
看完01-资料篇:webots和ros2笔记01-资料 - 古月居 (guyuehome.com)
是不是有点冲动,想跑一个案例看看效果如何呢?
开始吧。
成功
失败
安装包
安装有两种方式,如果是linux就非常方便,使用如下命令就可以了。
sudo apt-get install ros-$ROS_DISTRO-webots-ros2
其中,$ROS_DISTRO为ROS2版本号,如foxy,命令如下:
sudo apt-get install ros-foxy-webots-ros2
但如果是其他操作系统,那么只能编译源码了哦。
编译源码
Windows
call C:\dev\ros2\local_setup.bat
# Retrieve the sources
cd /path/to/ros2_ws
git clone --recurse-submodules -b $ROS_DISTRO https://github.com/cyberbotics/webots_ros2.git src/webots_ros2
# Building packages
colcon build
# Source this workspace (careful when also sourcing others)
call install\local_setup.bat
Linux
source /opt/ros/$ROS_DISTRO/local_setup.bash
# Retrieve the sources
cd /path/to/ros2_ws
git clone --recurse-submodules -b $ROS_DISTRO https://github.com/cyberbotics/webots_ros2.git src/webots_ros2
# Check dependencies
rosdep update
rosdep install --from-paths src --ignore-src --rosdistro $ROS_DISTRO
# Building packages
colcon build
# Source this workspace (careful when also sourcing others)
source install/local_setup.bash
macOS
source ~/ros2/local_setup.zsh
# Retrieve the sources
cd /path/to/ros2_ws
git clone --recurse-submodules -b $ROS_DISTRO https://github.com/cyberbotics/webots_ros2.git src/webots_ros2
# Building packages
colcon build
# Source this workspace (careful when also sourcing others)
source install/local_setup.zsh
完成之后就像正常的功能包一样使用就行啦!
注意事项
1,webots以及ros2安装版本要和源码指定的版本匹配!
2,当安装多个版本的webots和ros2时需要配置环境说明!
3,如果ROS2_WEBOTS_HOME设置了环境变量,ROS2将使用该文件夹中的Webots。
4,如果WEBOTS_HOME设置了环境变量,ROS2将使用该文件夹中的Webots。
5,如果没有设置/安装上一步,ROS2将在默认安装路径(例如/usr/local/webots)中查找Webots 。(ubuntu)
6,如果找不到Webots,webots_ros2将显示一个窗口并提供自动的Webots安装。(ubuntu)
测试
使用如下命令:
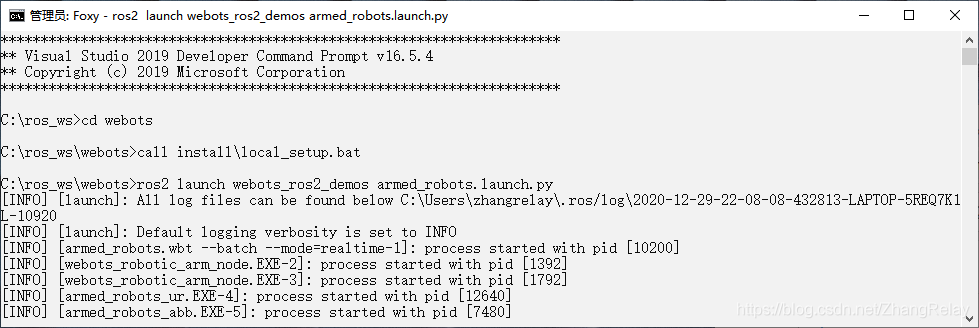
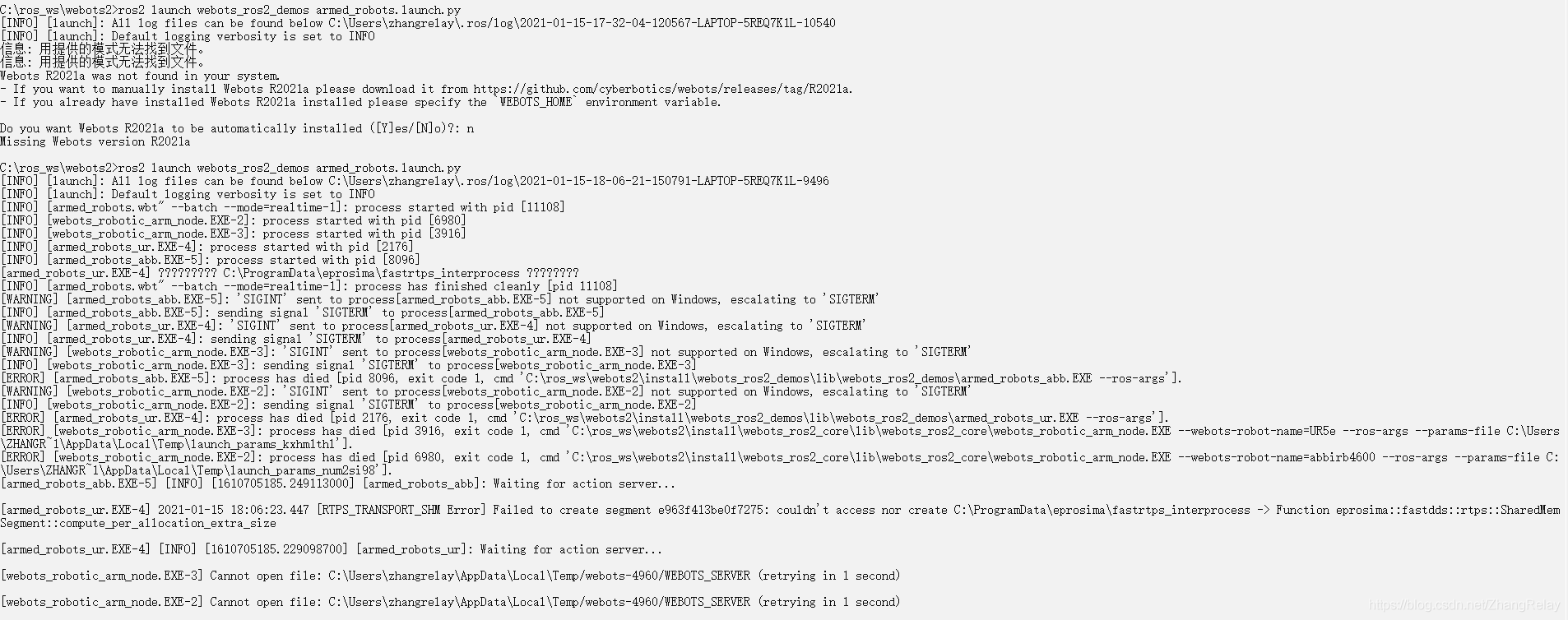
ros2 launch webots_ros2_demos armed_robots.launch.py
报错如下,说明没有call(windows):

正确配置后:
更新,ROS2foxy+Webots2021a。
使用最新版本webots_ros2包,2021年1月10日左右官方最新更新。配置为webots2021a。官网下载龟速,使用如下链接下载速度快:

有新报错信息:
然后colcon build,就一切ok:
使用时出现如下错误,请安装webots2021a。

Windows效果与Ubuntu一致。
Ubuntu下效果:
————————————————

评论(2)
您还未登录,请登录后发表或查看评论