
VREP环境下仿真控制youBot抓取和移动物体已结项
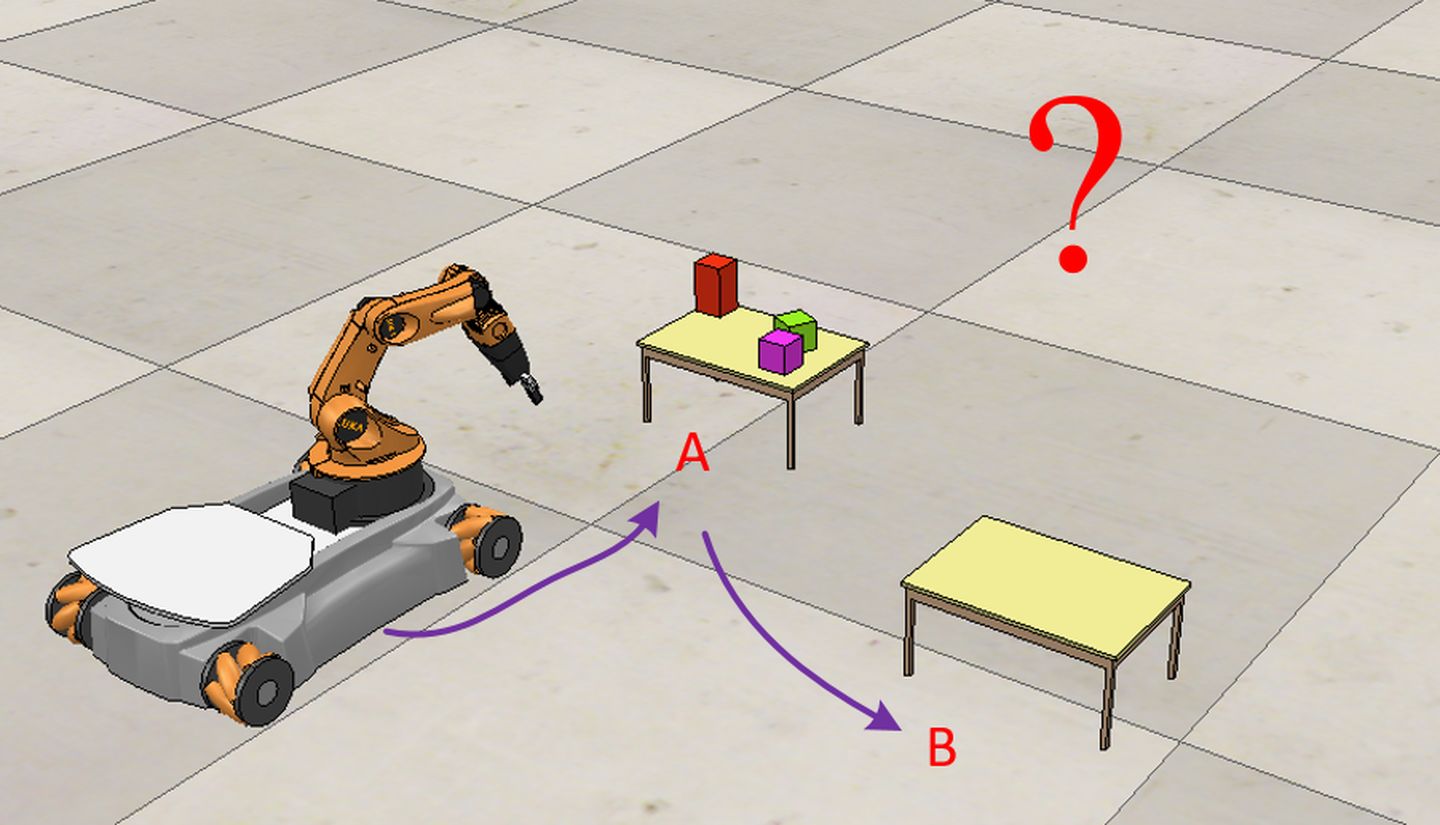
本项目为一系列的V-REP自学笔记,项目最终完成一个Demo。使用官方提供的KUKA公司的YouBot机器人模型来实验机器人的感知和控制过程,控制机器人从A点抓取物品,然后移动到B点将物品放置在B点的工作台上,这其中涉及到V-REP环境中的机器人感知和控制过程。





本项目为一系列的V-REP自学笔记,项目最终完成一个Demo。使用官方提供的KUKA公司的YouBot机器人模型来实验机器人的感知和控制过程,控制机器人从A点抓取物品,然后移动到B点将物品放置在B点的工作台上,这其中涉及到V-REP环境中的机器人感知和控制过程。

评论(1)
您还未登录,请登录后发表或查看评论