

Ros机械臂仿真建模基础:URDF模型进化版本xacro模型文件语法详细讲解及如何从零构建一个机械臂模型(二)
建立工作空间
打开Terminal,依次运行以下命令创建工作空间:
mkdir -p ~/catkin_ws/src
cd ~/catkin_ws/src
catkin_init_workspace
编译工作空间:
cd ~/catkin_ws/
catkin_make
设置环境变量:
source devel/setup.bash
创建功能包
运行以下命令:
cd ~/catkin_ws/src
catkin_create_pkg Robot_Arm rospy roscpp
cd ..
catkin_make
source ~/catkin_ws/devel/setup.bash
注意:同一个工作空间下,不允许存在同名功能包;不同工作空间下,允许存在同名功能包。
正式开始机械臂建模
文件结构准备
以上准备工作做好之后,就可以正式开始机械臂建模步骤,首先,在新建立的功能包下,新建launch和urdf两个文件夹(虽然文件夹名称可以自定,但是使用Ros默认文件夹名称命名可避免后续出现不必要的bug),分别存放之后用来启动RosMaster,运行机械臂模型的launch文件(launch文件的详解在个人主页有相关介绍),以及用于机械臂仿真的urdf仿真文件。
cd ~/catkin_ws/src/Robot_Arm
mkdir launch
mkdir urdf
之后分别在两个文件夹内新建空白launch文件与urdf文件
cd urdf
touch Arm_Model.xacro
cd launch
touch Display_Model.launch
机械臂模型文件Arm_Model.xacro
依据上一篇文章关于xacro语法和搭建机器人模型方法的介绍,下面给出已经编写好的一个六轴机械臂(7Links+6Joints)的模型文件,读者可根据上一篇文章的介绍分段学习。
打开Arm_Model.xacro文件,将以下内容复制进去:
<?xml version="1.0"?>
<robot name="marm" xmlns:xacro="http://www.ros.org/wiki/xacro">
<!-- Defining the colors used in this robot -->
<material name="Black">
<color rgba="0 0 0 1"/>
</material>
<material name="White">
<color rgba="1 1 1 1"/>
</material>
<material name="Blue">
<color rgba="0 0 1 1"/>
</material>
<material name="Red">
<color rgba="1 0 0 1"/>
</material>
<!-- Constants -->
<xacro:property name="M_PI" value="3.14159"/>
<!-- link1 properties -->
<xacro:property name="link0_radius" value="0.05" />
<xacro:property name="link0_length" value="0.04" />
<xacro:property name="link0_mass" value="1" />
<!-- link1 properties -->
<xacro:property name="link1_radius" value="0.03" />
<xacro:property name="link1_length" value="0.10" />
<xacro:property name="link1_mass" value="1" />
<!-- link2 properties -->
<xacro:property name="link2_radius" value="0.03" />
<xacro:property name="link2_length" value="0.14" />
<xacro:property name="link2_mass" value="0.8" />
<!-- link3 properties -->
<xacro:property name="link3_radius" value="0.03" />
<xacro:property name="link3_length" value="0.15" />
<xacro:property name="link3_mass" value="0.8" />
<!-- link4 properties -->
<xacro:property name="link4_radius" value="0.025" />
<xacro:property name="link4_length" value="0.06" />
<xacro:property name="link4_mass" value="0.7" />
<!-- link5 properties -->
<xacro:property name="link5_radius" value="0.03" />
<xacro:property name="link5_length" value="0.06" />
<xacro:property name="link5_mass" value="0.7" />
<!-- link6 properties -->
<xacro:property name="link6_radius" value="0.04" />
<xacro:property name="link6_length" value="0.02" />
<xacro:property name="link6_mass" value="0.6" />
<!-- gripper -->
<!-- 夹爪 -->
<xacro:property name="gripper_length" value="0.03" />
<xacro:property name="gripper_width" value="0.01" />
<xacro:property name="gripper_height" value="0.06" />
<xacro:property name="gripper_mass" value="0.5" />
<!-- Gripper frame -->
<xacro:property name="grasp_frame_radius" value="0.001" />
<!-- Macro for inertia matrix -->
<!-- 定义宏macro,宏里的函数名为cylinder_inertial_matrix,参数为"m r h",关于惯性矩阵的宏-->
<xacro:macro name="cylinder_inertial_matrix" params="m r h">
<inertial>
<mass value="${m}" />
<!-- 圆柱体惯性矩阵的标准计算公式 -->
<inertia ixx="${m*(3*r*r+h*h)/12}" ixy = "0" ixz = "0"
iyy="${m*(3*r*r+h*h)/12}" iyz = "0"
izz="${m*r*r/2}" />
</inertial>
</xacro:macro>
<xacro:macro name="box_inertial_matrix" params="m w h d">
<inertial>
<mass value="${m}" />
<!-- 长方体惯性矩阵的标准计算公式 -->
<inertia ixx="${m*(h*h+d*d)/12}" ixy = "0" ixz = "0"
iyy="${m*(w*w+d*d)/12}" iyz = "0"
izz="${m*(w*w+h*h)/12}" />
</inertial>
</xacro:macro>
<!-- / ARM BASE // -->
<!-- 底盘 -->
<!-- base-link可以不需要碰撞检测和惯性矩阵两个模块内容 -->
<link name="base_link">
<visual>
<origin xyz="0 0 0" rpy="0 0 0" />
<geometry>
<box size="0.001 0.001 0.001" />
</geometry>
</visual>
</link>
<joint name="base_joint" type="fixed">
<origin xyz="0 0 ${link0_length/2}" rpy="0 0 0" />
<parent link="base_link"/>
<child link="link0" />
</joint>
<!-- / LINK0 // -->
<link name="link0">
<!-- visual:可视化部分 -->
<visual>
<origin xyz="0 0 0" rpy="0 0 0" />
<geometry>
<cylinder radius="${link0_radius}" length="${link0_length}"/>
</geometry>
<material name="White" />
</visual>
<!-- collision:碰撞检测部分 -->
<!-- collision的物理模型和坐标与visual部分保持一致 -->
<collision>
<origin xyz="0 0 0" rpy="0 0 0" />
<geometry>
<cylinder radius="${link0_radius}" length="${link0_length}"/>
</geometry>
</collision>
<!-- 通过函数名cylinder_inertial_matrix来调用之前定义的用来计算惯性矩阵的宏 -->
<cylinder_inertial_matrix m="${link0_mass}" r="${link0_radius}" h="${link0_length}"/>
</link>
<joint name="joint1" type="revolute">
<parent link="link0"/>
<child link="link1"/>
<origin xyz="0 0 ${link0_length/2}" rpy="0 ${M_PI/2} 0" />
<axis xyz="-1 0 0" />
<!-- 关节限制 -->
<!-- effort:关节受力极限 -->
<!-- velocity:最大速度 -->
<!-- lower/upper:最大旋转角度(弧度制) -->
<limit effort="300" velocity="1" lower="${-M_PI}" upper="${M_PI}"/>
</joint>
<!-- / LINK1 // -->
<link name="link1" >
<visual>
<origin xyz="-${link1_length/2} 0 0" rpy="0 ${M_PI/2} 0" />
<geometry>
<cylinder radius="${link1_radius}" length="${link1_length}"/>
</geometry>
<material name="Blue" />
</visual>
<collision>
<origin xyz="-${link1_length/2} 0 0" rpy="0 ${M_PI/2} 0" />
<geometry>
<cylinder radius="${link1_radius}" length="${link1_length}"/>
</geometry>
</collision>
<cylinder_inertial_matrix m="${link1_mass}" r="${link1_radius}" h="${link1_length}"/>
</link>
<joint name="joint2" type="revolute">
<parent link="link1"/>
<child link="link2"/>
<origin xyz="-${link1_length} 0 0.0" rpy="-${M_PI/2} 0 ${M_PI/2}" />
<axis xyz="1 0 0" />
<limit effort="300" velocity="1" lower="${-M_PI}" upper="${M_PI}" />
</joint>
<!-- /// LINK2 // -->
<link name="link2" >
<visual>
<origin xyz="0 0 ${link2_length/2}" rpy="0 0 0" />
<geometry>
<cylinder radius="${link2_radius}" length="${link2_length}"/>
</geometry>
<material name="White" />
</visual>
<collision>
<origin xyz="0 0 ${link2_length/2}" rpy="0 0 0" />
<geometry>
<cylinder radius="${link2_radius}" length="${link2_length}"/>
</geometry>
</collision>
<cylinder_inertial_matrix m="${link2_mass}" r="${link2_radius}" h="${link2_length}"/>
</link>
<joint name="joint3" type="revolute">
<parent link="link2"/>
<child link="link3"/>
<origin xyz="0 0 ${link2_length}" rpy="0 ${M_PI} 0" />
<axis xyz="-1 0 0" />
<limit effort="300" velocity="1" lower="${-M_PI}" upper="${M_PI}" />
</joint>
<!-- / LINK3 / -->
<link name="link3" >
<visual>
<origin xyz="0 0 -${link3_length/2}" rpy="0 0 0" />
<geometry>
<cylinder radius="${link3_radius}" length="${link3_length}"/>
</geometry>
<material name="Blue" />
</visual>
<collision>
<origin xyz="0 0 -${link3_length/2}" rpy="0 0 0" />
<geometry>
<cylinder radius="${link3_radius}" length="${link3_length}"/>
</geometry>
</collision>
<cylinder_inertial_matrix m="${link3_mass}" r="${link3_radius}" h="${link3_length}"/>
</link>
<joint name="joint4" type="revolute">
<parent link="link3"/>
<child link="link4"/>
<origin xyz="0.0 0.0 -${link3_length}" rpy="0 ${M_PI/2} ${M_PI}" />
<axis xyz="1 0 0" />
<limit effort="300" velocity="1" lower="${-M_PI}" upper="${M_PI}" />
</joint>
<!-- /// LINK4 -->
<link name="link4" >
<visual>
<origin xyz="${link4_length/2} 0 0" rpy="0 ${M_PI/2} 0" />
<geometry>
<cylinder radius="${link4_radius}" length="${link4_length}"/>
</geometry>
<material name="Black" />
</visual>
<collision>
<origin xyz="${link4_length/2} 0 0" rpy="0 ${M_PI/2} 0" />
<geometry>
<cylinder radius="${link4_radius}" length="${link4_length}"/>
</geometry>
</collision>
<cylinder_inertial_matrix m="${link4_mass}" r="${link4_radius}" h="${link4_length}"/>
</link>
<!-- revolute:带上下限的旋转关节 -->
<joint name="joint5" type="revolute">
<parent link="link4"/>
<child link="link5"/>
<origin xyz="${link4_length} 0.0 0.0" rpy="0 ${M_PI/2} 0" />
<axis xyz="1 0 0" />
<limit effort="300" velocity="1" lower="${-M_PI}" upper="${M_PI}" />
</joint>
<!-- // LINK5 / -->
<link name="link5">
<visual>
<origin xyz="0 0 ${link4_length/2}" rpy="0 0 0" />
<geometry>
<cylinder radius="${link5_radius}" length="${link5_length}"/>
</geometry>
<material name="White" />
</visual>
<collision>
<origin xyz="0 0 ${link4_length/2} " rpy="0 0 0" />
<geometry>
<cylinder radius="${link5_radius}" length="${link5_length}"/>
</geometry>
</collision>
<cylinder_inertial_matrix m="${link5_mass}" r="${link5_radius}" h="${link5_length}"/>
</link>
<joint name="joint6" type="revolute">
<parent link="link5"/>
<child link="link6"/>
<origin xyz="0 0 ${link4_length}" rpy="${1.5*M_PI} -${M_PI/2} 0" />
<axis xyz="1 0 0" />
<limit effort="300" velocity="1" lower="${-2*M_PI}" upper="${2*M_PI}" />
</joint>
<!-- LINK6 / -->
<link name="link6">
<visual>
<origin xyz="${link6_length/2} 0 0 " rpy="0 ${M_PI/2} 0" />
<geometry>
<cylinder radius="${link6_radius}" length="${link6_length}"/>
</geometry>
<material name="Blue" />
</visual>
<collision>
<origin xyz="${link6_length/2} 0 0" rpy="0 ${M_PI/2} 0" />
<geometry>
<cylinder radius="${link6_radius}" length="${link6_length}"/>
</geometry>
</collision>
<cylinder_inertial_matrix m="${link6_mass}" r="${link6_radius}" h="${link6_length}"/>
</link>
<!-- prismatic:带上下限的直线平移关节 -->
<joint name="finger_joint1" type="prismatic">
<parent link="link6"/>
<child link="gripper_finger_link1"/>
<origin xyz="${link6_length} -0.03 0" rpy="0 0 0" />
<axis xyz="0 1 0" />
<limit effort="100" lower="0" upper="0.06" velocity="0.02"/>
</joint>
<!-- // gripper // -->
<!-- LEFT GRIPPER AFT LINK -->
<link name="gripper_finger_link1">
<visual>
<origin xyz="${gripper_height/2} 0 0" rpy="0 ${M_PI/2} 0" />
<geometry>
<box size="${gripper_length} ${gripper_width} ${gripper_height}" />
</geometry>
<material name="White" />
</visual>
<collision>
<origin xyz="${gripper_height/2} 0 0" rpy="0 ${M_PI/2} 0" />
<geometry>
<box size="${gripper_length} ${gripper_width} ${gripper_height}" />
</geometry>
</collision>
<box_inertial_matrix m="${gripper_mass}" w="${gripper_width}" h="${gripper_height}" d="${gripper_length}"/>
</link>
<joint name="finger_joint2" type="fixed">
<parent link="link6"/>
<child link="gripper_finger_link2"/>
<origin xyz="${link6_length} 0.03 0" rpy="0 0 0" />
</joint>
<!-- RIGHT GRIPPER AFT LINK -->
<link name="gripper_finger_link2">
<visual>
<origin xyz="${gripper_height/2} 0 0" rpy="0 ${M_PI/2} 0" />
<geometry>
<box size="${gripper_length} ${gripper_width} ${gripper_height}" />
</geometry>
<material name="White" />
</visual>
<collision>
<origin xyz="${gripper_height/2} 0 0" rpy="0 ${M_PI/2} 0" />
<geometry>
<box size="${gripper_length} ${gripper_width} ${gripper_height}" />
</geometry>
</collision>
<box_inertial_matrix m="${gripper_mass}" w="${gripper_width}" h="${gripper_height}" d="${gripper_length}"/>
</link>
<!-- Grasping frame -->
<link name="grasping_frame"/>
<joint name="grasping_frame_joint" type="fixed">
<parent link="link6"/>
<child link="grasping_frame"/>
<origin xyz="${gripper_height} 0 0" rpy="0 0 0"/>
</joint>
</robot>
启动模型文件Display_Model.launch文件
打开Display_Model.launch文件,将以下内容复制进去,同样,在个人主页中分为三篇文章详细讲解了launch文件的原理、语法结构及使用方法,供读者参考,以下launch语句有相关注释,可以与主页相应文章的介绍进行对比学习。
<launch>
<arg name="model" />
<!-- 加载机器人模型参数(机器人模型路径保存在robot_description变量中,后续访问这个变量就可以获取该路径) -->
<param name="robot_description" command="$(find xacro)/xacro --inorder $(find Robot_Arm)/urdf/Arm_Model.xacro" />
<!-- 设置GUI参数,显示关节滑动条控制插件 -->
<param name="use_gui" value="true"/>
<!-- 运行joint_state_publisher节点,发布机器人的关节状态(发布关节角度) -->
<node name="joint_state_publisher" pkg="joint_state_publisher" type="joint_state_publisher" />
<!-- 运行robot_state_publisher节点,发布tf坐标系变换 -->
<node name="robot_state_publisher" pkg="robot_state_publisher" type="state_publisher" />
<!-- 运行rviz可视化界面 -->
<node name="rviz" pkg="rviz" type="rviz" args="-d $(find Robot_Arm)/urdf.rviz" required="true" />
</launch>
使用launch文件启动rviz运行仿真文件
经过以上步骤,一个简单的六轴机械臂的建模已经全部完成,接下来只需运行该launch文件即可启动rviz运行仿真文件:
roslaunch Robot_Arm Display_Model.launch
首次启动后的rviz界面可能如下图所示,没有出现机械臂模型:
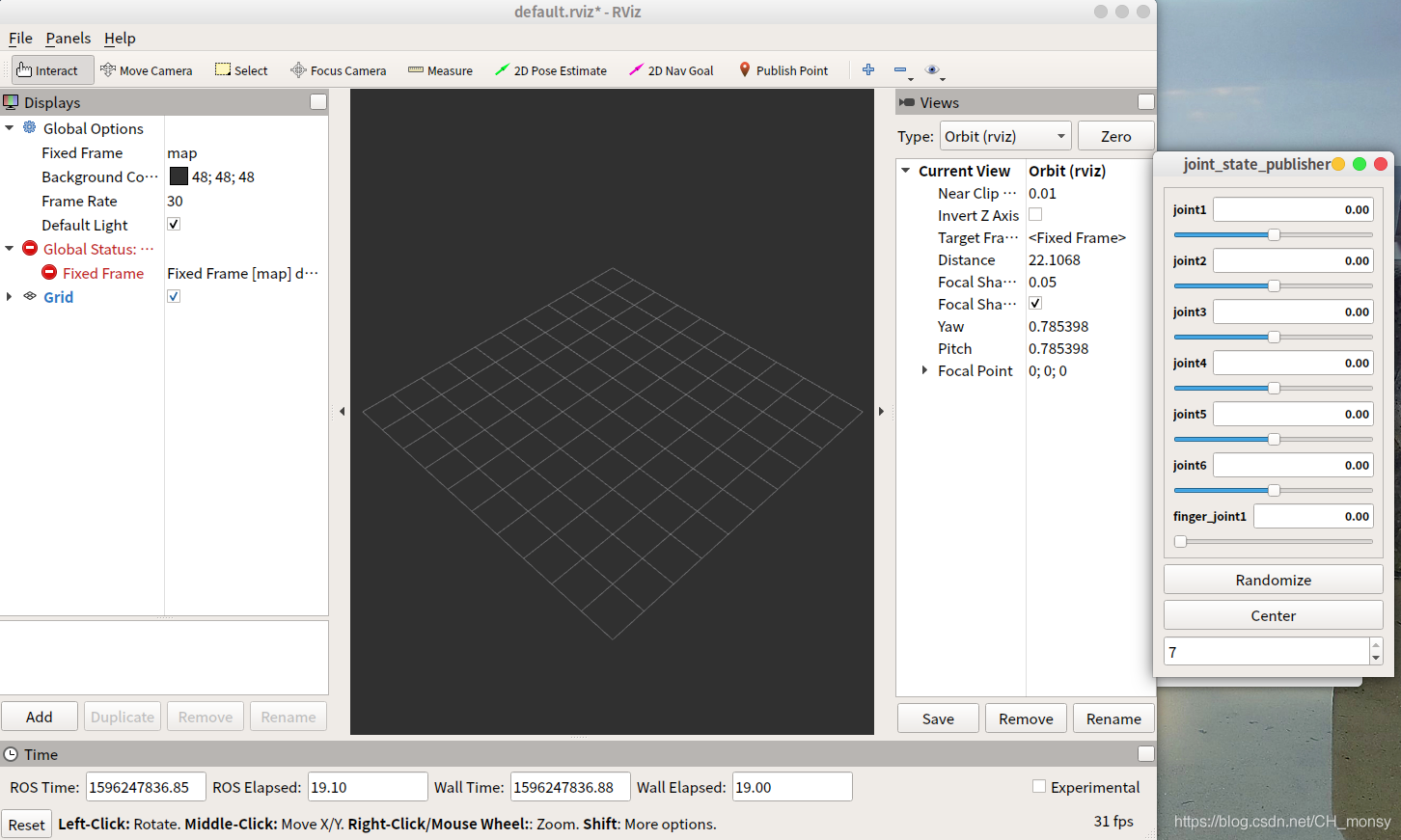
这时我们需要进行相关选项的设置
在左边Display选项栏中点击Global Options–Fixed Frame选中下拉栏选项中的base_link,这样模型会从底盘坐标开始在模拟器中进行显示;
点击左下方Add按钮,找到RobotModel选项双击后,rviz便会导入launch文件中已保存机器人模型文件的参数robot_description,找到并启动机器人模型。
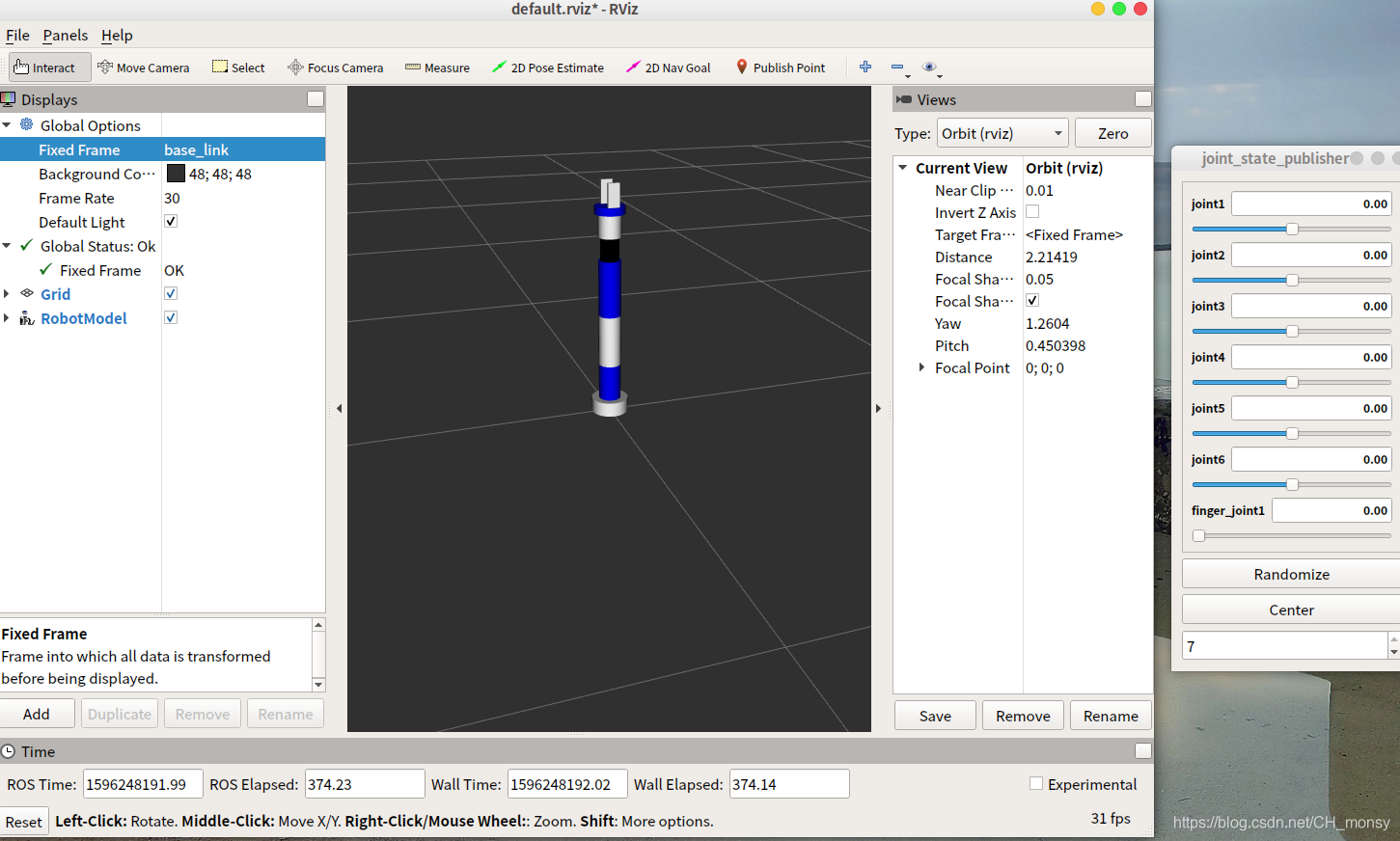
至此,我们就完成了如何在Ros中从零搭建起一个完整的六轴机械臂模型,后续我们可以根据rviz中的更多组件和功能包进行仿真开发,以及结合Gazebo完成机器人与世界模型感知+数据融合测试的相关内容!



评论(0)
您还未登录,请登录后发表或查看评论