
webots版本2020b1+ros2版本foxy,案例可以在windows和linux下使用。
版本号对应(只列最新两版本):
- webots 2020b1 - ros2 foxy 202010 - webots_ros2 1.0.3
- webots 2021a - ros2 foxy 202012 - webots_ros2 1.0.5
查看系统中ROS相关环境变量:
- linux:
printenv | grep -i ROS - windows:
set | findstr -i ROS

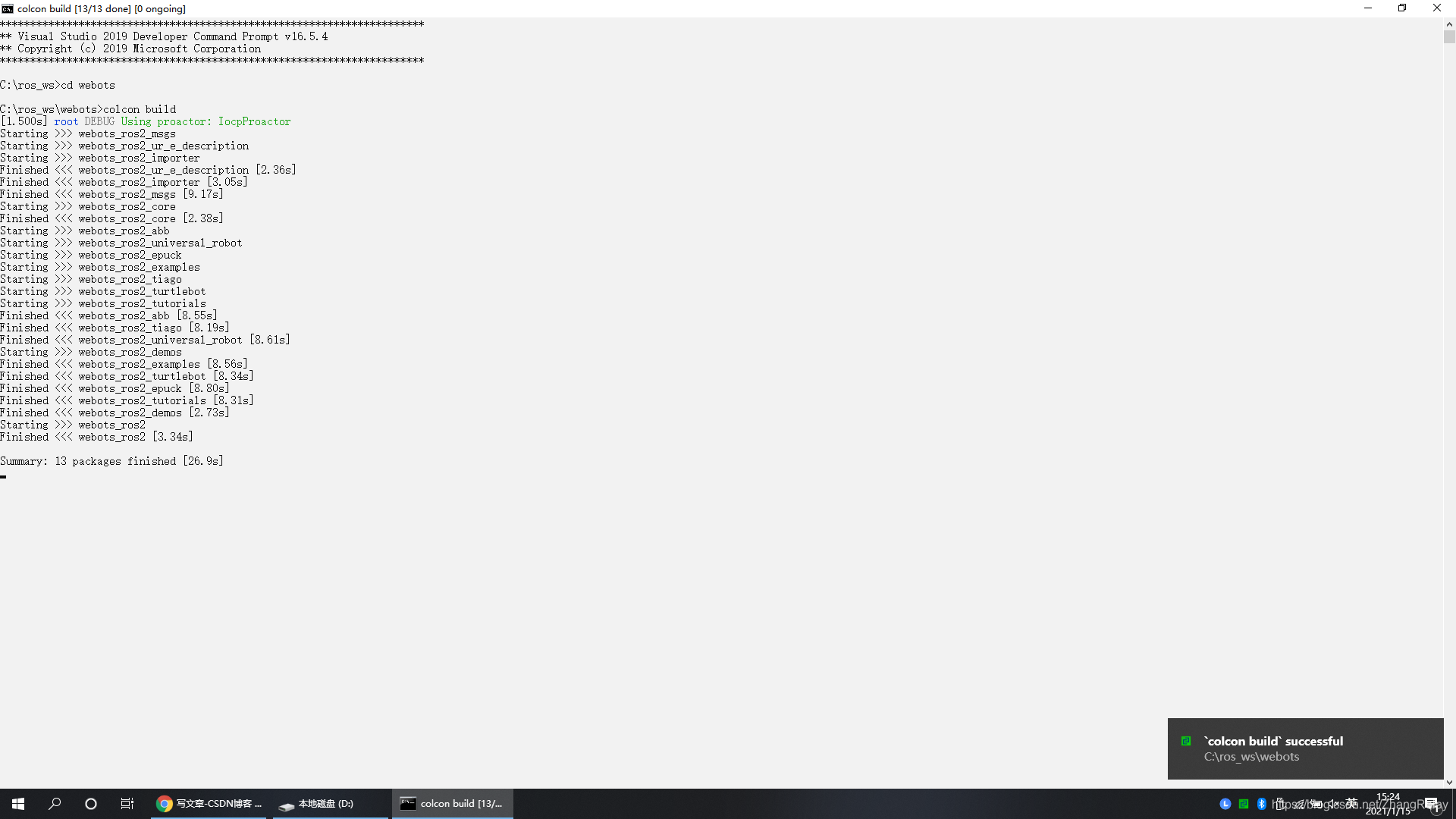
下载源码包,使用colcon build编译后即可使用。
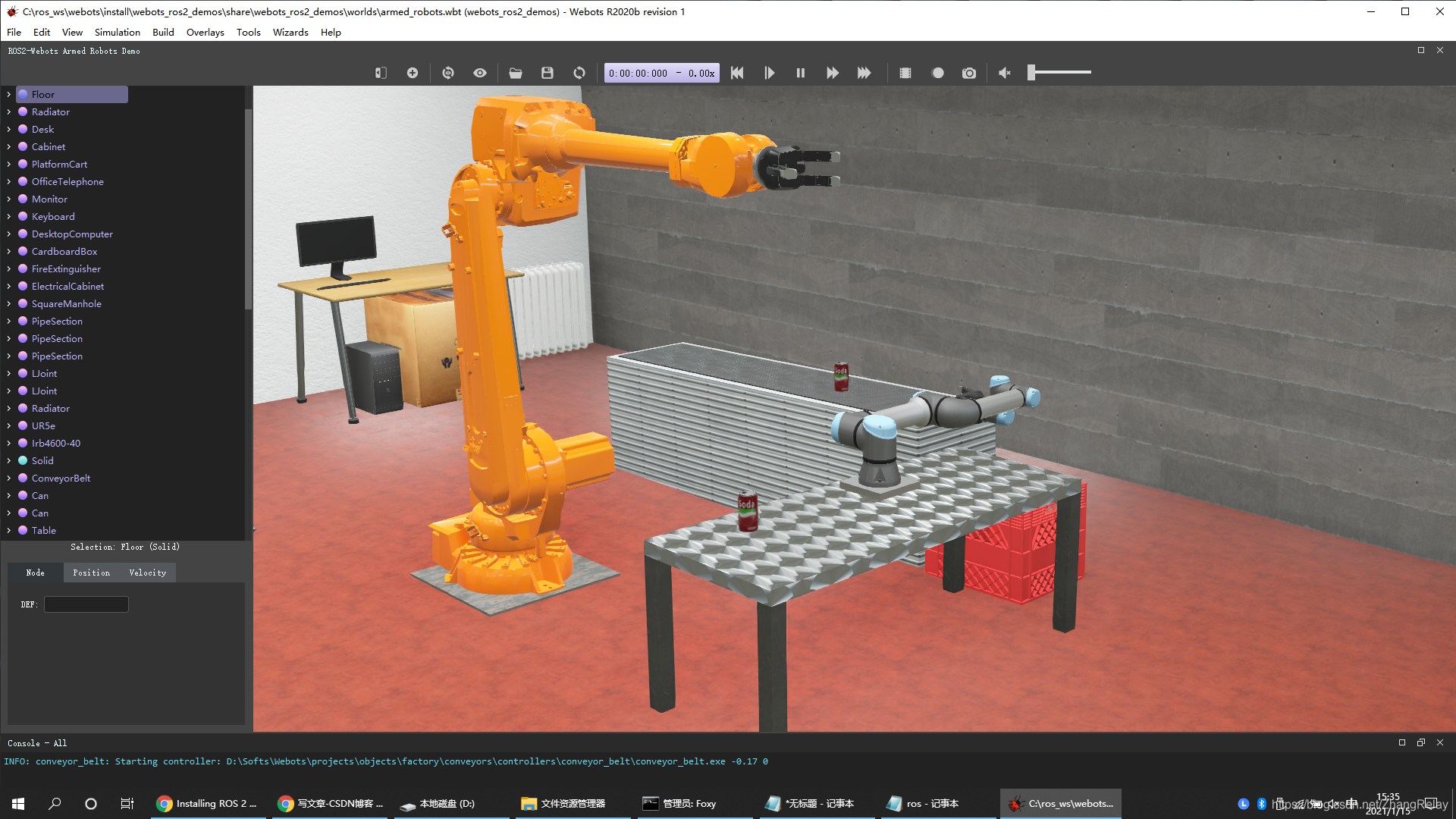
webots_ros2是ROS2软件包,提供了必要的接口以在Webots开源3D机器人模拟器中仿真机器人。它使用ROS2消息,服务和操作与ROS2集成。
Webots的一些关键功能包括:
- 跨平台(Windows,Linux和Mac)。
- 稳定的物理引擎。
- 可重现性。
- 使用基于物理的渲染获得逼真的图像的高效渲染引擎。
- 简单直观的用户界面。
- 模拟各种传感器和执行器可供选择并可以工作。
- 可用的机器人模型范围很广,可以投入使用。
- 范围广泛的文件样本。
文档资源:
- 使用入门-Getting Started
- 编译安装-Build and Install
- 教程讲解-Tutorials
- 项目案例-Examples
- 参考文献-References
————————————————

评论(0)
您还未登录,请登录后发表或查看评论