
提问者软件版本:
WSL + Ubuntu 20.04
ros1 noetic
提问内容:
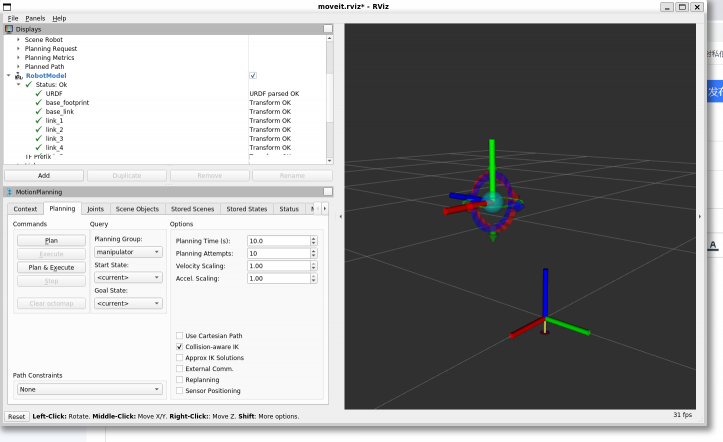
在古月居《moveit编程入门》第二课《关节空间》中,执行机械臂demo
roslaunch probot_anno_moveit_config demo.launch
执行后发现rviz如下图所示。再执行配套的机械臂运动demo,可以发现坐标系是可以按要求移动的
题外话:提问者之前也遇到了类似的事情,在执行moveit官方教程的panda_robot时,也出现了只显示机械手末端,不显示模型的情况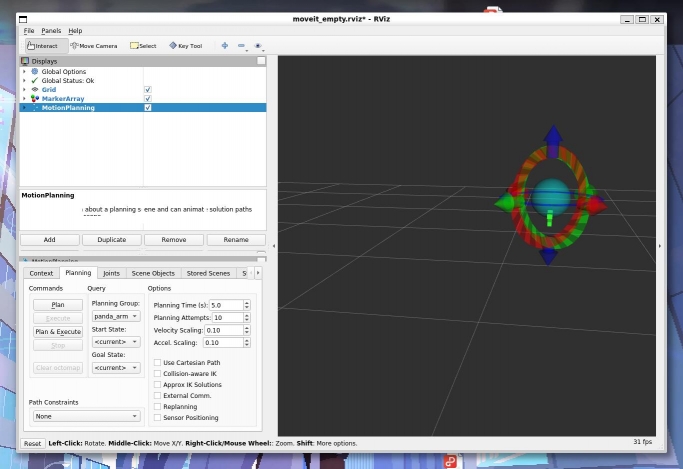
对于panda_robot问题曾经在github上找到过几乎相同的问题,当时给的解决方案是:①切换linux语言为美式英语 ②将RTC改为UTC,我都试过了,但是仍然没有效果
请问各位大佬遇到过没有?




第三方账号登入
QQ 微博 微信