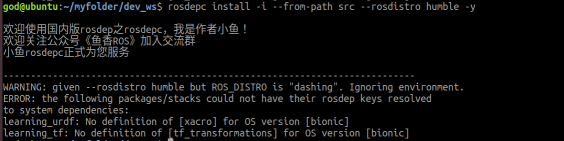
请问这个依赖问题怎么解决呢? 18.04 ros2 已经安装好了
您还未登录,请登录后发表或查看评论
《ROS2入门21讲》课程答疑交流。课程链接:https://class.guyuehome.com/detail/p_628f4288e4b01c509ab5bc7a/6?fromH5=true
第三方账号登入
看不清?点击更换






第三方账号登入
QQ 微博 微信