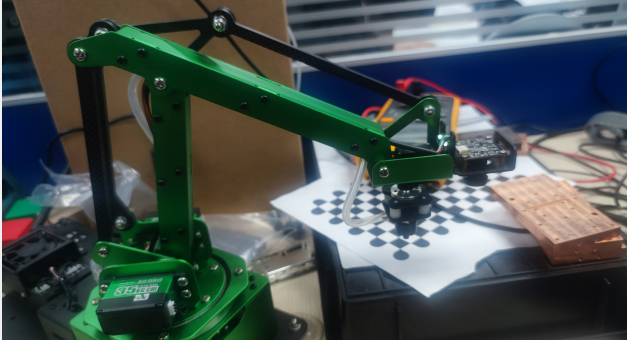
有人玩过类似的机械臂吗?可以提供点经验吗?
手里有个双连杆的三轴教育用途的机械臂,带有一个末端工具吸盘,其长度和位置都已知。其末端还有一段结构,能保证吸盘姿态始终保持90°垂直向下。
厂家提供的运动学库越靠近工作空间边缘精度差的越多,位置精度无法保证。
打算自己写运动学库,又发现,无法让末端工具始终保持垂直90°。针对这种末端工具,也不知道逆运动学改怎么写。
自己写的正运动学和DH参数,如下:
运行的仿真效果如下,最后一截代表吸盘的那一段无法保证始终垂直朝下:
机械臂实物图:
有人玩过类似的机械臂吗?可以提供点经验吗?
您还未登录,请登录后发表或查看评论




第三方账号登入
QQ 微博 微信