

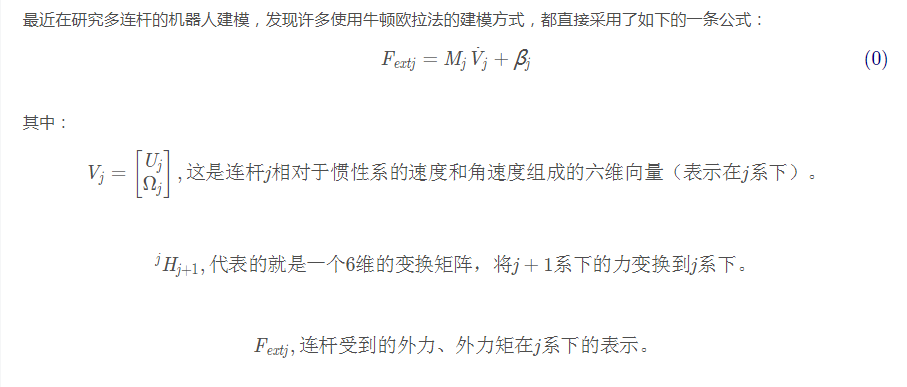
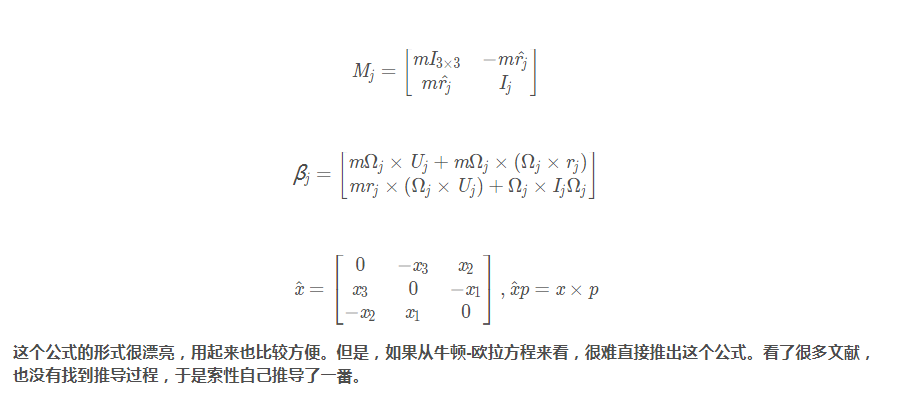
推导过程
1 问题描述
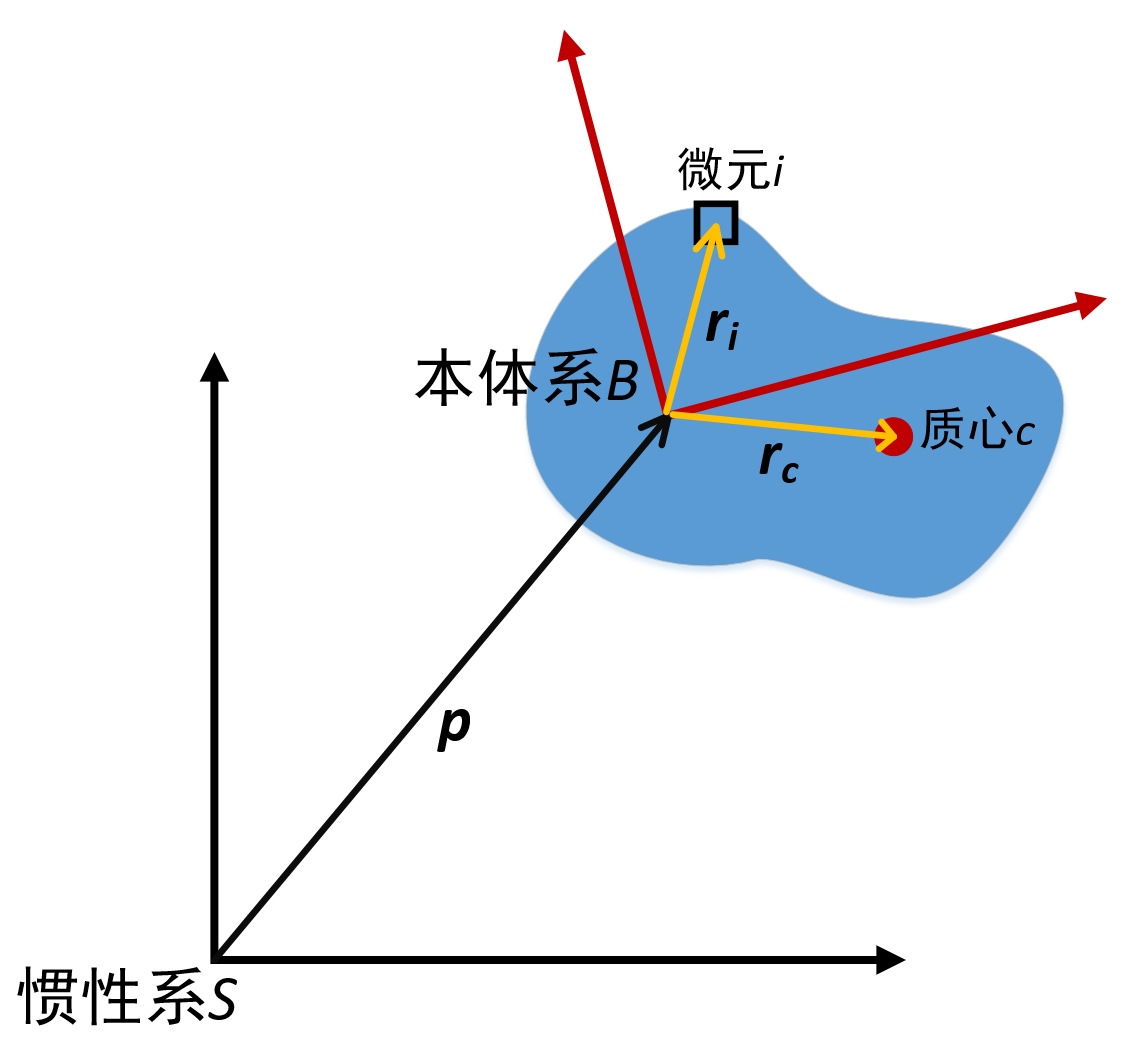
图中蓝色的物体表示一个刚体,我们选择刚体上的某一点,定义了一个与刚体固连的坐标系B,即本体系。 我们假设刚体可被视作为很多微元的组合,并且假设刚体是均匀的。 最终,我们希望得到外力与刚体相对惯性系的速度和加速度的关系式。2 符号说明
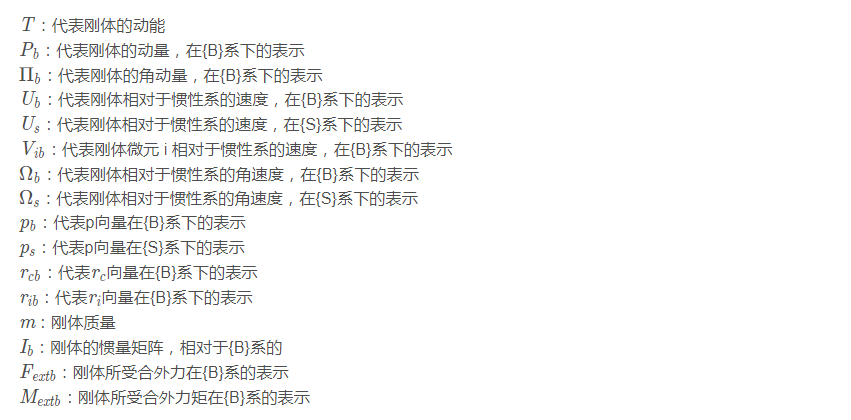
3 基本原理
第一步,计算刚体的动能。动能是个标量,在任何坐标系下表示都相等,但这个动能必须是相对惯性系而言的。
也就是说,速度和角速度必须是相对与惯性系的。
速度可以是表示在{B}系下的,也可以是{S}系下的。如果是相对于表示在{B}系下的速度求导,那么求出来的动量也是表示在{B}系下的。反之亦然。
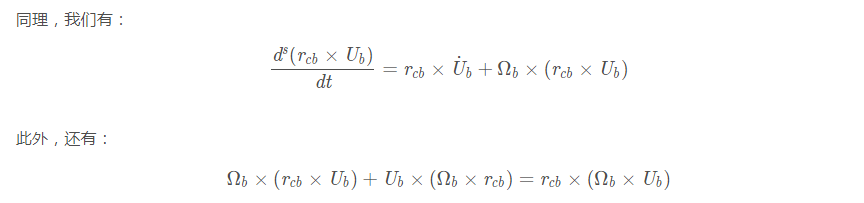
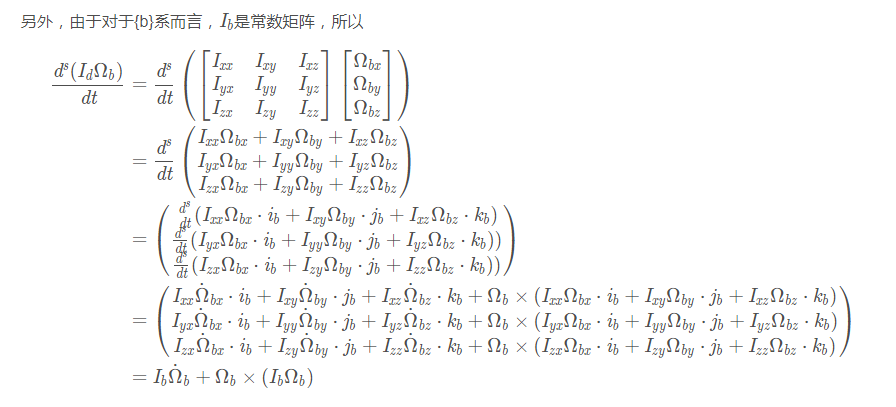
这一步的求导需要格外注意。我们需要在惯性系下对时间求导,这样出来的才会是外力。牛顿定律只在惯性系下有效。
如何在惯性系下求导,参考博文[关于机器人运动学与动力学建模的几点领悟](https://blog.csdn.net/handsome_for_kill/article/details/96473701)
4 好戏开始
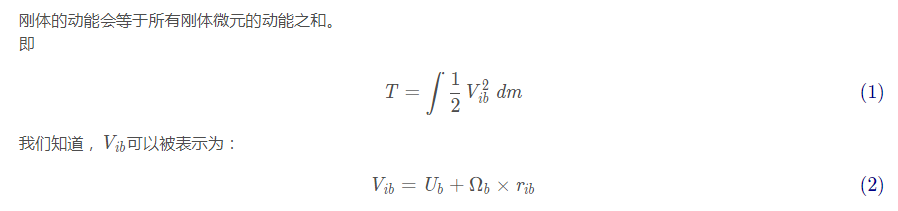
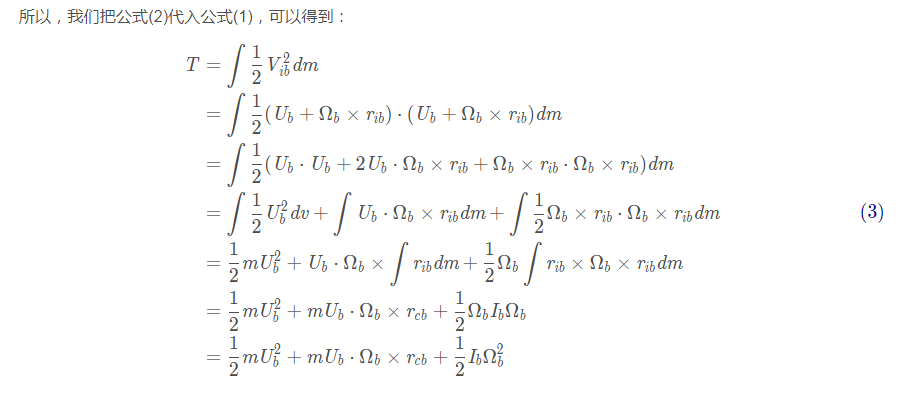
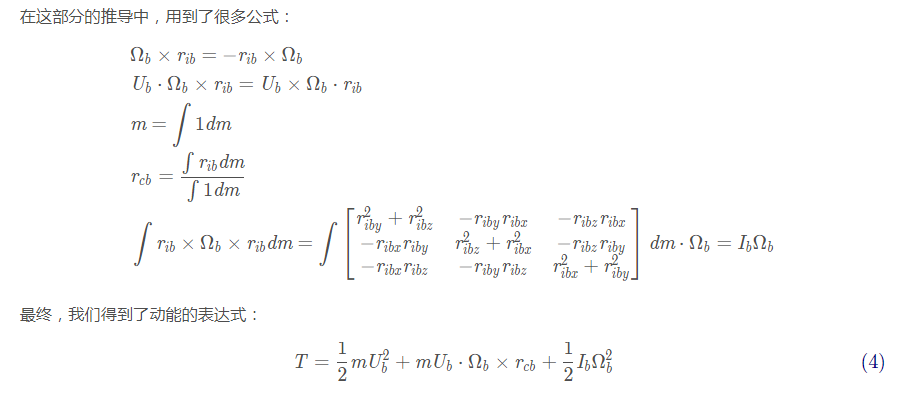
4.1 计算刚体动能
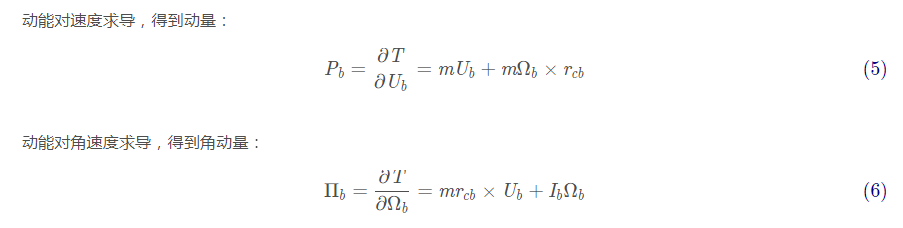
4.2 计算刚体动量
4.3 计算与合外力的关系
 这篇文章中就不详细推导了,这部分推导可以参见文章:机器人动力学建模之刚体动力学基础学习
这篇文章中就不详细推导了,这部分推导可以参见文章:机器人动力学建模之刚体动力学基础学习


评论(0)
您还未登录,请登录后发表或查看评论