

按照RVIZ的官方教材来一步步来,Markers: Sending Basic Shapes (C++),第一步先学习如何使用visualization_msgs/Marker 类型的消息发送简单的形状给RVIZ。
在~/rviz_ws/src中运行
catkin_create_pkg using_markers roscpp visualization_msgs
gedit using_markers/src/basic_shapes.cppcpp的代码如下:
#include <ros/ros.h>
#include <visualization_msgs/Marker.h>
int main( int argc, char** argv )
{
ros::init(argc, argv, “basic_shapes”);
ros::NodeHandle n;
ros::Rate r(1);
ros::Publisher marker_pub = n.advertise<visualization_msgs::Marker>(“visualization_marker”, 1);
// Set our initial shape type to be a cube
uint32_t shape = visualization_msgs::Marker::CUBE;
while (ros::ok())
{
visualization_msgs::Marker marker;
// Set the frame ID and timestamp. See the TF tutorials for information on these.
marker.header.frame_id = “/my_frame”;
marker.header.stamp = ros::Time::now();
// Set the namespace and id for this marker. This serves to create a unique ID
// Any marker sent with the same namespace and id will overwrite the old one
marker.ns = “basic_shapes”;
marker.id = 0;
// Set the marker type. Initially this is CUBE, and cycles between that and SPHERE, ARROW, and CYLINDER
marker.type = shape;
// Set the marker action. Options are ADD, DELETE, and new in ROS Indigo: 3 (DELETEALL)
marker.action = visualization_msgs::Marker::ADD;
// Set the pose of the marker. This is a full 6DOF pose relative to the frame/time specified in the header
marker.pose.position.x = 0;
marker.pose.position.y = 0;
marker.pose.position.z = 0;
marker.pose.orientation.x = 0.0;
marker.pose.orientation.y = 0.0;
marker.pose.orientation.z = 0.0;
marker.pose.orientation.w = 1.0;
// Set the scale of the marker — 1x1x1 here means 1m on a side
marker.scale.x = 1.0;
marker.scale.y = 1.0;
marker.scale.z = 1.0;
// Set the color — be sure to set alpha to something non-zero!
marker.color.r = 0.0f;
marker.color.g = 1.0f;
marker.color.b = 0.0f;
marker.color.a = 1.0;
marker.lifetime = ros::Duration();
// Publish the marker
while (marker_pub.getNumSubscribers() < 1)
{
if (!ros::ok())
{
return 0;
}
ROS_WARN_ONCE(“Please create a subscriber to the marker”);
sleep(1);
}
marker_pub.publish(marker);
// Cycle between different shapes
switch (shape)
{
case visualization_msgs::Marker::CUBE:
shape = visualization_msgs::Marker::SPHERE;
break;
case visualization_msgs::Marker::SPHERE:
shape = visualization_msgs::Marker::ARROW;
break;
case visualization_msgs::Marker::ARROW:
shape = visualization_msgs::Marker::CYLINDER;
break;
case visualization_msgs::Marker::CYLINDER:
shape = visualization_msgs::Marker::CUBE;
break;
}
r.sleep();
}
}
头文件不解释了
ros::init(argc, argv, “basic_shapes”);
ros::NodeHandle n;
ros::Rate r(1);
ros::Publisher marker_pub = n.advertise<visualization_msgs::Marker>(“visualization_marker”, 1);这四句话可以参考ROS教程中创建一个消息发布器的内容理解。
先初始化ROS。之后为这个进程的节点创建一个句柄。第一个创建的NodeHandle会为节点进行初始化,最后一个销毁的NodeHandle则会释放该节点所占用的所有资源。
定义循环频率。它会追踪记录自上一次调用Rate::sleep()后时间的流逝,并休眠直到一个频率周期的时间。
告诉 master 我们将要在visualization_marker(话题名) 上发布visualization_msgs::Marker消息类型的消息。这样 master 就会告诉所有订阅了visualization_marker话题的节点,将要有数据发布。第二个参数是发布序列的大小。如果我们发布的消息的频率太高,缓冲区中的消息在大于 1个的时候就会开始丢弃先前发布的消息。
uint32_t shape = visualization_msgs::Marker::CUBE;定义一个变量shape表示我们Marker的类型。
visualization_msgs::Marker marker;
// Set the frame ID and timestamp. See the TF tutorials for information on these.
marker.header.frame_id = “/my_frame”;
marker.header.stamp = ros::Time::now();
其实这里我没有太明白。要设置frame的ID和时间戳。教程说让我去看tf的教程,好的,下次一定。
程序其他没有什么太难理解的地方。
之后就是修改CmakeLists.txt,在最后加上两句话生成可执行文件
add_executable(basic_shapes src/basic_shapes.cpp)
target_link_libraries(basic_shapes ${catkin_LIBRARIES})
准备运行\
cd ~/rviz_ws
catkin_make
roscore
rosrun using_markers basic_shapes
接下来启动RVIZ
rosrun rviz rviz
修改Fixed Frame
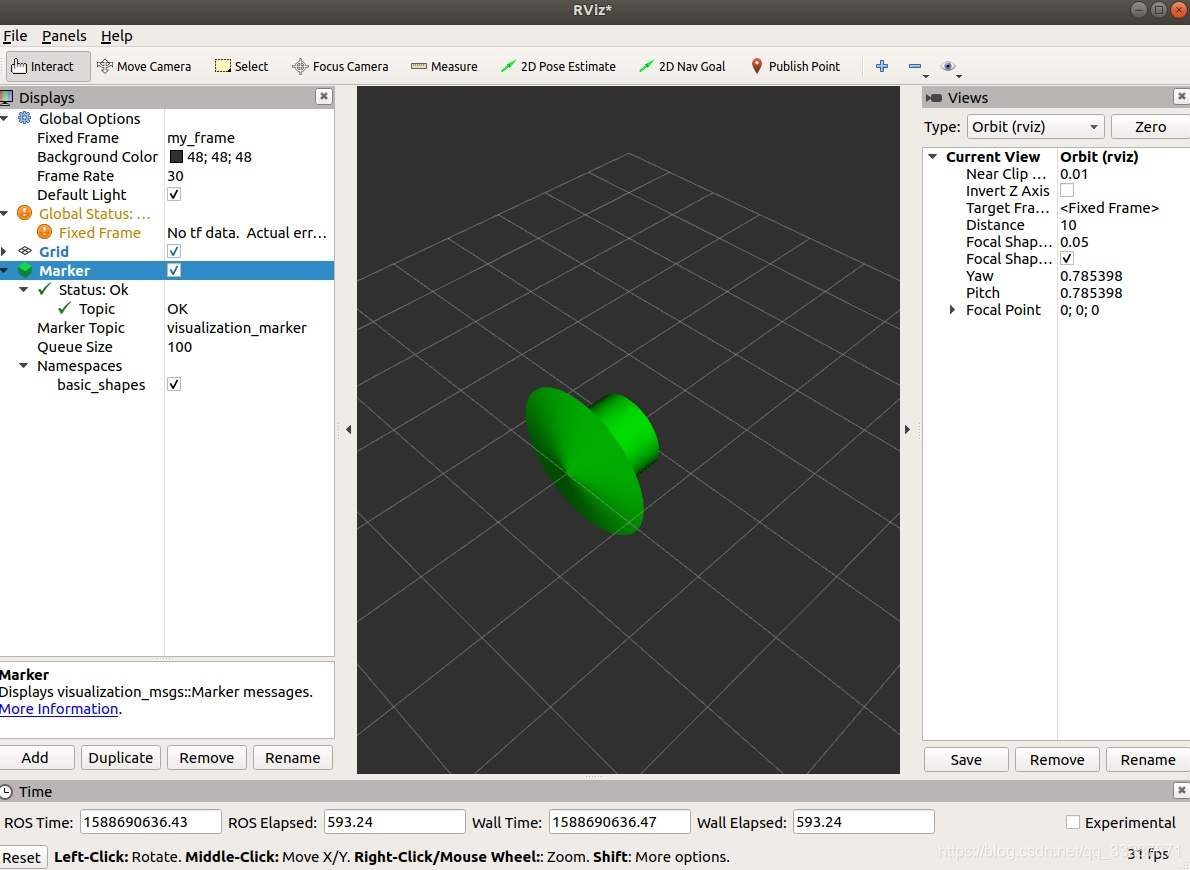
接下来添加一个Marker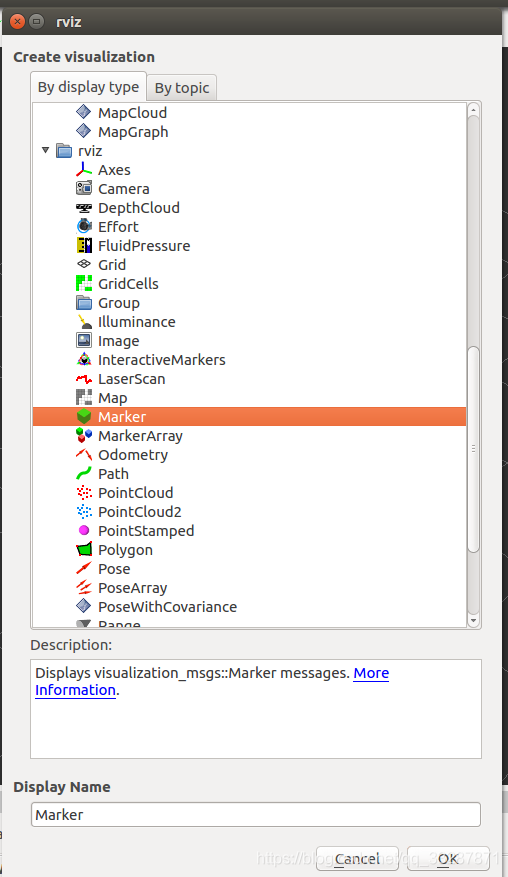
之后就能看到我们想要的结果了。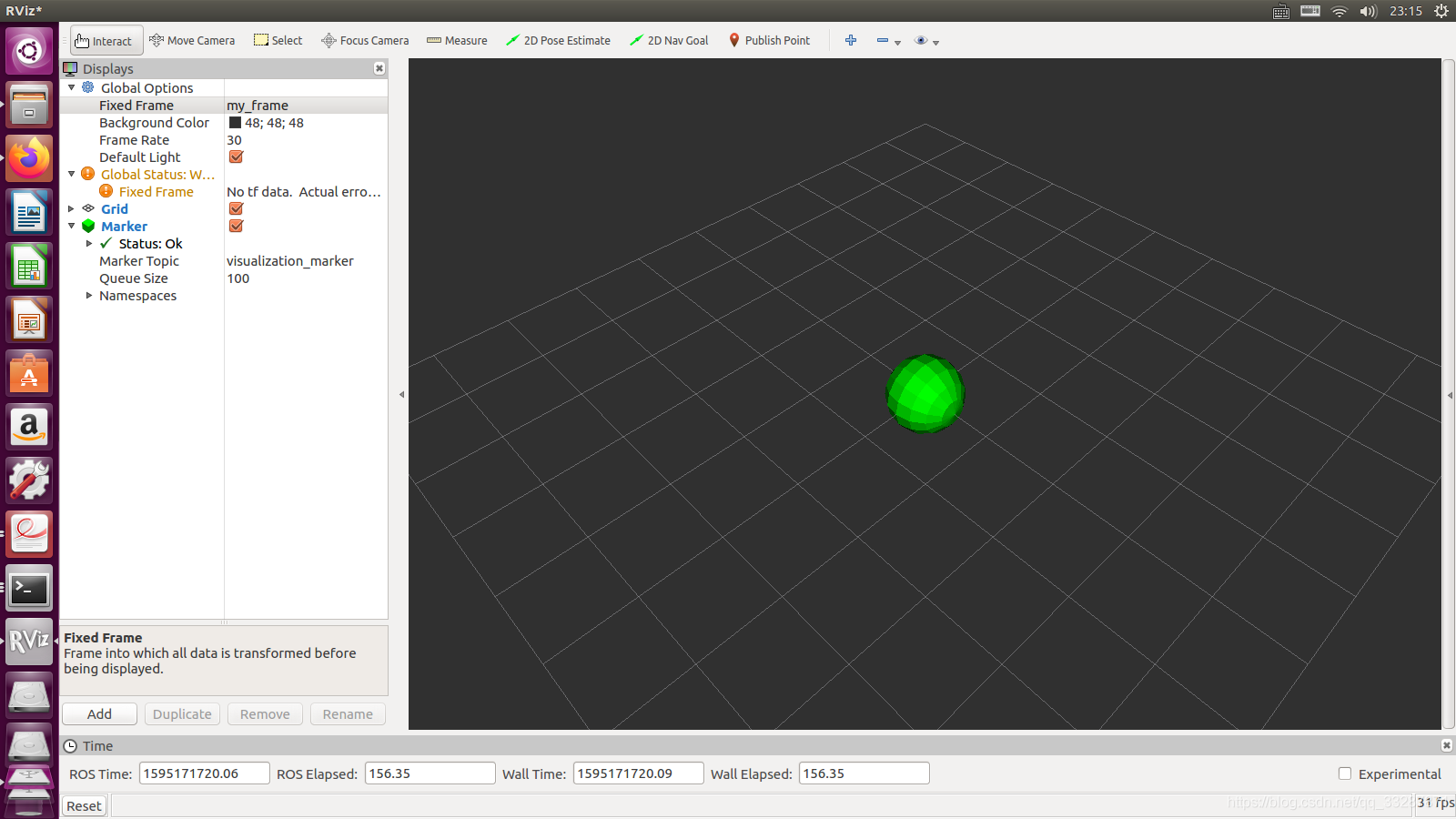

评论(1)
您还未登录,请登录后发表或查看评论