在海龟仿真器下输入按键,通过服务端接收数据,并把数据发送给海龟仿真器
1.创建功能包
在上一篇博客创建的功能包下开发,所以就不用创建了
然后在你创建的learning_service文件下的src文件下创建一个pose_subscriber.cpp文件
2.在.cpp文件中输入以下内容
#include <ros/ros.h>
#include <geometry_msgs/Twist.h>
#include <std_srvs/Trigger.h>
ros::Publisher turtle_vel_pub;
bool pubCommand = false;
bool commandCallback(std_srvs::Trigger::Request &req,
std_srvs::Trigger::Response &res)
{
pubCommand = !pubCommand;
ROS_INFO("Publish turtle velocity command [%s]", pubCommand==true?"Yes":"No");
res.success = true;
res.message = "Change turtle command state!";
return true;
}
int main(int argc, char **argv)
{
ros::init(argc, argv, "turtle_command_server");
ros::NodeHandle n;
ros::ServiceServer command_service = n.advertiseService("/turtle_command", commandCallback);
turtle_vel_pub = n.advertise<geometry_msgs::Twist>("/turtle1/cmd_vel", 10);
ROS_INFO("Ready to receive turtle command.");
ros::Rate loop_rate(10);
while(ros::ok())
{
ros::spinOnce();
if(pubCommand)
{
geometry_msgs::Twist vel_msg;
vel_msg.linear.x = 0.5;
vel_msg.angular.z = 0.2;
turtle_vel_pub.publish(vel_msg);
}
loop_rate.sleep();
}
return 0;
}
综上,如何实现一个服务器
- 初始化ROS节点;
- 创建Server实例
- 循环等待服务请求,进入回调函数;
- 在回调函数中完成服务功能的处理,并反馈应答数据。
3.编辑CMakeLists.txt
加上这两句
add_executable(turtle_command_server src/turtle_command_server.cpp)
target_link_libraries(turtle_command_server ${catkin_LIBRARIES})
4.编译并运行发布者
cd /catkin_ws
catkin_make
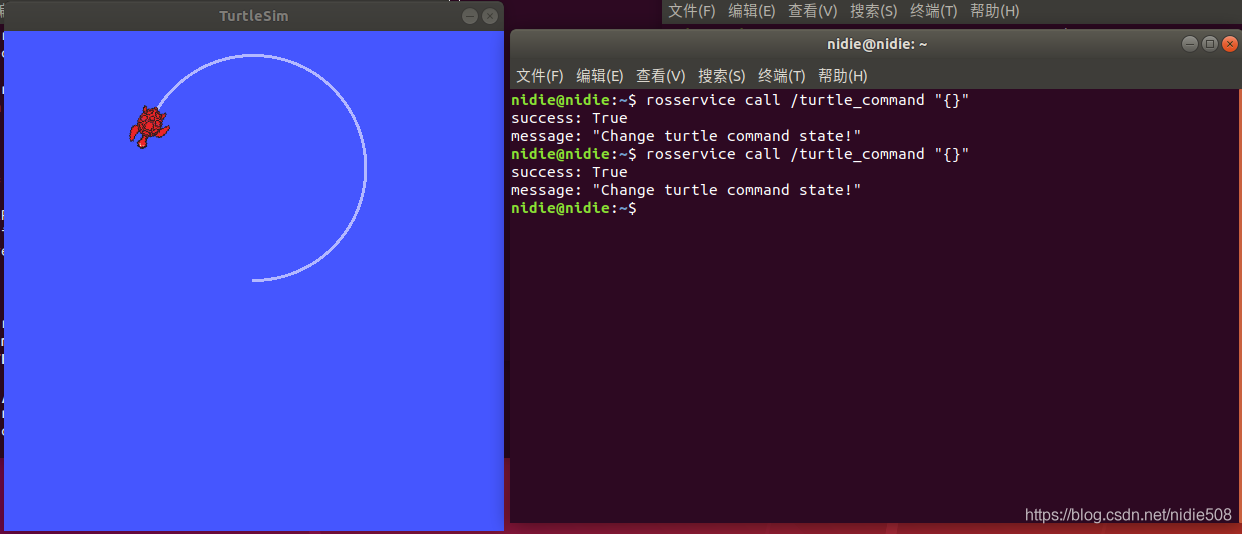
5.验证
roscore
rosrun turtlesim turtlesim_node
rosrun learning_service turtle_command_server
rosservice call /turtle_command "{}"
当然,以上四个命令都是在不同终端下输入
第四个命令是Trigger的参数,输入为空
结果





评论(0)
您还未登录,请登录后发表或查看评论