

软件源:一个是Ubuntu系统的软件元,在软件更新系统界面服务器的选择。
ROS包安装源:第一步配置的就是ros包安装源。功能包安装不畅可以改软件源,可以加国内的,EXbox的安装源。
在4中如果有找不到库的错误的话,需要我们讲拷贝科大讯飞编译生成的库文件开呗到libs中再试试。因为ros在找库文件时实在几个默认库之中搜索的。

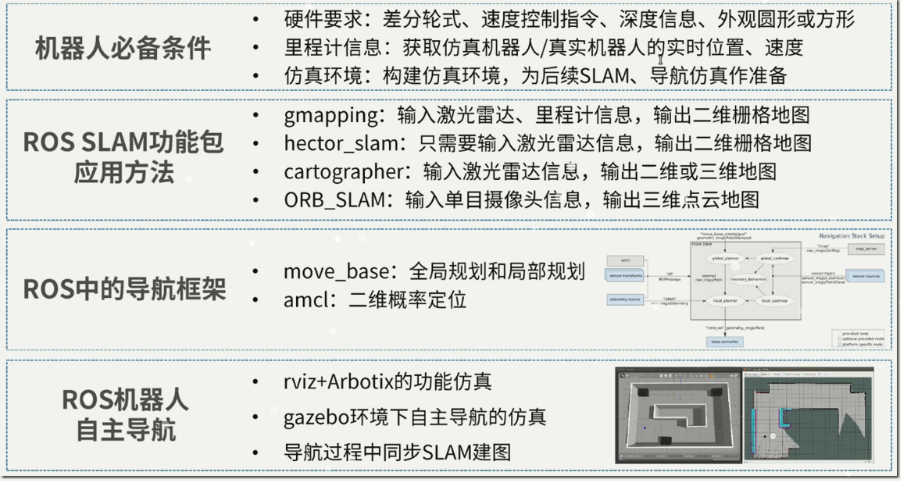
准备工作---硬件要求

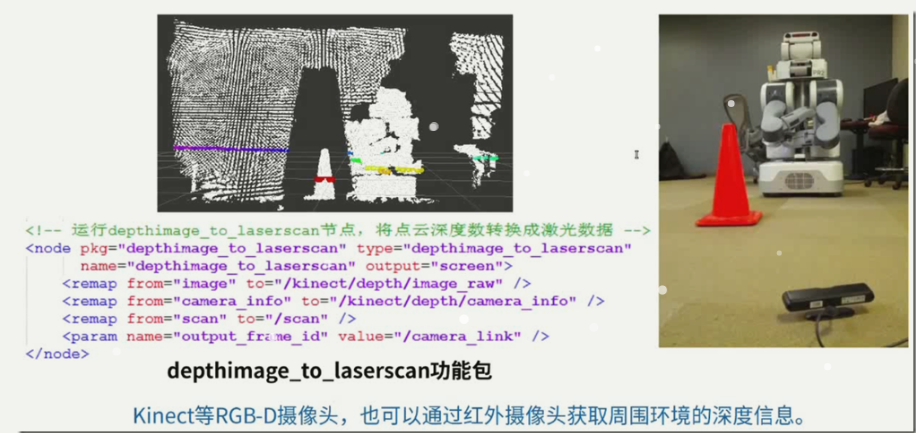
机器人必备条件---深度信息
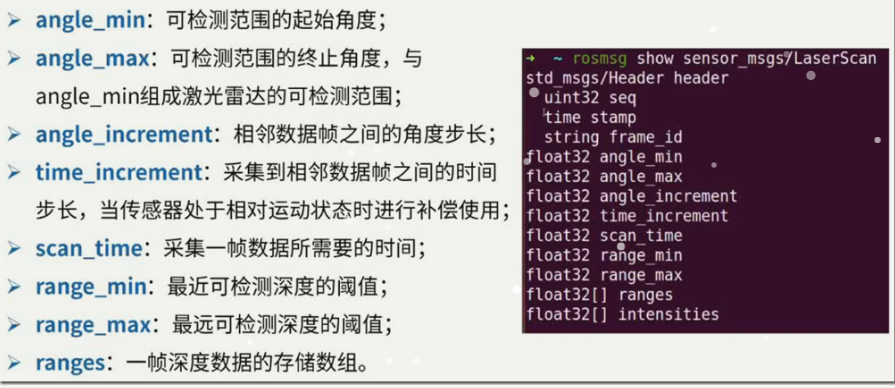
横向切面,每个面可以看作是激光雷达数据。激光雷达精度更高。
机器人必备条件---激光雷达

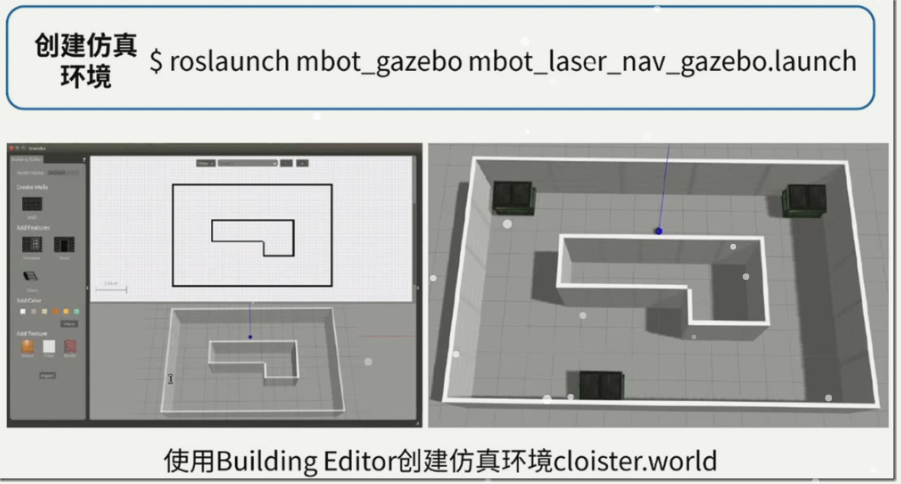
jiqi人必备条件---仿真环境
ROS SLAM功能包的使用方法---gmapping
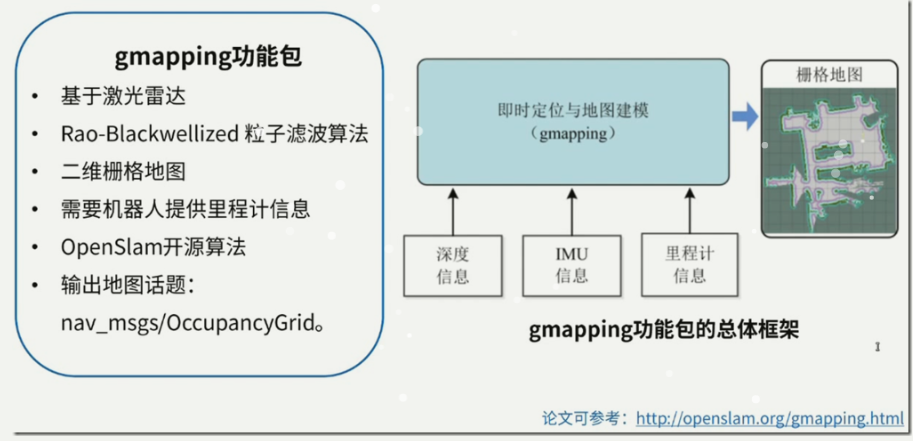
深度和里程计信息是最重要的。网站中有很多开源的算法。
gmapping安装(黑盒,只知道输入输出)
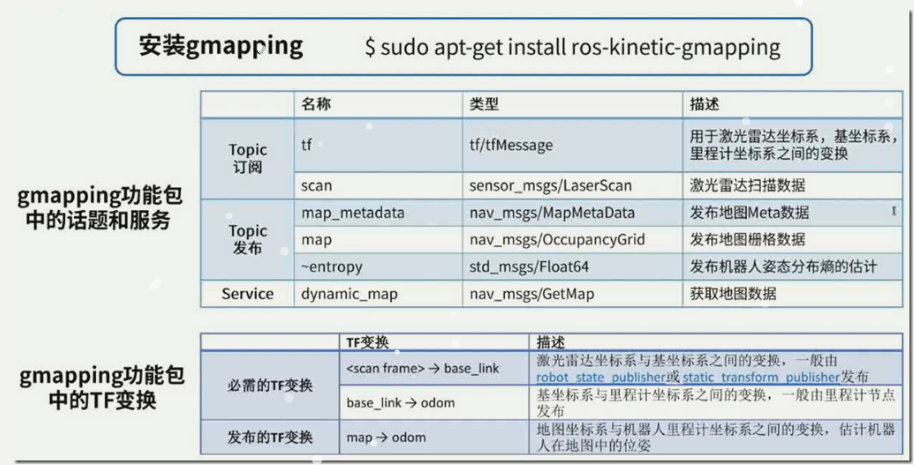
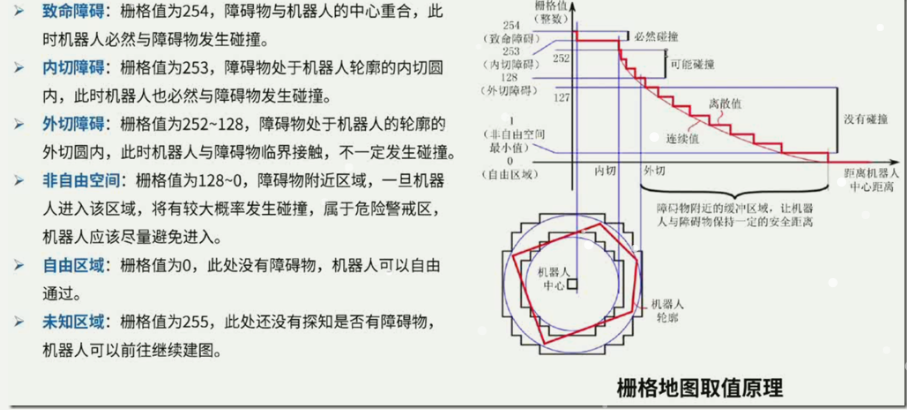
gmaping原理(栅格地图)
配置给mapping节点

5秒更新一次,如果很小对电脑要求就很高了。
功能包的应用搜索
在百度货谷歌搜索关键词ros gmapping查看wiki上功能包的使用方法。用谷歌浏览器可以翻译成中文。还包括源码在哪儿都会有说明。

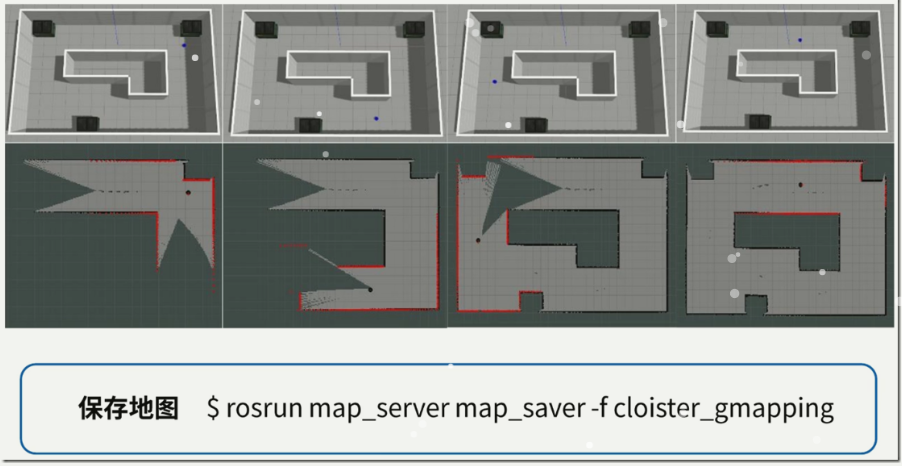
功能包启动(下载编译后)

给mapping地图的保存

turtlebot机器人可以用kinect摄像头mapping建图(没有激光雷达准确)

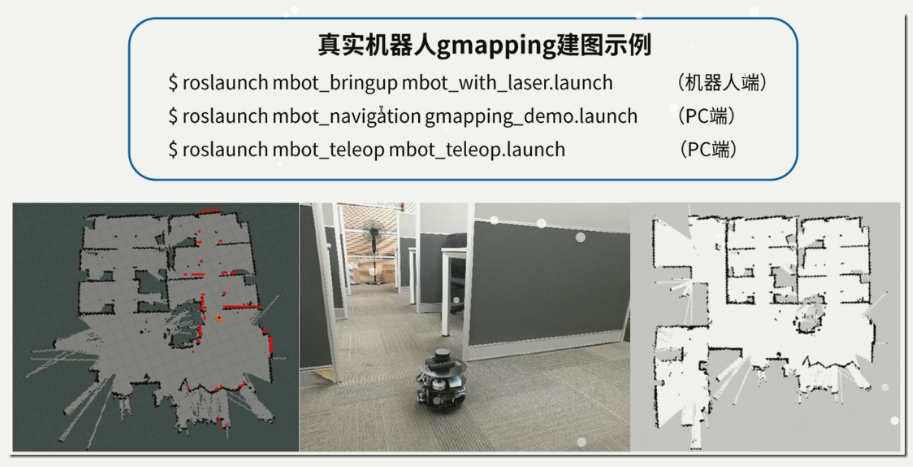
真实机器人gmapping建图
ROS SLAM功能包---hector_slam

激光雷达进度得高。
hector_slam功能包的安装

配置hector_maping节点

启动hector_slam建图
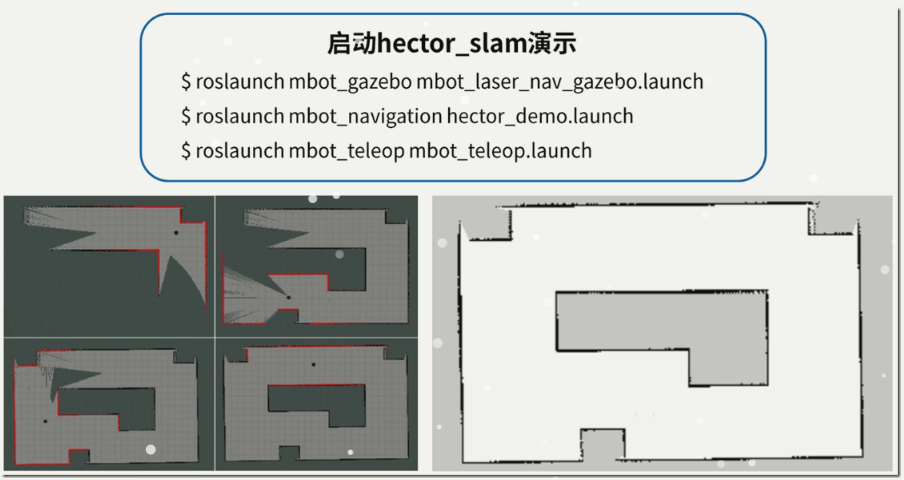
速度过快:要重新建图

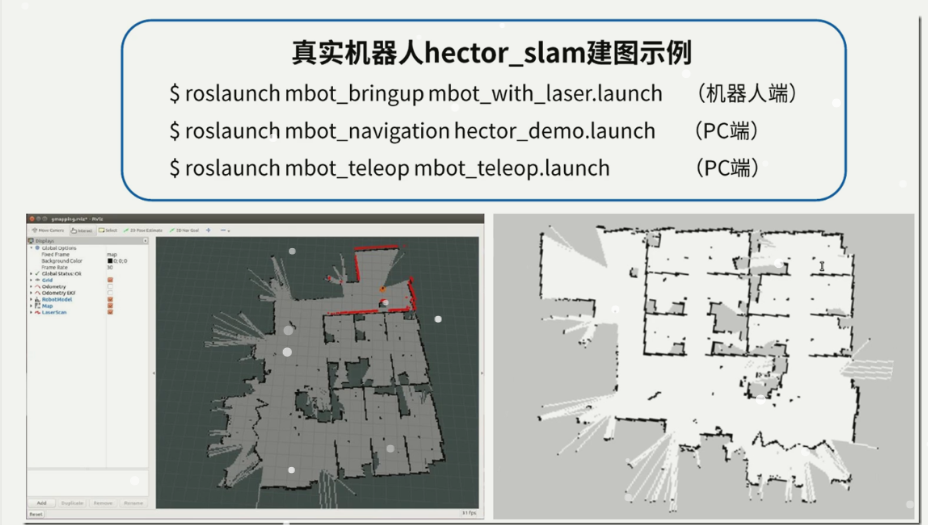
真实机器人hector_slam建模
ROS SLAM功能包---cartographer(未仿真)
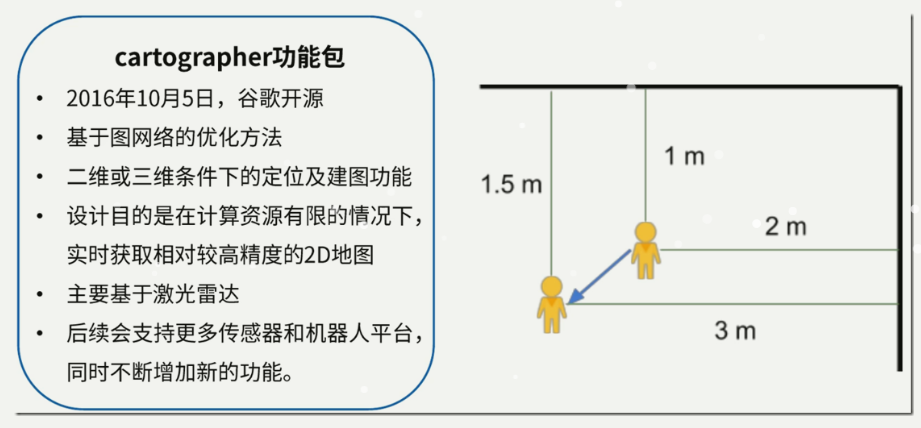
cartographer功能包安装(较复杂)

不过现在ROS之中已经集成了catographer功能包。可以用apt-get下载。
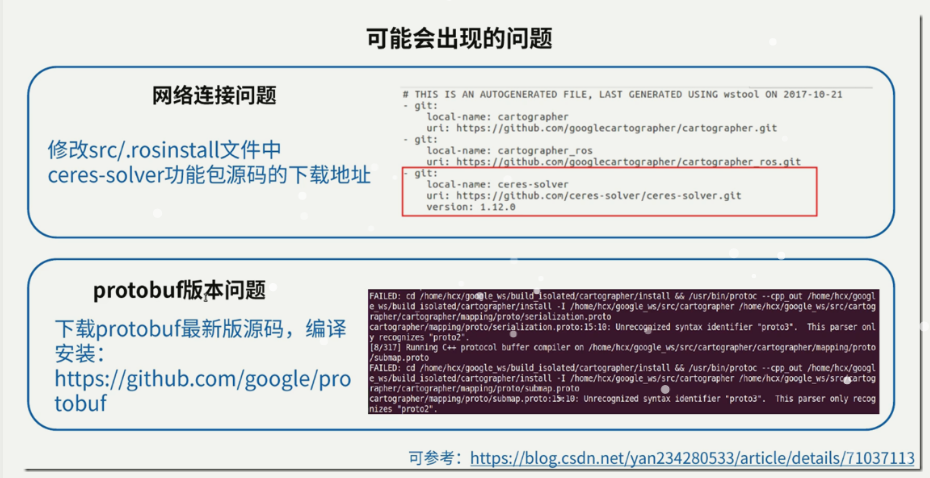
 网络问题在工程src/.rosinstall
网络问题在工程src/.rosinstall启动2D slam demo演示
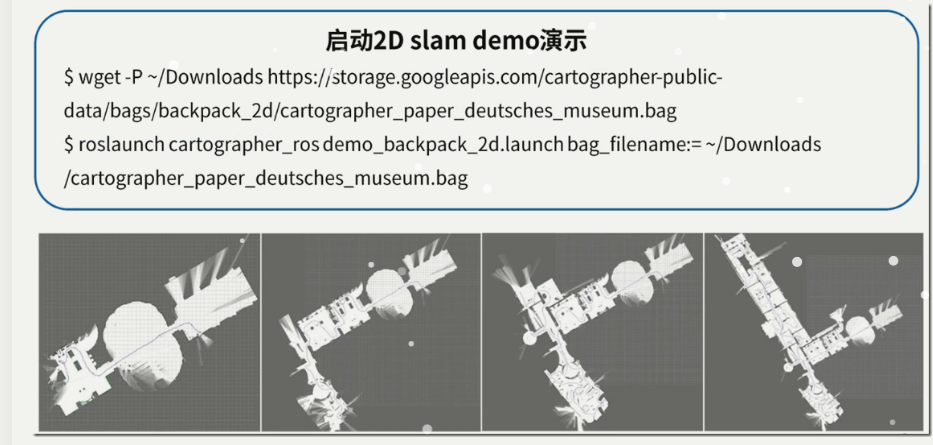
wget -p ~/Dowanloads https://storage.googleapis.com/cartographer-punlic-data/bags/backpack_2d/cartographer_paper_deutsches_museum.bag
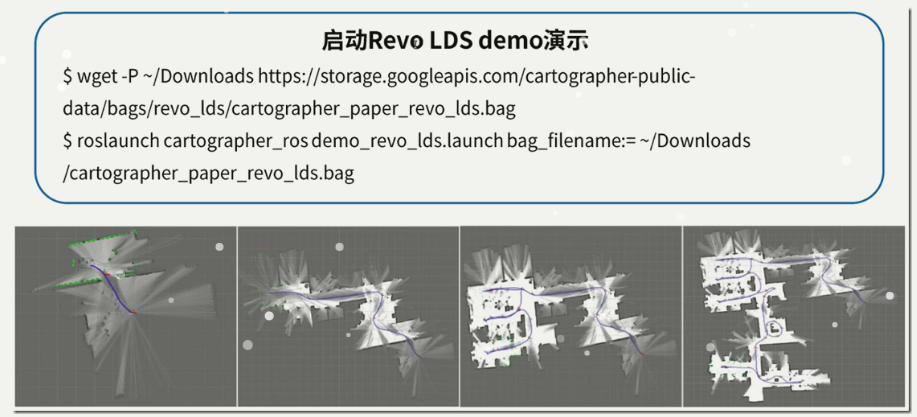
跟激光雷达类似的低成本传感器代码演示
摄像头图像

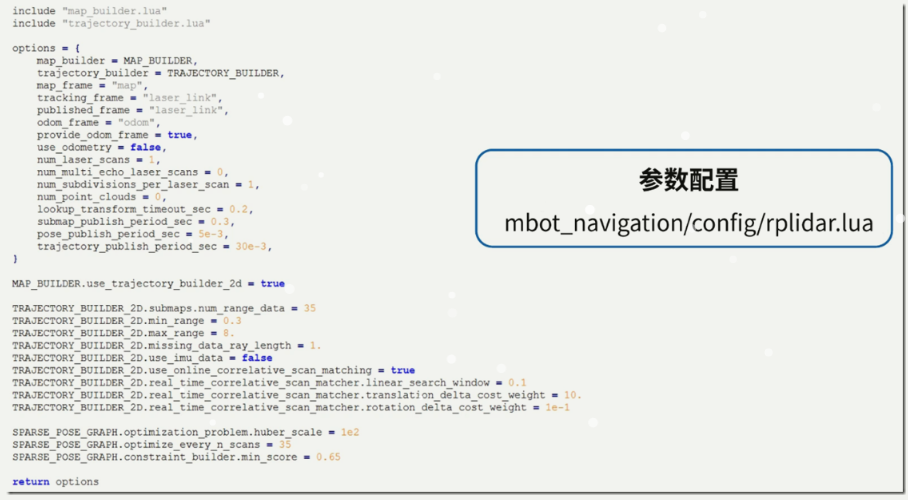
cartographer功能包配置节点
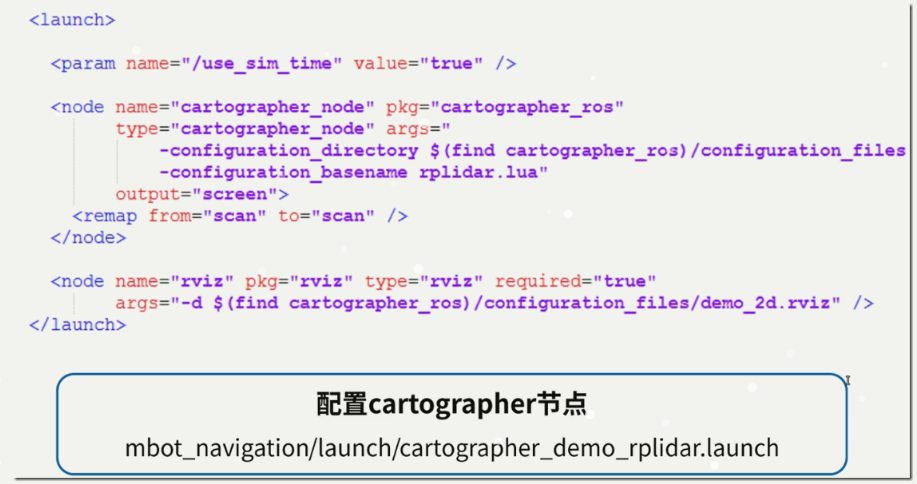
配置的脚本文件
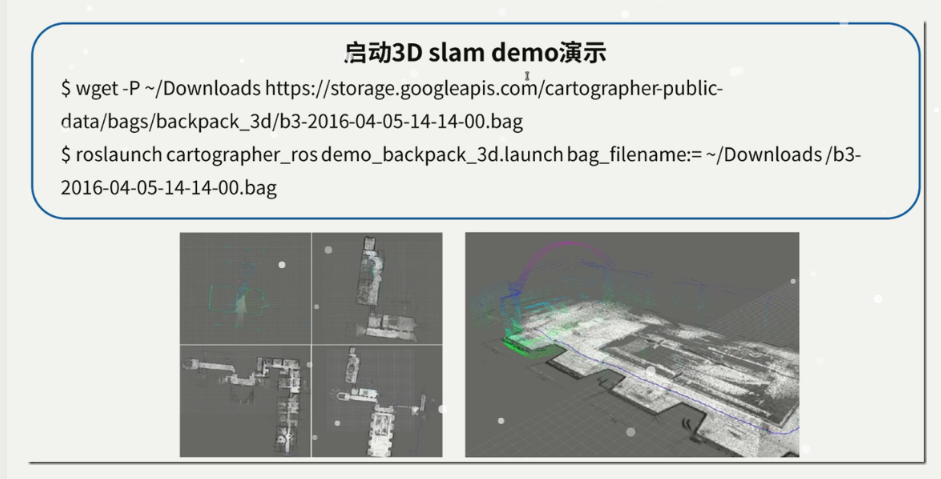
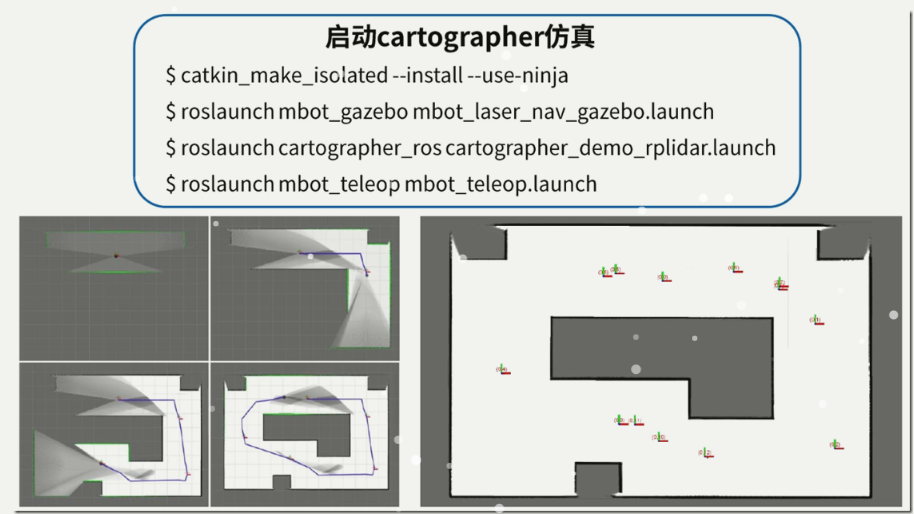
cartographer仿真
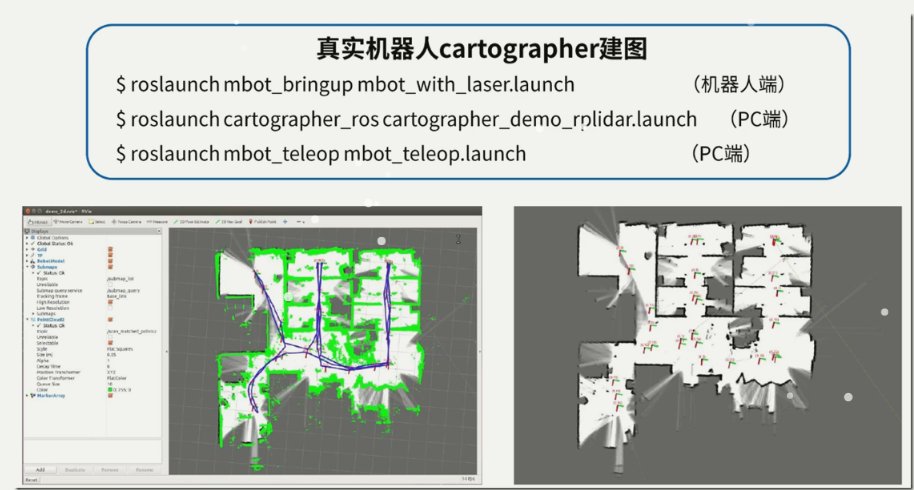
真实机器人cartographer建图
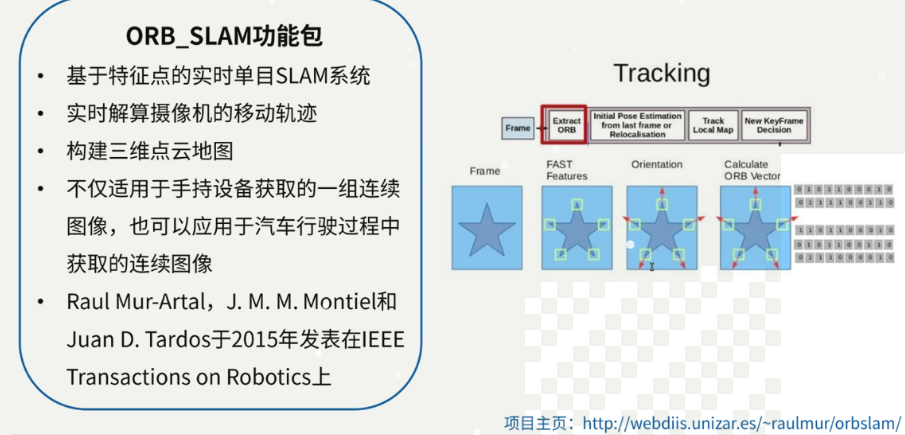
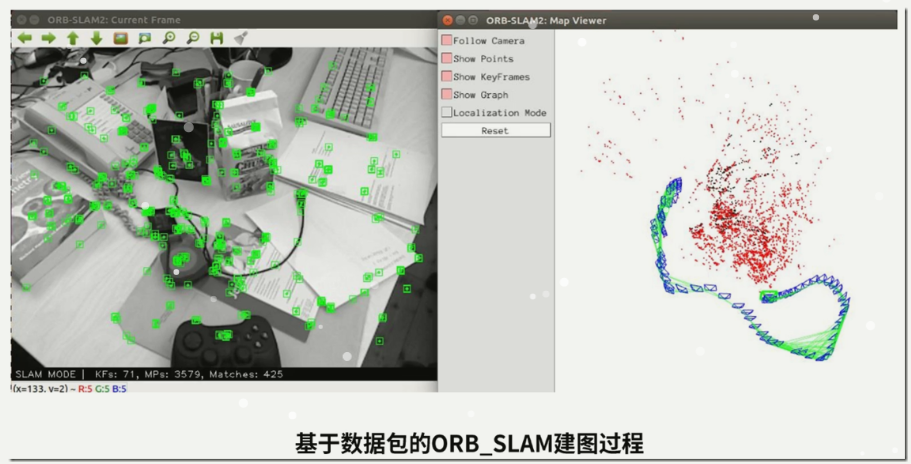
ROS SLAM功能包---ORB_SLAM(单目摄像头,手持设备就可以)未仿真
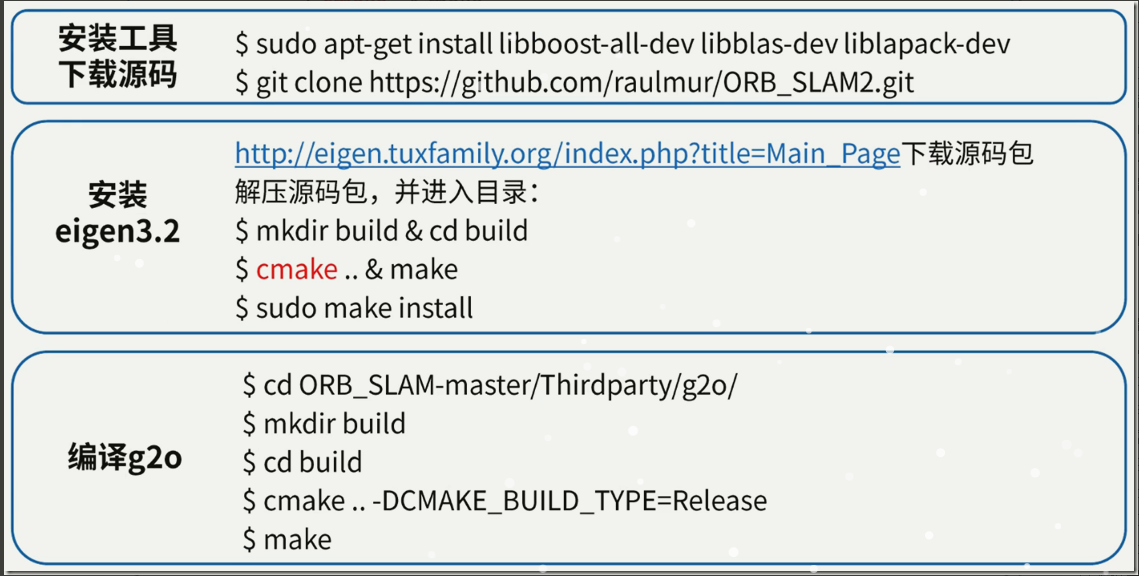
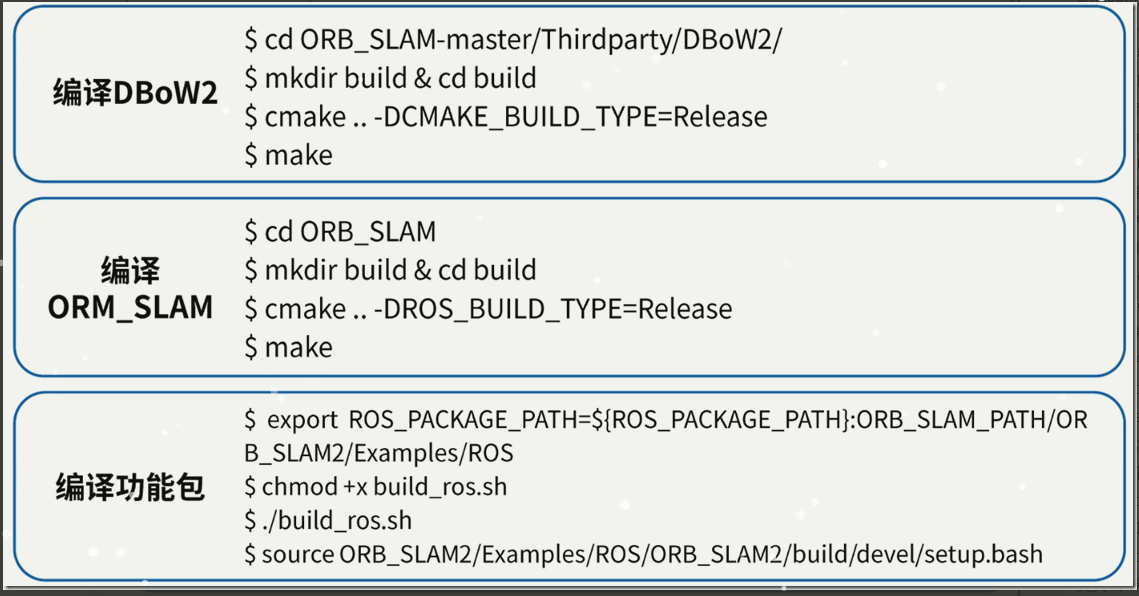
ORB_SLAM安装(更复杂)
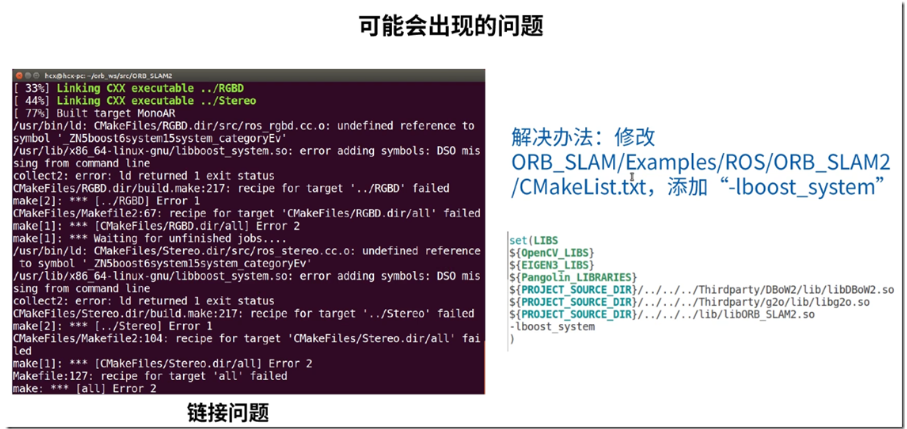
可能会产生的问题
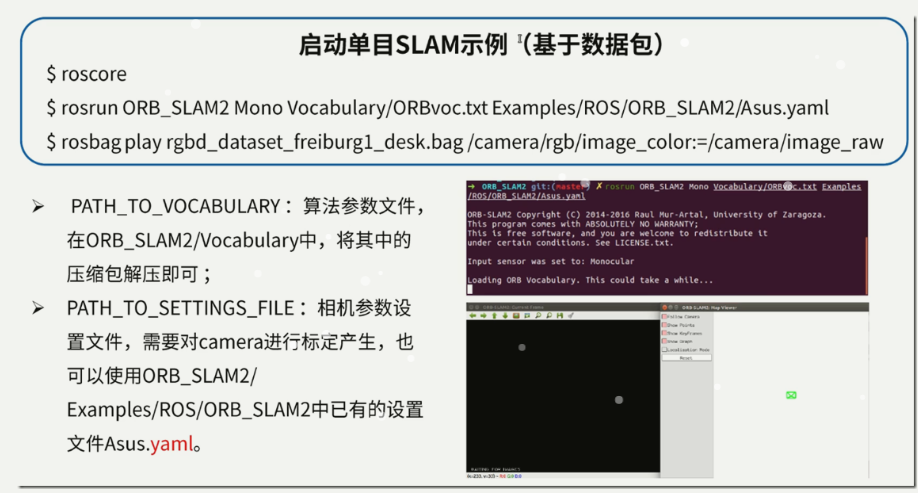
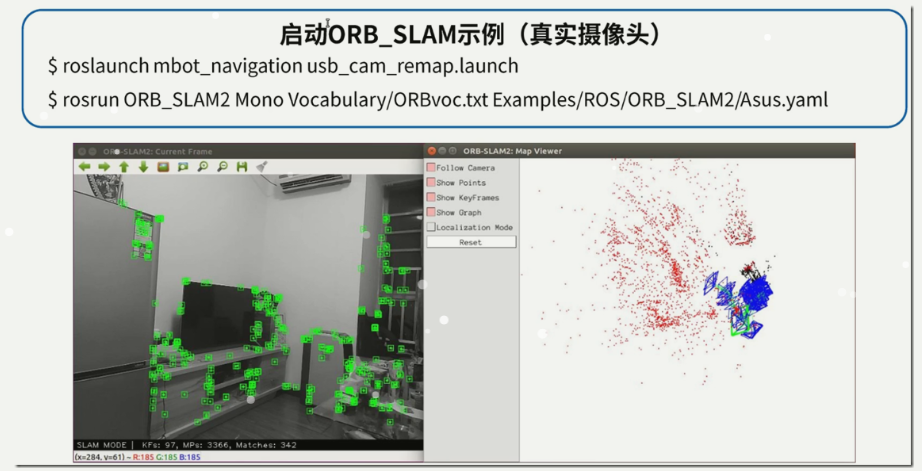
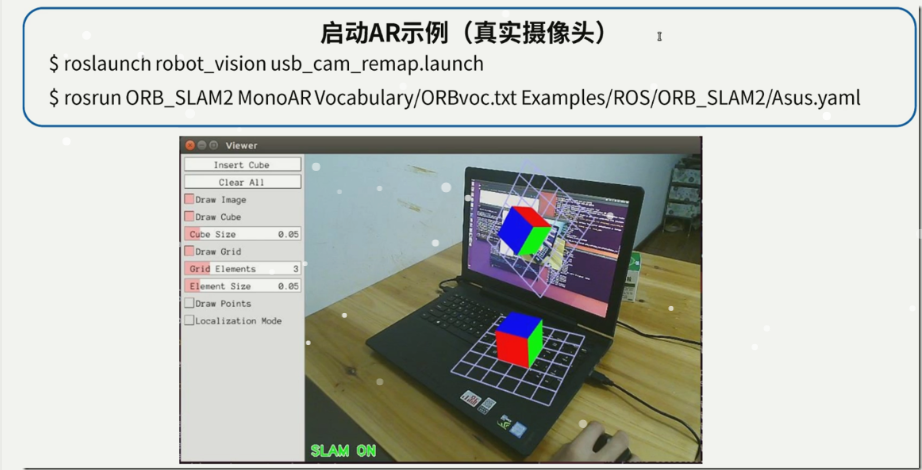
启动ORB_SLAM
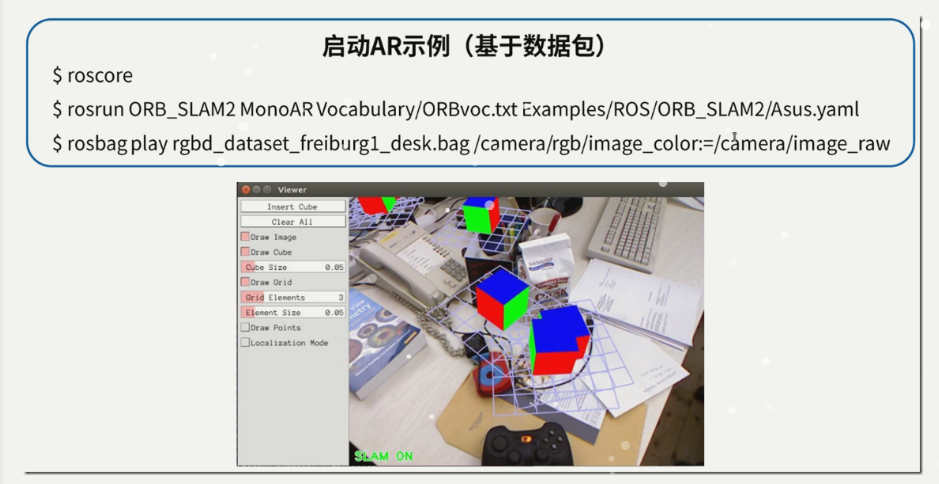
用电脑摄像头或是外置摄像头实例
ROS导航框架
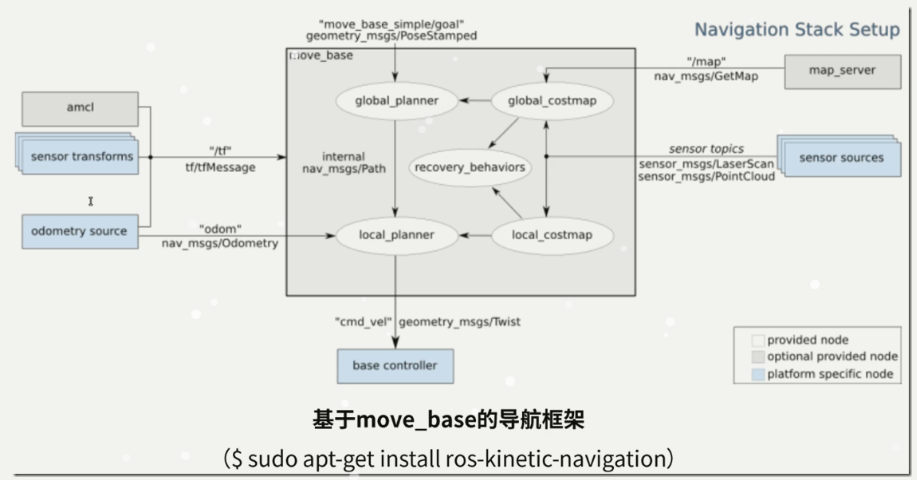
amcl概率定位功能包。蓝色部分是要我们自己来实现驱动的。
主要用的是中间的部分和amcl功能包。
move_base功能包


move_base配置

在wiki上找move_base的介绍。包括四个文件,有机器人半径尺寸的设置。
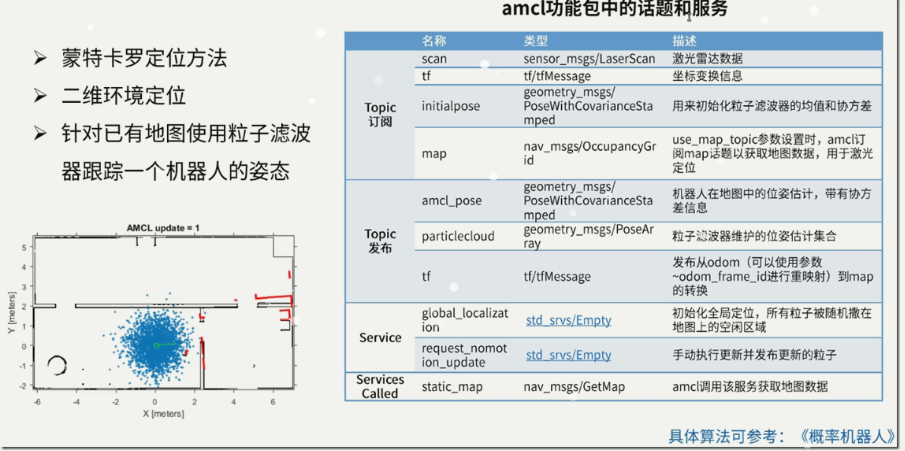
amcl功能包(蒙特卡罗定位方法)
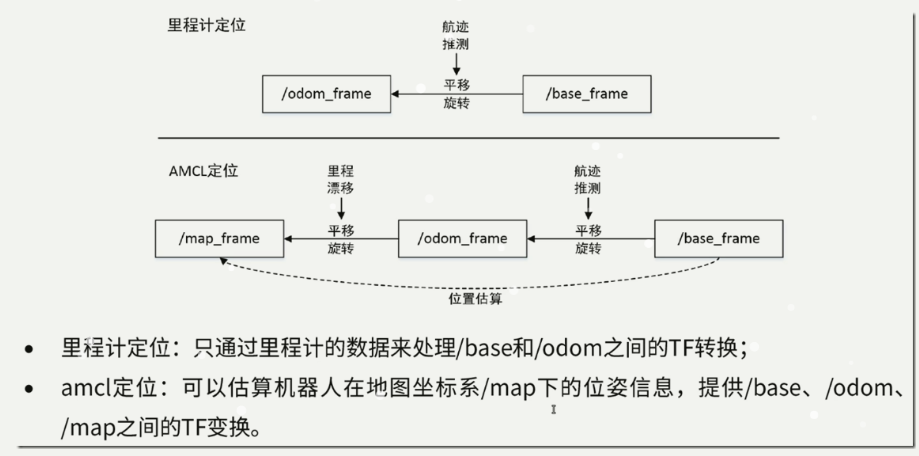
里程计定位
amcl配置

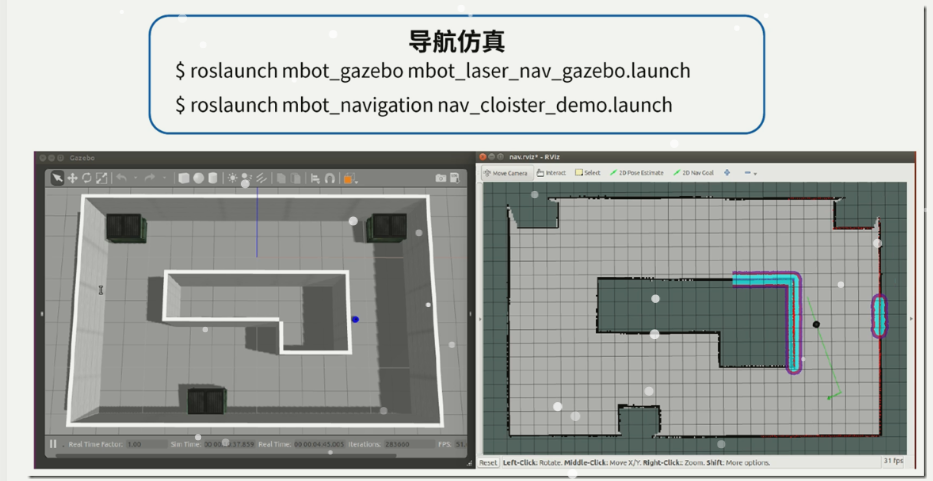
ROS机器人自主导航
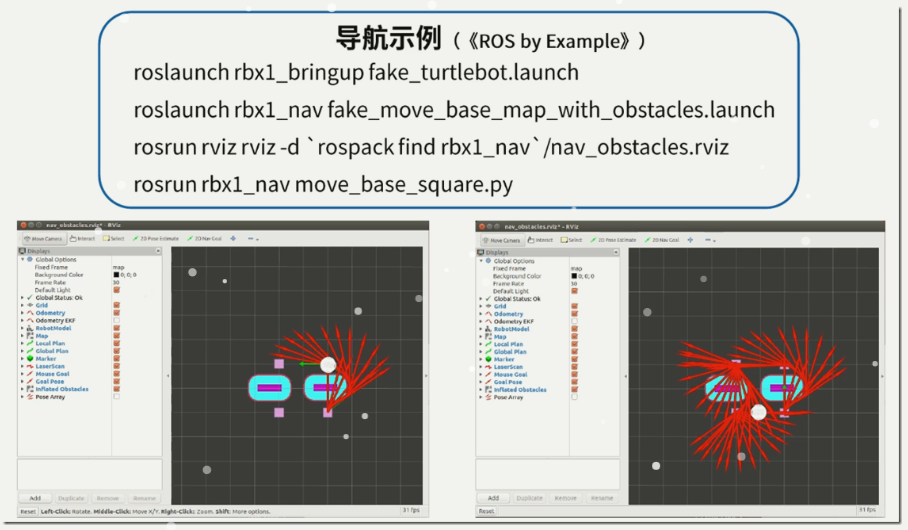
导航仿真
SLAM+自主导航(自主建模并导航)
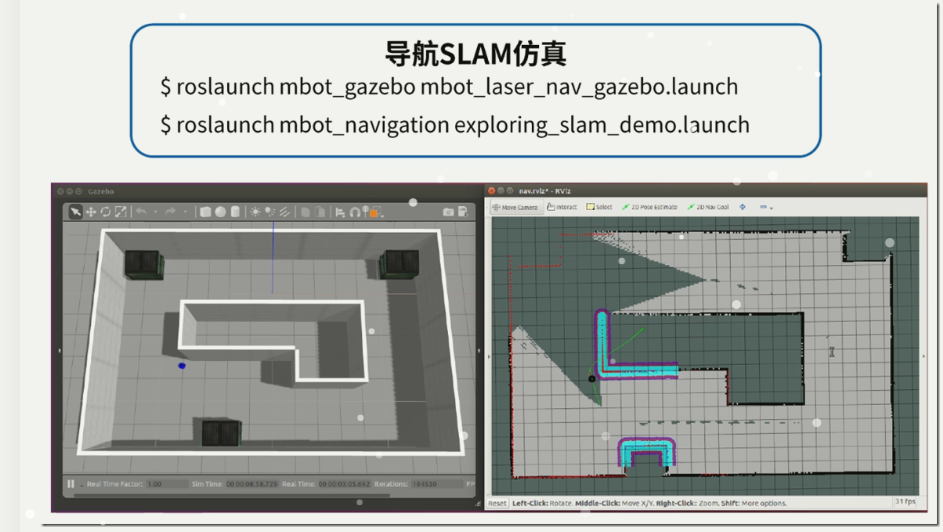
整个地图自主构建
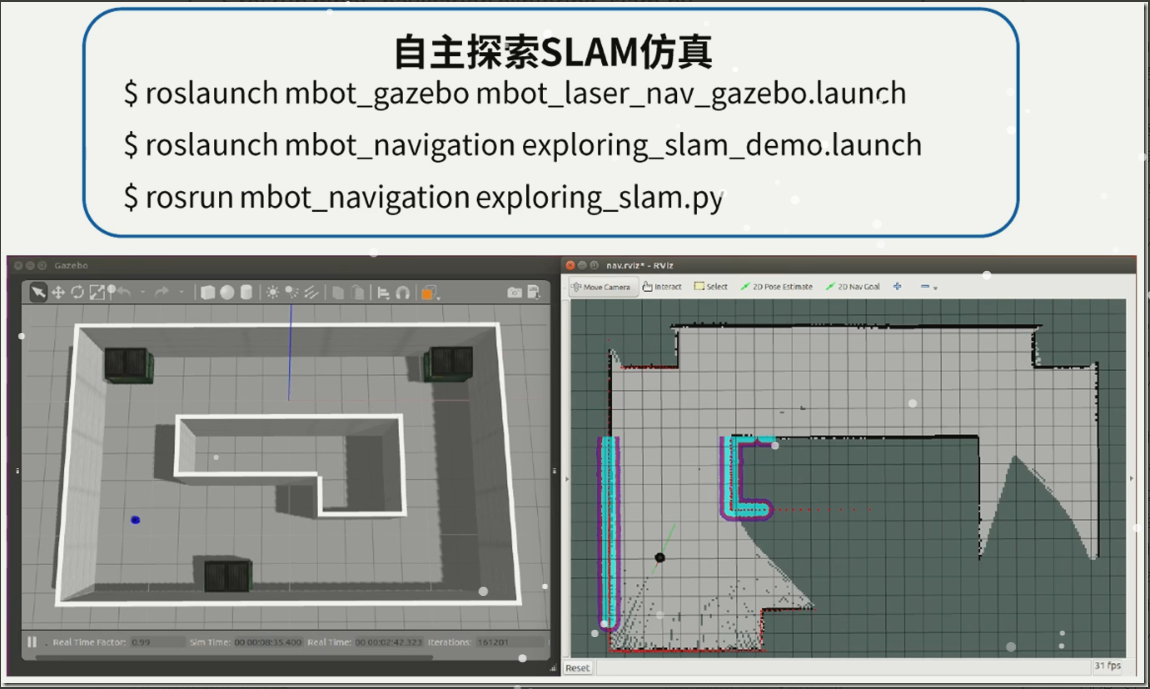
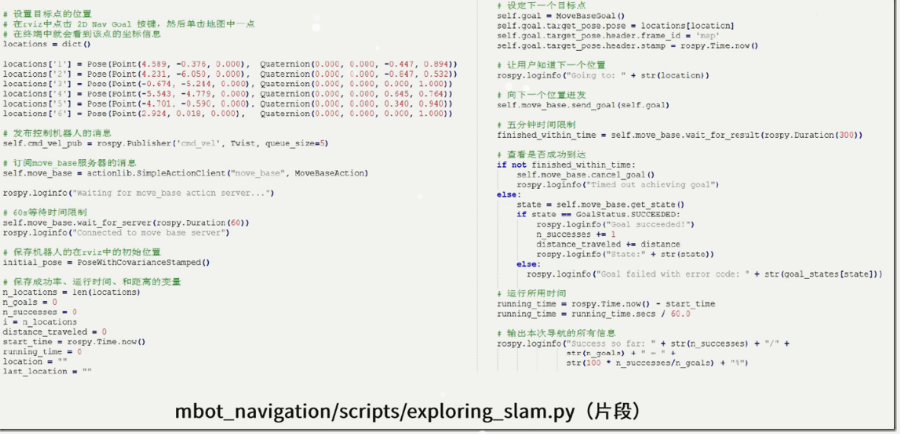
自主设置目标点。
小结
__EOF__

评论(0)
您还未登录,请登录后发表或查看评论