

项目实战——基于计算机视觉的物体位姿定位及机械臂抓取(双目标定)
请各位读者朋友注意,这里面很多东西涉及到我的毕设,写作辛苦,请勿滥用,转载请务必注明出处!
双目标定的目的是计算两个摄像机的相对位姿信息,并进行矫正,使得两台摄像机处于完全平行的状态。下面建立双摄像机模型,将相机相对位姿用数学表达式表达出来,并进行求解。
对极几何
对极几何是双视图几何学理论的一部分,通常情况下,同一场景的两幅图像对应点之间存在着特殊的几何关系。这种关系仅取决于摄像机的内参数和两摄像机之间的相对位姿。
1、极线约束
对于单一的摄影机观测3D点w的情况,如图所示,w必定位于一条穿过光心和摄像机平面中 x 1的光线上。
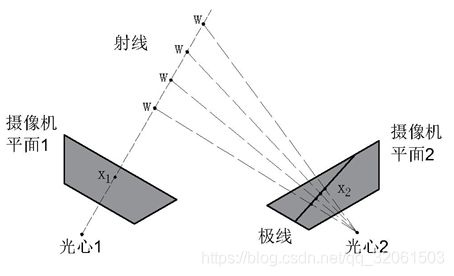
但是,并不能确定该点位于这条射线上的具体位置(图纸标记了四个可能的位置)。现在考虑观测同一个3D点的第二个摄像机,从第一个摄像机可得,该点必定位于3D空间中的一条特定光线上,因此第二幅图像中该点的投影位置 x 2 x_2 x
必定唯一在第二幅图像中这条光线投影上的某个位置上。真实物理世界中的光线在二维平面中的投影称为极线。
综上可以得出这样一个结论:对于第一幅图像中的任意点,它在第二幅图象中的对应点一定会在一条线上。这就是极线约束。该受约束的特定极线依赖于摄像机的内参数和外参数。
极线约束具有两个重要的实际意义:
1) 在已知摄像机焦距、偏移量和相机间相对位姿的情况下,对于左视图中的二维像素点,只需在右摄像机拍摄图像中的极线进行一维搜索,即可得到该点在第二幅图像上的对应点位置。
2) 对应点的约束是摄像机内在参数和外在参数的函数,已知摄像机内在参数的情况下,可利用对应点的观测模式来确定摄像机的外在参数,进而确定两台摄像机的相对位姿。
2、极点
在极线约束的基础上从另一个方面考量,第一幅图像中的每一个点都是物理世界中的一条光线的投影,而这些光线同时又在第二幅图像上投影形成极线。由于所有光线都聚集到摄像机1的光心,那么,所有光线在第二幅图像中形成的极线也将聚集于一点。该点即为摄像机1的光心在摄像机2中的对应点,也称极点。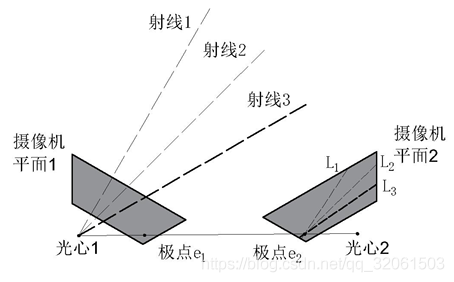
当然,极点并不一定在观测的图像内部,也有可能在图像之外的某一点上,下图描述了两种极端的情况:
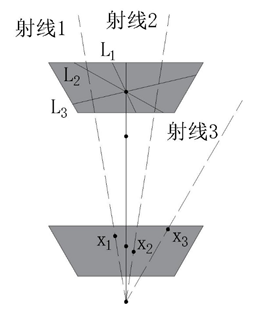
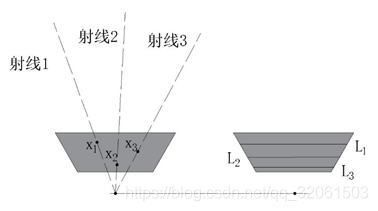
当两台摄像机位于一条直线上时,极点位于图像中心,且极线呈放射状分布;当两台摄像机都位于同一方向且垂直于光轴,此时极线都是互相平行的,而极点位于无穷远处。
以上即为对极几何的主要内容,它对于计算摄像机相对位姿信息(求解摄像机外参数),进行立体匹配(寻找对应点)具有重要的作用。
基础矩阵与实矩阵
为了研究方便,在研究双摄像机时,假定第一个摄像机为世界坐标的坐标中心,因此第一个摄像机的外在参数为:{I,0}。第二个摄像机处于任意位置。这样,在齐次坐标中,一个3D点投影到两个摄像机上,可表示为: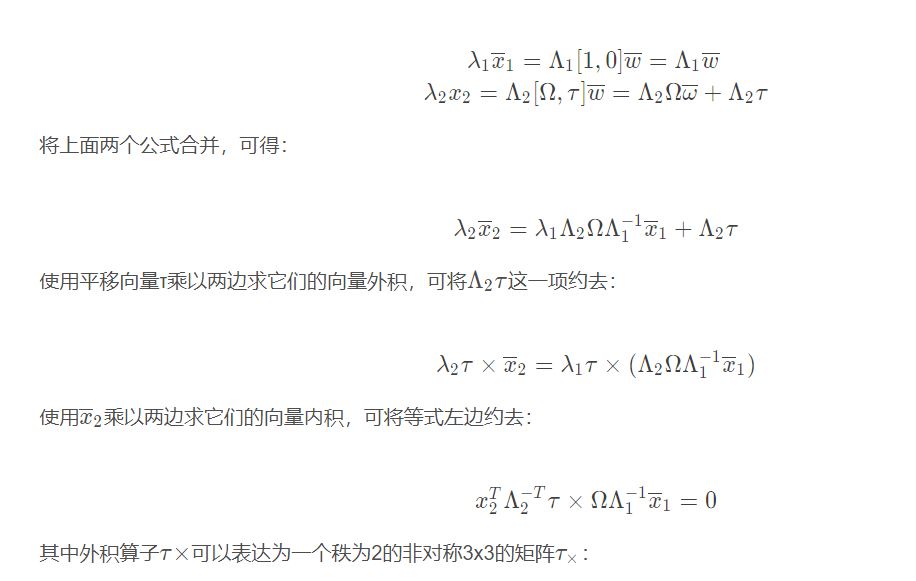



造成八点算法不稳定的原因主要在于系数矩阵A, A直接使用的是原图像的像素坐标,没有经过任何处理,而每个像素点坐标分量的数量级相差太大,这就造成了矩阵A的不稳定。因此,在带入矩阵进行计算之前,首先要对像素坐标进行归一化处理,这样就可以消除数量级不同引起的巨大误差,提高矩阵A的稳定性。处理方法主要是对原始图像坐标进行同向性变换。
归一化处理主要分为两步:
1、变换选定像素点的位移,使得像素点集与原图像的原点重合;
2、对图像点进行放缩变换,使他们到原点的平均距离为√2。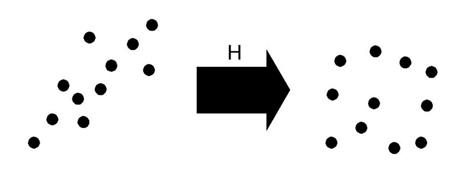
上图形象地描述了归一化处理的过程:左侧为原始图像点,右侧为处理后的点,其中H为归一化变换的矩阵,可表示为:
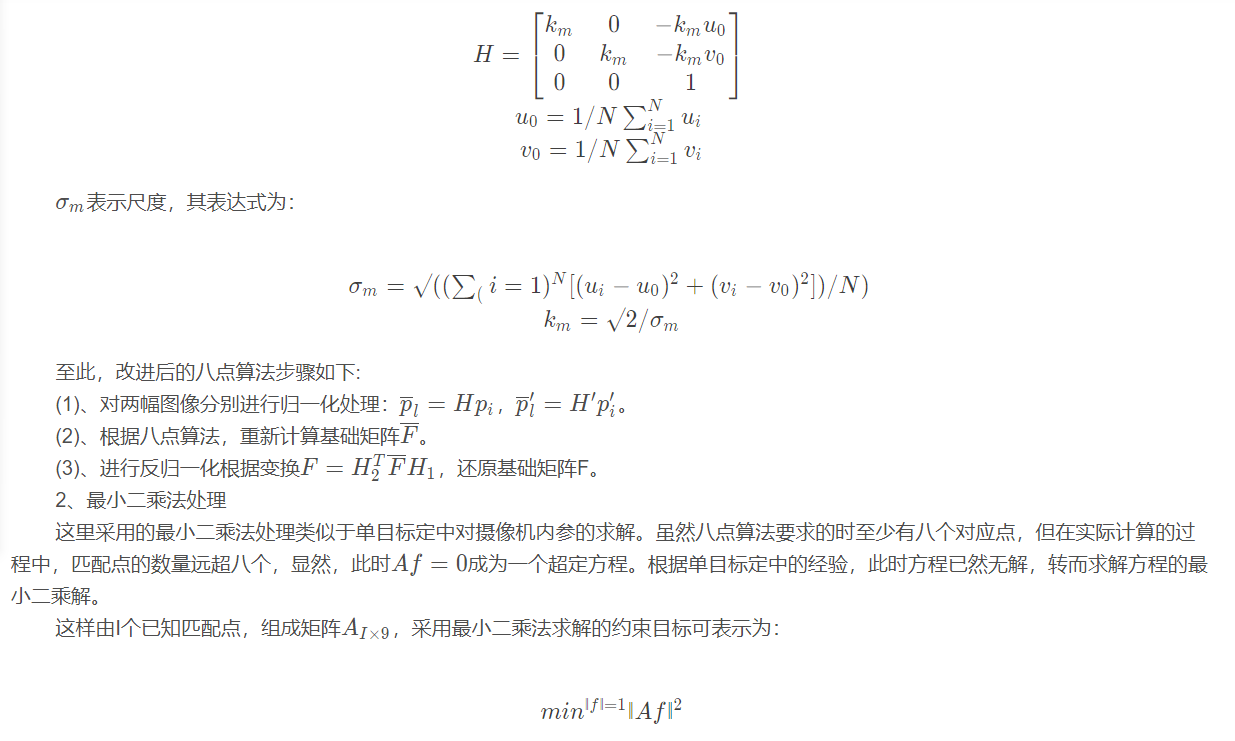
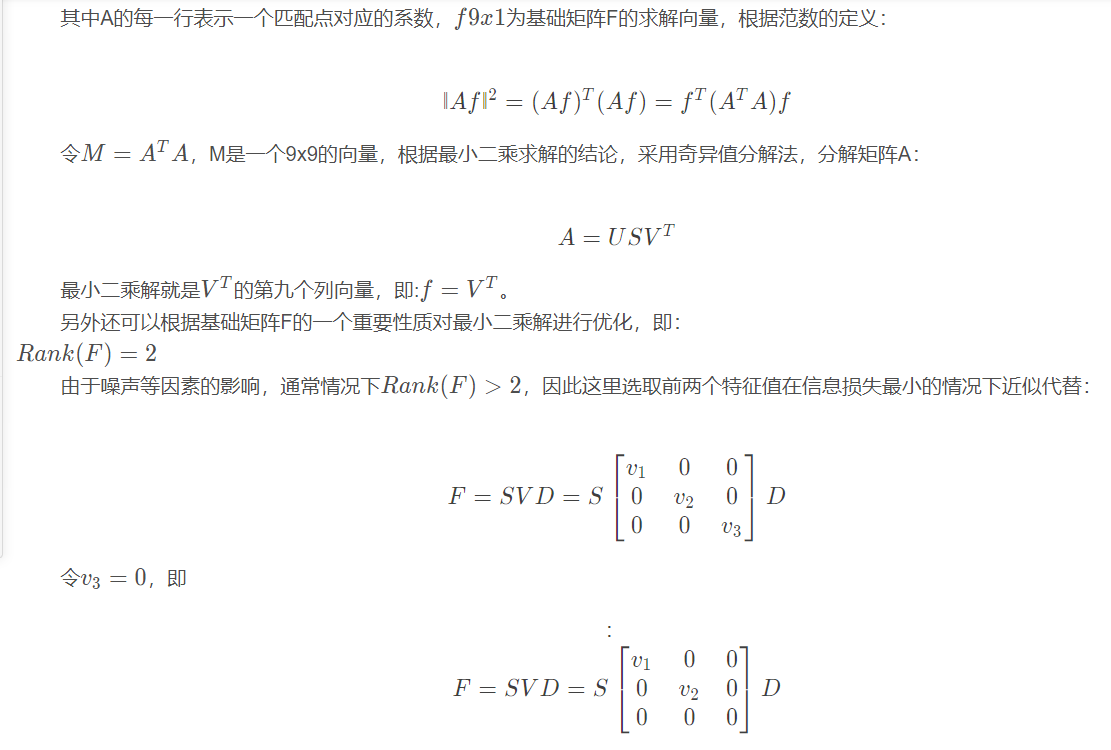
上述求得的F即为最终得到的基础矩阵。
3、随机采样一致性(RANdom SAmple Consensus,RANSAC)
通过两个摄像机的图像估计基础矩阵,唯一的输入来源就是匹配好的对应的点。在实际计算时,匹配点一定会存在误差,这种误差一般有以下两种情况:
(1)测量点位置不精确引起的系统误差,这种误差服从高斯分布。
(2)匹配点错误(错误的匹配点也称外点)引起的误差,这种误差不服从高斯分布。
在计算的过程中,错误的匹配点能够造成极大的误差。对于外点,即使只有一组,也会造成很大的影响。因此,需要通过一种方法剔除外点,筛选出正确的匹配点(也称内点)。这种方法就是随机采样一致性(RANSAC)。
该方法适用于外点较多时的情况(当外点较少时,可以采用最小二乘法来确定)。它的基本假设主要有两条:
(1)数据中包含有内点,且内点数据符合某种数学分布;
(2)外点并不符合内点的数学分布,一般是无规律的,其产生原因主要有:数据噪声、计算错误、测量错误等;
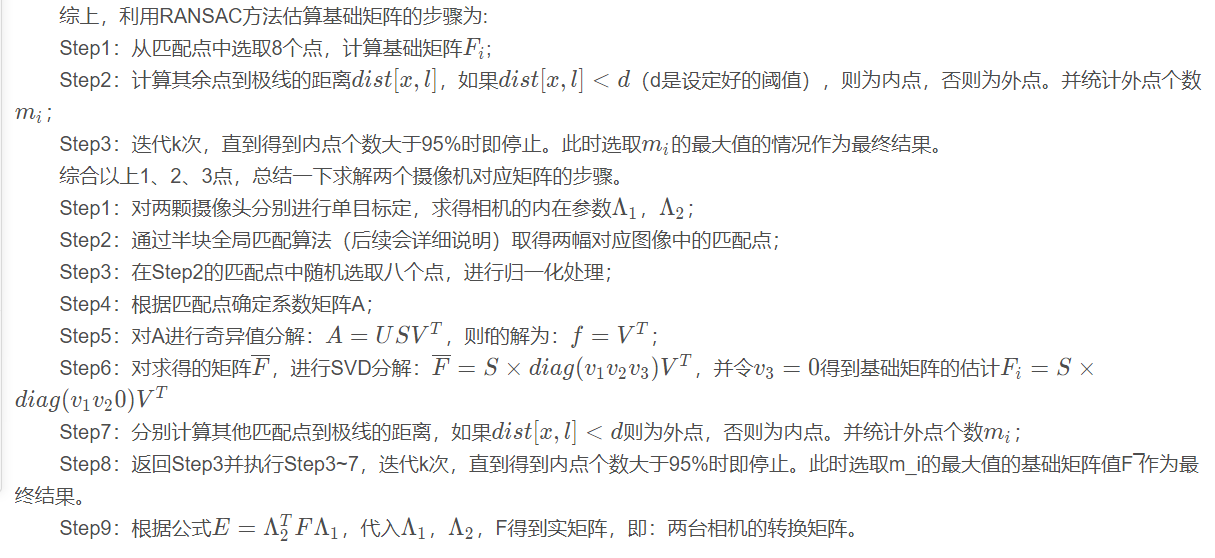
下面给出RANSAC的算法:
Step1:假设共有N个数据组成的集合P,集合P包含了内点和外点,并至少可以通过n个点拟合出模型;
Step2:从集合P中随机选取n个点构成集合p;
Step3:根据集合p估计出数学模型M;
Step4:对剩余N-n个点分别判断是否适用模型M,适用的为内点,否则为外点,并统计内点的个数m_i。
Step5:重复Step2~Step4步骤k次,并选取m_i最大(即:内点最多)的情况作为最终结果。
该算法的核心是对于k值的选取。k值过小,则会对内点、外点估计错误;k值过大,则会增加计算工作量。实际上,可以通过理论计算来推断k值。Step2每次从集合P中选取n个点,假设选取到内点的概率为ϖ,则:
ϖ = 内 点 数 目 / 数 据 集 数 目 ϖ=内点数目/数据集数目 ϖ=内点数目/数据集数目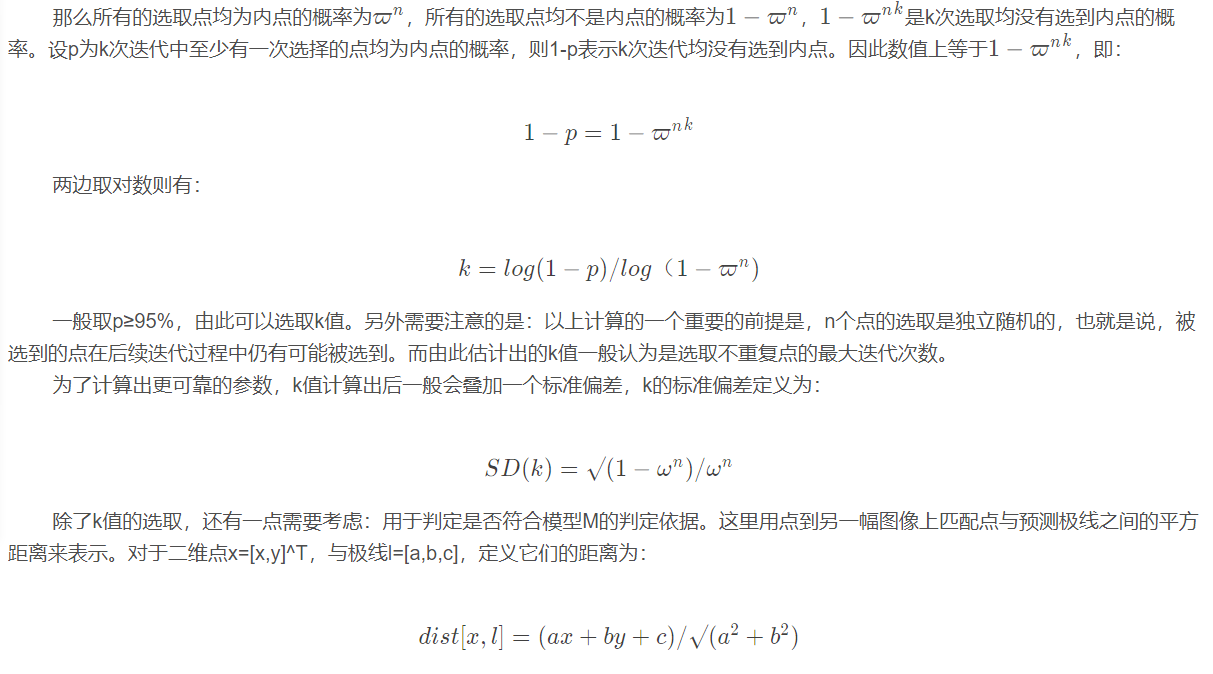
立体矫正
通过计算出本征矩阵,并得到摄像机的相机转换矩阵后,根据2.1的基本原理,通过两个摄像机计算视深的前提是两个摄像机必须保证绝对的平行。因此下一步任务就是:使得两个摄像机的光轴完全平行,将摄像机所拍摄图像转换成完全平行摄像机所拍摄的图像。这一步也称为立体校正。
在上图中,由于极线是相互平行的,因此三维世界的点在左右像面成的像高度是一致的。后面在进行立体匹配时,只需要在同一行上进行搜索即可,这样匹配效率就会大大提高。
本文采用Bouguet算法对图像进行立体校正,该算法的效果是:使左右视图中每幅图像的重投影畸变最小化,同时使视图的公共视野最大化。
主要思路是:将旋转矩阵R在两个摄像机之间分为两半(如果单纯旋转右侧摄像机与左侧平行,或者旋转左侧摄像机与右侧平行,那么它们的光轴方向就会发生很大的偏移,会使图像重投影畸变较大,因此折中的方法就是两侧都旋转一半,这样就可以最小化图像重投影畸变)。这里分别将左右摄像机的合成旋转矩阵称为 r l, r r 。将每个摄像机旋转二分之一,则它们的光轴最终平行于原始光轴所指的矢量和。需要注意的是,这样做会将两个摄像机设置为共面而非行对准。
定义矩阵 R r e c t 为左摄像机的变换矩阵,目的是将其极线变为水平,且极点移至无穷远处。为了计算该矩阵,设图像主点 ( c x , c y ) 为原极点方向,则归一化后的极点方向为两台摄像机投影中心之间的平移矢量方向,这里构造一个由极点 ( e 1 ) ⃗ 方向开始的旋转矩阵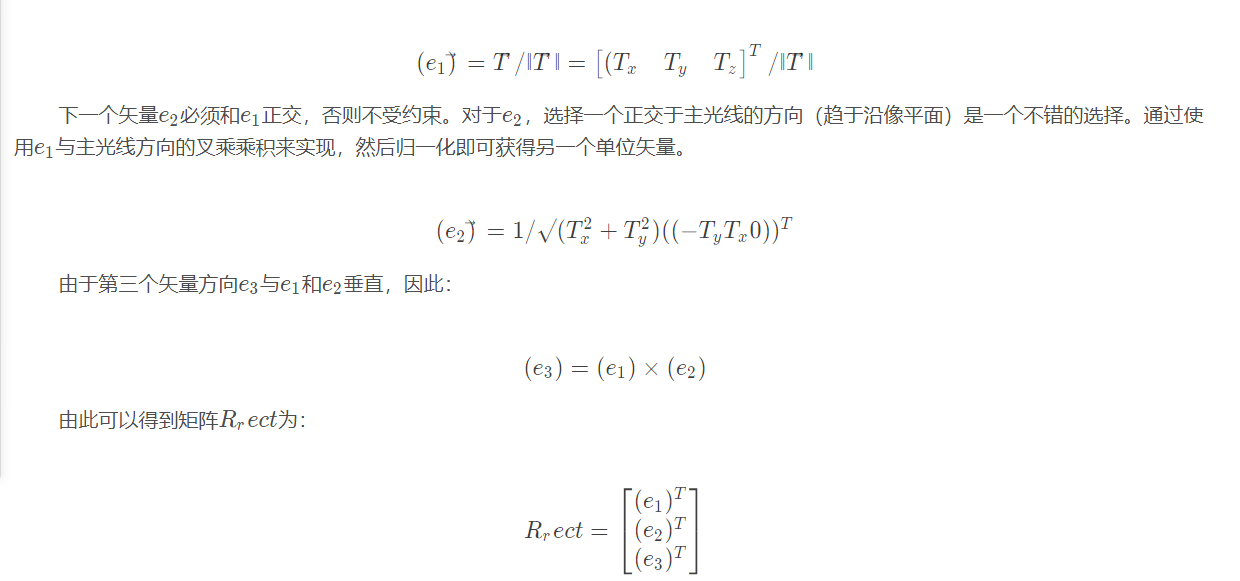
OpenCV双目标定
上面详细阐述了双目标定的具体算法,下面详细阐述其具体操作方法。
OpenCV提供了双目标定的实现。本文采用的C++语言开发,IDE为VS2015,OpenCV版本为4.0版本。以下介绍其主要实现函数:
1、双目标定
double cv :: stereoCalibrate (
InputArrayOfArrays objectPoints,
InputArrayOfArrays imagePoints1,
InputArrayOfArrays imagePoints2,
InputOutputArray cameraMatrix1,
InputOutputArray distCoeffs1,
InputOutputArray cameraMatrix2,
InputOutputArray distCoeffs2,
Size imageSize,
OutputArray R,
OutputArray T,
OutputArray E,
OutputArray F,
INT flags = CALIB_FIX_INTRINSIC,
TermCriteria standard =TermCriteria(TermCriteria::COUNT+TermCriteria::EPS, 30, 1e-6)
/*
objectPoints 储存标定角点在世界坐标系中的位置;
imagePoints1、imagePoints2 摄像机1、2的棋盘角点像素坐标;
cameraMatrix1 左摄像机的内参矩阵;
distCoeffs1 左摄像机的畸变系数矩阵;
cameraMatrix2 右摄像机的内参矩阵;
distCoeffs2 右摄像机的畸变系数矩阵;
imageSize 图像的大小;
R,左右摄像机的旋转矩阵;
T,左右摄像机的平移矩阵;
E,本征矩阵;
F,基本矩阵;
Flag 可能为零的不同标志或以下值的组合:
CV_CALIB_FIX_INTRINSIC固定输入的cameraMatrix和distCoeffs不变,这样只估算R,T,E和F矩阵。
CV_CALIB_USE_INTRINSIC_GUESS以单目标定的相机内参和畸变系数为初始值进行迭代。
CV_CALIB_FIX_PRINCIPAL_POINT 不改变图像原点。
CV_CALIB_FIX_FOCAL_LENGTH迭代过程中不会改变焦距
CV_CALIB_ZERO_TANGENT_DIST不考虑两台摄像机的切向畸变系数。
CALIB_THIN_PRISM_MODEL计算系数s1,s2,s3和s4。
CALIB_TILTED_MODEL系数tauX和tauY已启用。
/
2、根据观察到的点坐标计算理想点坐标
void cv :: undistortPoints (
InputArray src,
OutputArray dst,
InputArray cameraMatrix,
InputArray distcoeffs,
InputArray R = noArray(),
InputArray P =noArray()
)
/
src, 观察到的点坐标
dst,在非畸变和反向透视变换后输出理想点坐标。
cameraMatrix 相机内参矩阵
distCoeffs 相机畸变矩阵
R - 对象空间中的整流变换(3x3矩阵),如果矩阵为空,则使用身份转换。
P - 新的相机内参矩阵。
/
3、极线计算
void cv :: computeCorrespondEpilines (
InputArray points,
// 输入矩阵。
//包含点的图像索引(1或2)
InputArray F,
//基本矩阵
OutputArray line
//输出的极线参数矩阵
);
4、基本矩阵计算
Mat cv :: findFundamentalMat(
InputArray points1,
//第一幅图像的阵列点。
InputArray points2,
//与points1相同。
Int method = FM_RANSAC,
//用于计算基本矩阵的方法。
/
CV_FM_7POINT用于7点算法。ñ= 7
CV_FM_8POINT通用的8点算法。ñ≥ 8
用于RANSAC算法的 CV_FM_RANSAC。ñ≥ 8
CV_FM_LMEDS为LMedS算法。ñ≥ 8
/
double param1 = 3.0,
//用于随机一致性采样的参数。用于判断是否为噪点的阈值
double param2 = 0.99,
//用于随机一致性采样和LM算法的参数,表示置信水平
OutputArray mask =noArray()
)
5、计算校准立体相机的每个摄像机的校正变换
void cv :: stereoRectify (
InputArray cameraMatrix1,
InputArray distCoeffs1,
InputArray cameraMatrix2,
InputArray distCoeffs2,
Size imageSize,
InputArray R,
InputArray T,
OutputArray R1,
OutputArray R2,
OutputArray P1,
OutputArray P2,
OutputArray Q:
Int flags = CALIB_ZERO_DISPARITY,
double alpha = -1,
Size newImageSize = Size(),
Rect * validPixROI1 = 0,
Rect * validPixROI2 =0
)
/
cameraMatrix1– 第一个相机矩阵.
distCoeffs1– 第一个相机畸变参数.
cameraMatrix2
distCoeffs2
imageSize– 用于校正的图像大小;
R–旋转矩阵;
T– 平移矩阵;
R1、R2–矫正旋转矩阵;
P1、P2–投影矩阵(3x4);
Q–输出深度视差映射矩阵
Flags-操作标志一般设为CV_CALIB_ZERO_DISPARITY,也可设置为0。
Alpha-自由缩放参数。
validPixROI1/ validPixROI2 -如果选择,则会输出矩形。
/
6、计算无畸变和裁剪后的转换图
void cv :: initUndistortRectifyMap(
InputArray cameraMatrix,
InputArray distcoeffs,
InputArray R,
InputArray newCameraMatrix,
Size size,
Int m1type,
OutputArray map1,
OutputArray map2
)
/
cameraMatrix——摄像机内参矩阵
distCoeffs——摄像机畸变系数矩阵
R——两台摄像机之间的旋转矩阵
newCameraMatrix——校正后的摄像机内参矩阵
size——摄像机采集的无畸变图像尺寸
m1type——map1的数据类型
map1——输出的X坐标重映射参数
map2——输出的Y坐标重映射参数
*/
在本文程序中,双目标定写成了一个单独的.c文件,名称为StereoCalib,其主函数为:
result *StereoCalib(
int board_w, //棋盘的宽度
int board_h, //棋盘的高度
cv::Mat M1,
cv::Mat D1,
cv::Mat M2,
cv::Mat D2,
const char *imageList, //图像文件列表
bool useUncalibrated, //是否使用未校准方法
bool displayCorners, //是否显示角点
bool showUndistores, //是否显示校正后的图像
bool isVerticalStereo //判断图像是垂直还是水平
)
双目标定利用的是单目标定时所拍摄的图像,即:在单目标定时,当检测到棋盘图案时,左摄像机和右摄像机同时拍摄。经过双目标定,校正并对应后的图像如图所示: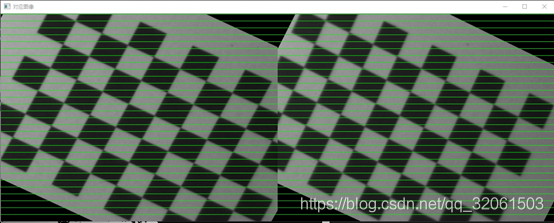
图像中包括左右摄像机拍摄棋盘图像经过单目标定、双目标定、裁剪后的对应图案,图中绿线即为极线(极点位于无穷远处),重映射平均误差为1.75537。
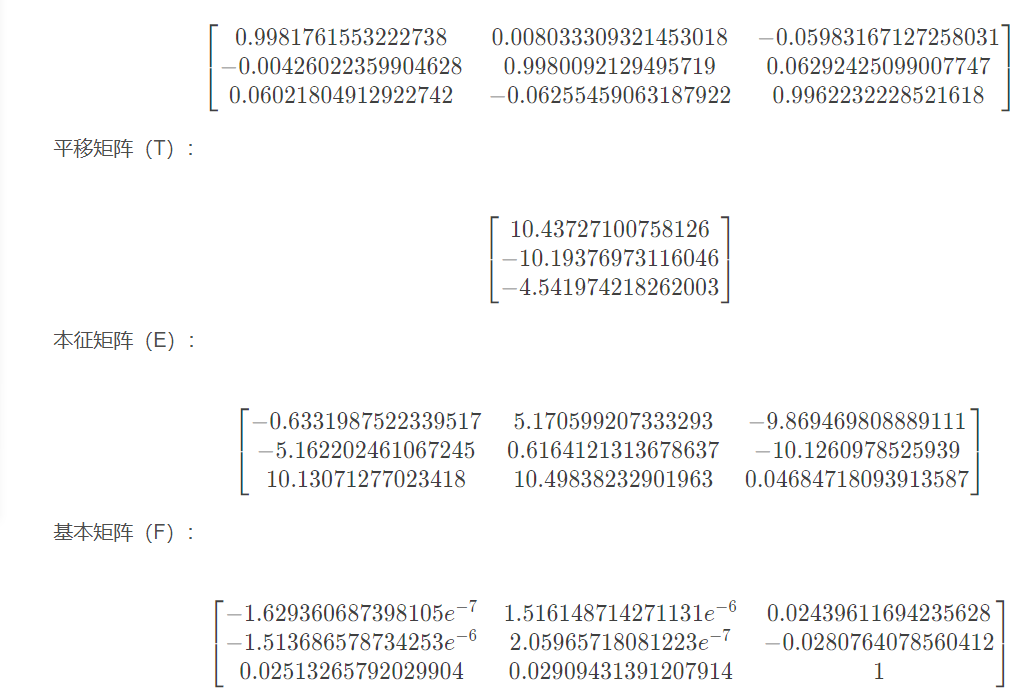
经过计算,双目相机的R、T、E、F四个参数分别为:
旋转矩阵(R):
PS:再次请各位读者朋友注意,这里面很多东西涉及到我的毕设,写作辛苦,请勿滥用,转载请务必注明出处!
————————————————
版权声明:本文为CSDN博主「Hunt Tiger Tonight」的原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接及本声明。
原文链接:https://blog.csdn.net/qq_32061503/article/details/102825439


评论(0)
您还未登录,请登录后发表或查看评论