

Robotics工具包是由Peter Croke团队开发的一款基于Matlab平台的机器人运算、仿真的强大工具。2017年6月工具包的v10发布,新版的工具包功能更为强大,且支持更为简便的.mltbx格式安装。工具包更为详细的介绍以及下载、安装可以查看Peter Croke个人网站。本节的内容主要介绍利用工具包求解机器人的正、逆运动学。
- 工具包快速入门
双击robot-10.1.mltbx后工具包会自动安装并配置相关路径,进入Matlab界面后输入:
rtbdemo出现demo菜单
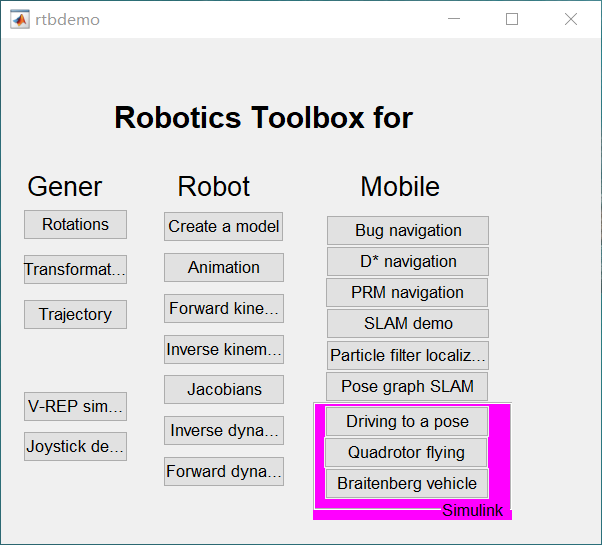
点击demo菜单的具体内容,工具包会在线按步演示实现过程,非常利于快速入门,同时通过菜单可以看出工具包的主要功能。
- 机器人描述
工具包里内建了一些经典的机械臂,如Puma560、斯坦福机械臂等。研究该类机器人可以直接调用实现仿真、运动学、动力学等内容。如下所示:
mdl_stanford %创建斯坦福机械臂,对象名称为stanf
stanf %查看机械臂的相关信息,包括构型、DH参数表等内容
T=stanf.fkine(qz) %求解运动学正解,qz为创建对象时自动生成的关节坐标向量,对应于零角度状态
stanf.maniplty(qz) %判断六轴机器人的可操作性
stanf.ikine6s(T) %求解逆运动学封闭解(仅限有球腕机构的六轴串联机械臂)
stanf.ikine(T) %求解逆运动学数值解对于大多数工具包没有内建的机械臂模型需要自己建立机器人模型,以SCARA型机械臂为例。
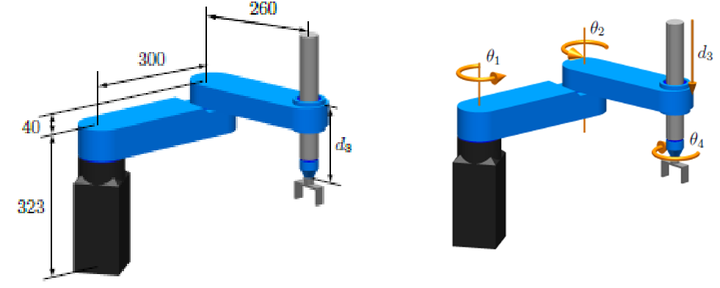
建立机器人运动学模型需要已知DH参数表。DH参数法是由Denavit和Hartenberg于1955年提出的一种描述串联式链路上连杆和关节的系统方法。1986年John J.Craig提出了一种改进的DH参数,在建立关节坐标系时将坐标系固结于该连杆的近端,而非远端,更符合直观理解。为了便于区分,这种方法成为改进DH(Modified DH),而将之前的方法称为标准DH(Standard DH)。这两种方法都被广泛接受,不同教材、论文会使用不同的方法且很多时候不会明确说明,而通过DH参数表很容易区分两种方法:如果四个参数有相同的下标那么就是标准DH,反之则为改正DH。
此处采用标准DH,首先建立坐标系如下所示:

确定DH参数
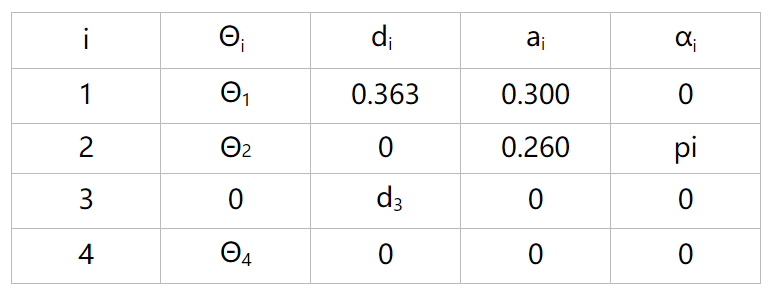
建立连杆
L(1) = Link([0,0.363,0.300,0,0],'standard');
%向量中最后一个参数指定关节为转动关节(0)或移动关节(1)
%第二个参数默认即为'standard',若采用改进DH第二个参数应为'modified'
L(2) = Link([0,0,0.260,pi,0],'standard'); %角度采用弧度
L(3) = Link([0,0,0,0,1],'standard');
L(3).qlim = [0,0.3] %限定移动关节的移动
L(4) = Link([0,0,0,0,0],'standard');
RobotArm = SerialLink(L,'name','SCARA') %建立机器人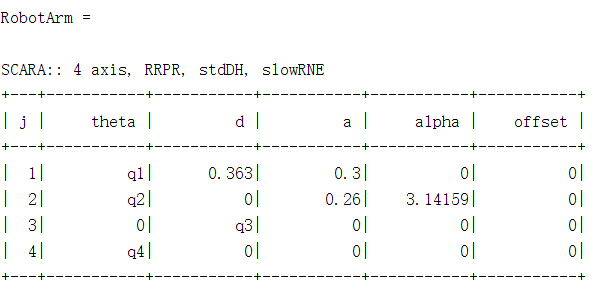
- 求解正运动学与绘图
正运动学用fkine方法,绘图命令调用plot方法,如下
L(1).A(pi/2) %求解关节转角为pi/2时连杆坐标系1到基础坐标系(连杆坐标系0)的齐次变换矩阵
T = RobotArm.fkine([0 0 0 0]) %根据各关节变量求解末端坐标系到基础坐标系的齐次变换矩阵
%等价为 T = L(1).A(0)*L(2).A(0)*L(3).A(0)*L(4).A(0)
RobotArm.plot([0 0 0 0],'workspace',[-1 1 -1 1 -1 1])
%绘图,对于有移动关节的机械臂必须添加worksapce参数如图所示
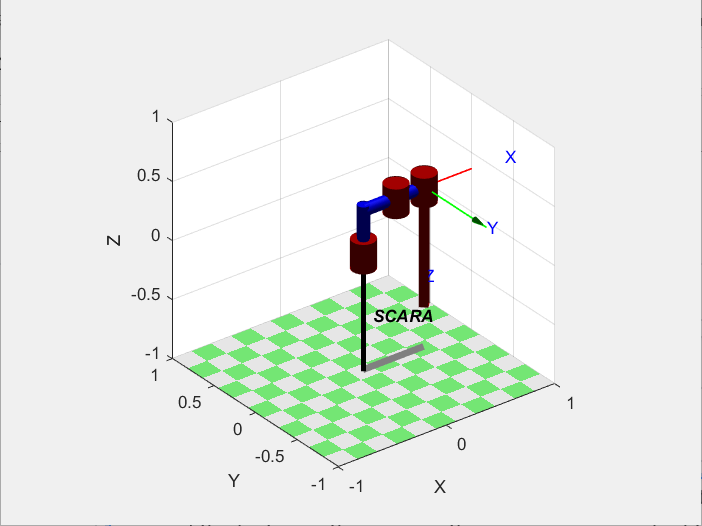
(执行plot命令仍会提示没有添加workspace选项,此处应该是新版本的一个bug,可查看我的issue)
- 逆运动学
六轴串联型机械臂一定是可解的,对于有球腕机构六轴机械臂都可以求得其封闭解,而对于其它结构的机器人可以求解数值解。机械臂逆解可能并不唯一,即存在有限组关节值可以到达同样的目标姿态,在使用ikine6s求解含球腕机构的六轴机械臂封闭解时可以添加位形字符限制。对于小于六轴的机械臂其末端可以达到的姿态是受限的,如SCARA型机械臂末端只能竖直向下,利用ikine求解数值解时需要添加遮盖向量表示忽略的自由度。
T = transl(0.3,0.26,0.2) %定义末端期望位姿
q = RobotArm.ikine(T,[0 0 0 0],[1,1,1,0,0,1])
%第二个参数为给定的初值,第三个参数为遮盖向量,遮盖绕基础坐标系的x,y旋转自由度
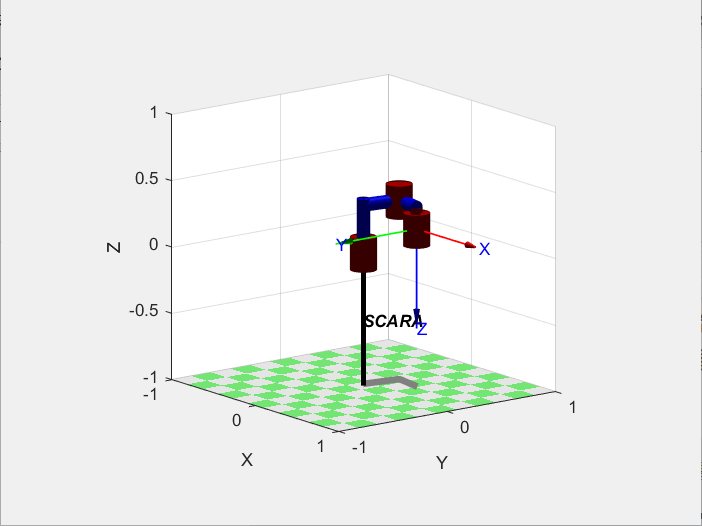
RobotArm.plot(q,'workspace',[-1 1 -1 1 -1 1]) 可以看到目标姿态直观上符合期望姿态,即求解正确。
- 结束语
对于机械臂,工具包的功能远不止如此,如还可以通过Robotics分析轨迹、速度、动力学等内容。此外工具包对于移动机器人的运动仿真、路径规划、SLAM等内容也有较深的涉猎,推荐Peter Corke的Robotics, Vision and Control: Fundamental Algorithms In MATLAB Second, Completely Revised 一书。
参考书籍
Robotics, Vision and Control: Fundamental Algorithms In MATLAB
Introduction to Robotics: Mechanical and control




评论(0)
您还未登录,请登录后发表或查看评论