

运动规划学习笔记1——探索OMPL
A、OMPL编译与安装
B、OMPL使用
B1、基本定义
B2、路径可视化
B3、API Overview
C、代码附录
C1、Geometric Planning for a Rigid Body in 3D
C2、有效性检查方式
C3、采样方式
1 已有采样器
2 自定义采样器
在这里分享了运动规划方面的一些知识,属于《路径规划算法学习笔记》系列的扩展系列,其中内容可能存在不完善和错误之处,如有读者发现,欢迎批评指正。
A、OMPL编译与安装
方式一:通过官网下载install-ompl-ubuntu.sh文件,运行后,自动编译安装 https://ompl.kavrakilab.org/installation.html,此方法在使用库文件时,cmakeconfig文件可能有问题,还是建议方法二。
方式二:通过Github下载源码,自己编译安装, https://github.com/ompl/ompl,
检查安装成功 及 ROS中使用 https://blog.csdn.net/zghforever/article/details/106688410
官方教程 https://ompl.kavrakilab.org/tutorials.html
B、OMPL使用
B1、基本定义
求解方式
求解问题的过程中,根据是否使用ompl::geometric::SimpleSetup类,有两种方式,简单规划和完整规划,见代码部分C1。
求解过程:利用OMPL提供的类和方法来规划,基本过程包括以下几个部分
♥ 确认实际问题的状态空间 (如SE(3))
♥ 从OMPL提供的类中构建一个状态空间(如ompl::base::SE3StateSpace is appropriate)
♥ 设置状态空间的边界
♥ 定义状态有效性的判断方法
♥ 定义起点和终点的状态
♥ 求解和可视化
状态与状态空间
//状态与状态空间的基本定义
ompl::base::StateSpacePtr space(new T());
ompl::base::ScopedState<> state1(space); //直接通过状态空间StateSpace初始化
ompl::base::SpaceInformationPtr si(space);
ompl::base::ScopedState<T> state2(si); //通过SpaceInformation初始化
//举个栗子
ompl::base::StateSpacePtr space(new ompl::base::SE2StateSpace());
ompl::base::ScopedState<ompl::base::SE2StateSpace> state(space);
state->setX(0.1);
state->setY(0.2);
state->setYaw(0.0);
ompl::base::ScopedState<> backup = state; //state == backup, backup本质是State*, 作用是备份参数, 因此setX()等函数无效
//状态空间的合并
//合并方式1
ompl::base::CompoundStateSpace *cs = new ompl::base::CompoundStateSpace(); //利用CompoundStateSpace类来添加不同状态空间
cs->addSubspace(ompl::base::StateSpacePtr(new ompl::base::SO2StateSpace()), 1.0);
cs->addSubspace(ompl::base::StateSpacePtr(new ompl::base::SO3StateSpace()), 1.0);
ompl::base::StateSpacePtr space(cs);
//合并方式2
// define the individual state spaces
ompl::base::StateSpacePtr so2(new ompl::base::SO2StateSpace());
ompl::base::StateSpacePtr so3(new ompl::base::SO3StateSpace());
ompl::base::StateSpacePtr space = so2 + so3;
//虽然空间可以混合,但对于状态仍然需要指定具体的类型
ompl::base::ScopedState<ompl::base::CompoundStateSpace> state(space);
state->as<ompl::base::SO2StateSpace::StateType>(0)->setIdentity();
- 有效性检查
OMPL不提供具体检查方式,需要根据具体的问题具体确定。用户指定有效性检查的方式有两种,见代码部分C2
♥ 继承OMPL定义的两个抽象类
♥ 直接定义有效性检查函数// 方法2:直接定义判断函数 bool myStateValidityCheckerFunction(const base::State *state) { return ...; } //方法2:使用 base::SpaceInformationPtr si(space); si->setStateValidityChecker(myStateValidityCheckerFunction); si->setStateValidityCheckingResolution(0.03); // 3% si->setup(); - 采样
采样的两种方式:基于ompl::base::StateSampler和基于ompl::base::ValidStateSampler。
♥ 基于ompl::base::StateSampler:生成状态空间的一个状态,生成状态附近的一个状态,生成高斯分布的一组状态。
♥ 基于ompl::base::ValidStateSampler:以ompl::base::StateSampler为基础,不断采样,直到采到一个有效状态或者到达迭代最大值,有效性通过ompl::base::SpaceInformation::isValid判断。
♥ OMPL提供了几个继承自ompl::base::ValidStateSampler的类,如下,可以使用这些类或继承ompl::base::ValidStateSampler重新编写采样器,基本使用方法如下,具体代码与解释见代码部分C3。
-
//基本使用方式 //***************************定义状态分配器(函数)*************************** ompl::base::ValidStateSamplerPtr allocOBValidStateSampler(const ompl::base::SpaceInformation *si) { // we can perform any additional setup / configuration of a sampler here, // but there is nothing to tweak in case of the ObstacleBasedValidStateSampler. return std::make_shared<ompl::base::ObstacleBasedValidStateSampler>(si); } //***************************使用*************************** ss.getSpaceInformation()->setValidStateSamplerAllocator(allocOBValidStateSampler); - B2、路径可视化
OMPL不提供路径可视化工具,直接一点的方式是作为矩阵打印输出,保存成文本文件。
OMPL提供两种路径:ompl::geometric::PathGeometric 和 ompl::control::PathControl,两个类可用成员函数printAsMatrix()打印,前者每行打印一个状态,后者每行除了状态,还有控制指令和控制间隔时间。
打印方式如下:
B3、API Overviewbool solved = ss.solve(20.0); if (solved) { // if ss is a ompl::geometric::SimpleSetup object ss.getSolutionPath().printAsMatrix(std::cout); // if ss is a ompl::control::SimpleSetup object ss.getSolutionPath().asGeometric().printAsMatrix(std::cout); } 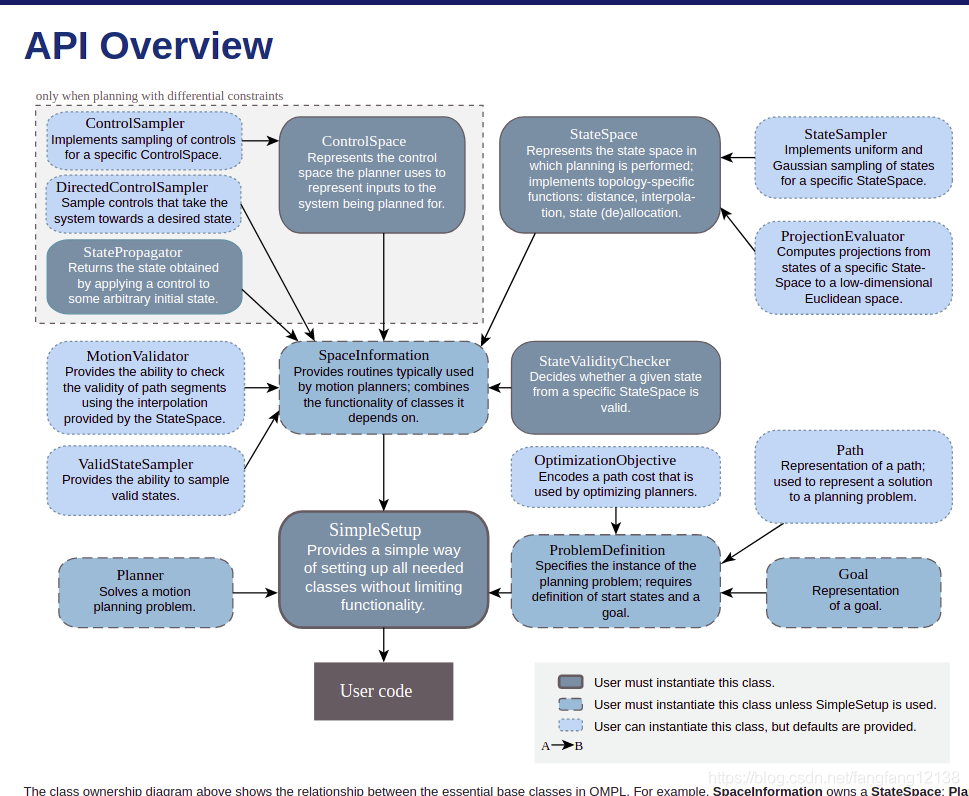
- C、代码附录C1、Geometric Planning for a Rigid Body in 3D
-
//注:这是在ROS里面写的,虽然这一部分跟ROS暂时没关系。 #include <ros/ros.h> #include <iostream> #include <ompl/base/spaces/SE3StateSpace.h> //使用ompl::geometric::SimpleSetup类 #include <ompl/geometric/SimpleSetup.h> //不使用ompl::geometric::SimpleSetup类 #include <ompl/base/SpaceInformation.h> #include <ompl/geometric/planners/rrt/RRTConnect.h> namespace ob = ompl::base; namespace og = ompl::geometric; //状态检查函数 bool isStateValid(const ob::State *state) { // cast the abstract state type to the type we expect // 将抽象状态类型转换为我们期望的类型 const auto *se3state = state->as<ob::SE3StateSpace::StateType>(); // extract the first component of the state and cast it to what we expect // 提取状态的第一个组件并将其转换为我们所期望的 const auto *pos = se3state->as<ob::RealVectorStateSpace::StateType>(0); // extract the second component of the state and cast it to what we expect // 提取状态的第二个组件并将其转换为我们所期望的 const auto *rot = se3state->as<ob::SO3StateSpace::StateType>(1); // check validity of state defined by pos & rot // return a value that is always true but uses the two variables we define, so we avoid compiler warnings // 返回一个始终为true但使用我们定义的两个变量的值 return (const void*)rot != (const void*)pos; } //简单规划:使用ompl::geometric::SimpleSetup类 void planWithSimpleSetup() { // 状态空间:构建 auto space(std::make_shared<ob::SE3StateSpace>()); // 状态空间:边界 ob::RealVectorBounds bounds(3); bounds.setLow(-1); bounds.setHigh(1); space->setBounds(bounds); // 配置类:构建 og::SimpleSetup ss(space); // 配置类:设置状态有效性检查器 ss.setStateValidityChecker([](const ob::State *state) { return isStateValid(state); }); // 配置类:设置起终点 ob::ScopedState<> start(space); start.random(); ob::ScopedState<> goal(space); goal.random(); ss.setStartAndGoalStates(start, goal); // this call is optional, but we put it in to get more output information ss.setup(); ss.print(); // attempt to solve the problem within one second of planning time ob::PlannerStatus solved = ss.solve(1.0); if (solved) { std::cout << "Found solution:" << std::endl; // print the path to screen ss.simplifySolution(); ss.getSolutionPath().print(std::cout); } else std::cout << "No solution found" << std::endl; } //完整规划:不使用ompl::geometric::SimpleSetup类 void plan() { // 状态空间:构建 auto space(std::make_shared<ob::SE3StateSpace>()); // 状态空间:边界 ob::RealVectorBounds bounds(3); bounds.setLow(-1); bounds.setHigh(1); space->setBounds(bounds); // 空间信息:构建 auto si(std::make_shared<ob::SpaceInformation>(space)); // 空间信息:设置状态有效性检查器 si->setStateValidityChecker(isStateValid); // 问题实例:构建 auto pdef(std::make_shared<ob::ProblemDefinition>(si)); // 问题实例:设置起终点 ob::ScopedState<> start(space); start.random(); ob::ScopedState<> goal(space); goal.random(); pdef->setStartAndGoalStates(start, goal); // 规划方法:构建 auto planner(std::make_shared<og::RRTConnect>(si)); // 规划方法:实际问题 planner->setProblemDefinition(pdef); // 规划方法:初始化 planner->setup(); // 打印空间信息和问题实例 si->printSettings(std::cout); pdef->print(std::cout); // 求解 ob::PlannerStatus solved = planner->ob::Planner::solve(1.0); if (solved) { // get the goal representation from the problem definition (not the same as the goal state) // and inquire about the found path ob::PathPtr path = pdef->getSolutionPath(); std::cout << "Found solution:" << std::endl; // print the path to screen path->print(std::cout); } else std::cout << "No solution found" << std::endl; } int main(int argc, char** argv) { ros::init(argc, argv, "rigid_body_planning"); ros::NodeHandle nh; std::cout << "OMPL version: " << OMPL_VERSION << std::endl; plan(); std::cout << std::endl << std::endl; planWithSimpleSetup(); return 0; } - C2、有效性检查方式
-
//方法1:继承OMPL定义的抽象类 base::StateValidityChecker class myStateValidityCheckerClass : public base::StateValidityChecker { public: myStateValidityCheckerClass(const base::SpaceInformationPtr &si) : base::StateValidityChecker(si) { } virtual bool isValid(const base::State *state) const { return ...; } }; //方法1:使用 base::SpaceInformationPtr si(space); si->setStateValidityChecker(std::make_shared<myStateValidityCheckerClass>(si)); si->setup(); //方法1:继承OMPL定义的抽象类 base::MotionValidator class myMotionValidator : public base::MotionValidator { public: // implement checkMotion() }; //方法1:使用 base::SpaceInformationPtr si(space); si->setMotionValidator(std::make_shared<myMotionValidator>(si)); si->setup(); // 方法2:直接定义判断函数 bool myStateValidityCheckerFunction(const base::State *state) { return ...; } //方法2:使用 base::SpaceInformationPtr si(space); si->setStateValidityChecker(myStateValidityCheckerFunction); si->setStateValidityCheckingResolution(0.03); // 3% si->setup(); - C3、采样方式
1 已有采样器
不能直接在SimpleSetup或者SpaceInformation类中配置采样方式,需要通过定义下面类型的函数,输入ompl::base::SpaceInformation,返回ompl::base::ValidStateSamplerPtr。
//***************************定义状态分配器(函数)*************************** ompl::base::ValidStateSamplerPtr allocOBValidStateSampler(const ompl::base::SpaceInformation *si) { // we can perform any additional setup / configuration of a sampler here, // but there is nothing to tweak in case of the ObstacleBasedValidStateSampler. return std::make_shared<ompl::base::ObstacleBasedValidStateSampler>(si); } //***************************使用*************************** ss.getSpaceInformation()->setValidStateSamplerAllocator(allocOBValidStateSampler); -
2 自定义采样器
继承ompl::base::ValidStateSampler重新编写采样器,继承后的类与OMPL提供的类的使用方法相同。
-
//***************************定义子类*************************** namespace ob = ompl::base; namespace og = ompl::geometric; // This is a problem-specific sampler that automatically generates valid // states; it doesn't need to call SpaceInformation::isValid. This is an // example of constrained sampling. If you can explicitly describe the set valid // states and can draw samples from it, then this is typically much more // efficient than generating random samples from the entire state space and // checking for validity. class MyValidStateSampler : public ob::ValidStateSampler { public: MyValidStateSampler(const ob::SpaceInformation *si) : ValidStateSampler(si) { name_ = "my sampler"; } // Generate a sample in the valid part of the R^3 state space // Valid states satisfy the following constraints: // -1<= x,y,z <=1 // if .25 <= z <= .5, then |x|>.8 and |y|>.8 bool sample(ob::State *state) override { double* val = static_cast<ob::RealVectorStateSpace::StateType*>(state)->values; double z = rng_.uniformReal(-1,1); if (z>.25 && z<.5) { double x = rng_.uniformReal(0,1.8), y = rng_.uniformReal(0,.2); switch(rng_.uniformInt(0,3)) { case 0: val[0]=x-1; val[1]=y-1; break; case 1: val[0]=x-.8; val[1]=y+.8; break; case 2: val[0]=y-1; val[1]=x-1; break; case 3: val[0]=y+.8; val[1]=x-.8; break; } } else { val[0] = rng_.uniformReal(-1,1); val[1] = rng_.uniformReal(-1,1); } val[2] = z; assert(si_->isValid(state)); return true; } // We don't need this in the example below. bool sampleNear(ob::State* /*state*/, const ob::State* /*near*/, const double /*distance*/) override { throw ompl::Exception("MyValidStateSampler::sampleNear", "not implemented"); return false; } protected: ompl::RNG rng_; }; //***************************定义状态分配器(函数)*************************** ob::ValidStateSamplerPtr allocMyValidStateSampler(const ob::SpaceInformation *si) { return std::make_shared<MyValidStateSampler>(si); } //***************************使用*************************** ss.getSpaceInformation()->setValidStateSamplerAllocator(allocMyValidStateSampler);



评论(0)
您还未登录,请登录后发表或查看评论