

该系列主要为对前期工作进行梳理,以后所进行的工作也会部分在此记录。点云地图后处理和地图动态加载
部分代码已开源至Github, 后续将继续补充,仅供参考.
本文包含以下内容:
- 对NDT_Mapping建立的点云地图进行后处理,包括降采样和网格划分;
- 通过points_map_loader,根据当前位置实时加载可视区域内的匹配地图;
点云地图后处理
1. 降采样
目的
建立好的点云文件中,有很多点是重合的,需要通过采用合适的voxel_leaf_size以减小点云文件体积,便于传输和加载,通常降采样后体积可以降到原来的一半以下。同时由于NDT的特性,降采样后并不会影响最终的匹配定位效果;
实现
实现部分比较简单,即不断的读入点云文件,然后进行voxel_filter,然后保存到新文件中。
由于我们的目的是为了滤除重合点,因此leaf_size不宜过大,通常为0.1~0.2即可。
// voxel_filter过滤
pcl::VoxelGrid<pcl::PointXYZ> voxel_grid_filter;
voxel_grid_filter.setLeafSize(leaf_size, leaf_size, leaf_size);
voxel_grid_filter.setInputCloud(base_map);
voxel_grid_filter.filter(*map_filtered);
voxel_filter可以作为单独的模块进行调用,但一般都将其作为某个package中的一部分(函数),进行降采样操作。
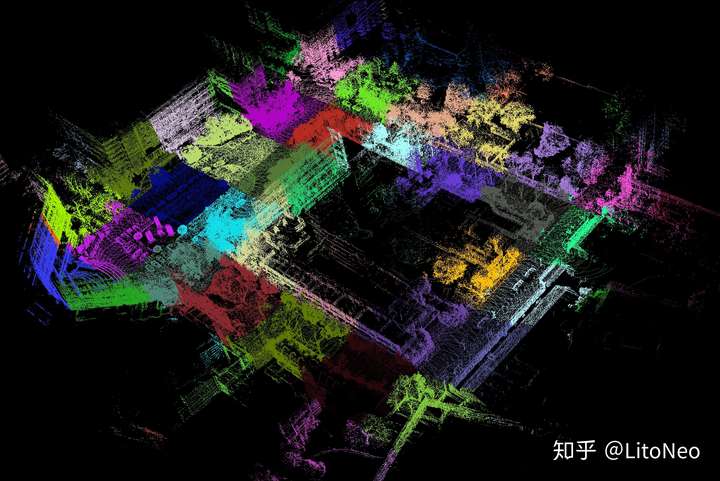
2. 点云地图网格划分
目的
1. 通过按照一定的网格大小对点云地图进行区域划分,可以实现动态加载target_map,理论上可以支持区域无限大的场景;
2. 实验测得,对地图进行区域划分有序化后,加载速度比原来快很多;
实现
一般来讲网格化通常是按照方形区域进行划分,因此需要指定划分区域的边长。
点云文件命名:{grid_size}_{min_x}_{min_y}.pcd 例如30_-60_90.pcd表示该点云区域范围为[-60:-30, 90:120] 具体的实现也比较简单,可以直接参考我的源代码。 最终效果:
加载速度对比:
在我的渣机上,加载未进行网格化处理的点云需要大约5s,而经过了网格化处理后,其加载时间可以小于1s 以下是视频对比:
或移步YouTube
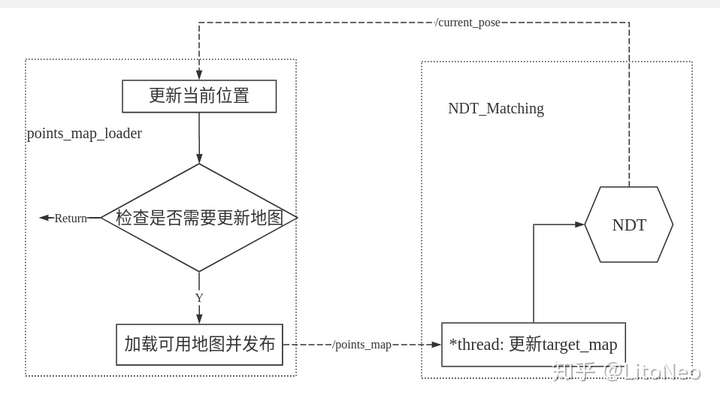
3. 点云地图动态加载points_map_loader
目的
根据车辆当前位置,实时加载当前区域地图,供NDT_Matching更新target_map。
实现
定义用于存储点云点及其信息的结构体
struct Area
{
std::string filename;
double x_min;
double y_min;
double z_min;
double x_max;
double y_max;
double z_max;
sensor_msgs::PointCloud2 points;
};
初始化节点和各参数
pnh_.param<double>("margin", MARGIN, 100.0); // 需要加载的区域的范围,比如velodyne16的有效距离是100m,则加载范围最好应>120m
pnh_.param<double>("update_interval", UPDATE_INTERVAL, 1000.0); // ms,更新频率
pnh_.param<std::string>("map_dir", MAP_DIR, "/map/"); // 存储点云文件的目录
定义接收的topic
ros::Subscriber current_sub = nh_.subscribe("/ndt/current_pose", 10, publish_current_pcd);
ros::Subscriber initial_sub = nh_.subscribe("initialpose", 1, publish_dragged_pcd);
主要函数:
sensor_msgs::PointCloud2 create_pcd(const geometry_msgs::Point &p) // 载入p±MARGIN区域内的点云
{
AreaList wanted_AreaList = create_wantedAreaList(p); // std::vector<Area>, 存储目标点云文件信息,此时并没有进行点云的io加载
AreaList tmp_AreaList;
bool cache_update = false;
for (Area &area : wanted_AreaList) // cached_AreaList记录缓存的点云及其信息:由于两次发布之间大多数点云是重复的,因此使用cached_AreaList进行缓存,以减少IO次数
{
int index = is_in_cachedAreaList(area);
if (index == -1)
{ // io
Area in_area(area);
pcl::io::loadPCDFile(MAP_DIR + area.filename, in_area.points);
tmp_AreaList.push_back(in_area);
cache_update = true;
}
else
{
Area in_area(cached_AreaList[index]);
tmp_AreaList.push_back(in_area);
}
}
if (cache_update)
{
cached_AreaList.clear();
cached_AreaList = tmp_AreaList; // 更新cached_AreaList
}
else
{
sensor_msgs::PointCloud2 msg_pcd;
msg_pcd.width = 0; // 若该次应发布的点云和上次的相同,则不发布
return msg_pcd;
}
sensor_msgs::PointCloud2 msg_pcd;
for (const Area &area : cached_AreaList) // 构建需要更新发布的点云消息
{
if (msg_pcd.width == 0)
msg_pcd = area.points;
else
{
msg_pcd.width += area.points.width;
msg_pcd.row_step += area.points.row_step;
msg_pcd.data.insert(msg_pcd.data.end(), area.points.data.begin(), area.points.data.end());
}
}
return msg_pcd;
}
NDT_Matching中的实现:
由于ndt加载target_map需要进行包括voxel等一系列操作,相当费时间,因此NDT_Matching中使用单独的线程进行ndt target_map的更新,新建ndt实例并进行初始化,然后进行ndt实例的替换,以避免占用过多主线程的时间。
更新ndt的线程
void *thread_func(void *args)
{
ros::NodeHandle nh_map;
ros::CallbackQueue map_callback_queue;
nh_map.setCallbackQueue(&map_callback_queue);
sub_map_ = nh_map.subscribe<sensor_msgs::PointCloud2>("/points_map", 10, mapCB);
ros::Rate ros_rate(10);
while (nh_map.ok())
{
map_callback_queue.callAvailable(ros::WallDuration());
ros_rate.sleep();
}
return nullptr;
}
void mapCB(const sensor_msgs::PointCloud2::ConstPtr &msg)
{
if (model_pc_num_ == msg->width)
{
// suppose it is same map.
return;
}
if (!pose_init_)
{
ROS_WARN("initial pose not set, cannot update target_map");
return;
}
model_pc_num_ = msg->width;
pcl::fromROSMsg(*msg, model_pc_);
PointCloudT::Ptr target_map_ptr(new PointCloudT(model_pc_)); // 存储用于更新ndt的target_map
// set NDT target
if (param_method_type_ == METHOD_CUDA)
{
#ifdef CUDA_FOUND
std::shared_ptr<gpu::GNormalDistributionsTransform> new_anh_gpu_ndt_ptr = std::make_shared<gpu::GNormalDistributionsTransform>();
new_anh_gpu_ndt_ptr->setResolution(param_ndt_resolution_);
new_anh_gpu_ndt_ptr->setInputTarget(target_map_ptr);
new_anh_gpu_ndt_ptr->setMaximumIterations(param_ndt_max_iterations_);
new_anh_gpu_ndt_ptr->setStepSize(param_ndt_step_size_);
new_anh_gpu_ndt_ptr->setTransformationEpsilon(param_ndt_epsilon_);
PointCloudT::Ptr dummy_scan_ptr(new PointCloudT());
PointT dummy_point;
dummy_scan_ptr->push_back(dummy_point);
new_anh_gpu_ndt_ptr->setInputSource(dummy_scan_ptr);
new_anh_gpu_ndt_ptr->align(Eigen::Matrix4f::Identity());
pthread_mutex_lock(&mutex);
anh_gpu_ndt_ptr = new_anh_gpu_ndt_ptr; // 此步将更新主线程中的ndt实例
pthread_mutex_unlock(&mutex);
#else
ROS_ERROR("param method_type set to cuda, but cuda_found not defined!");
#endif
}
map_init_ = true;
}
(由于所做项目是在特定园区中进行,因此没有对向网络请求地图的部分做实现。)
最终效果(为了展示,MARGIN=120.0):
移步自动驾驶系列:激光雷达建图和定位(NDT) 最下面的NDT_Matching部分视频
或移步YouTube



评论(1)
您还未登录,请登录后发表或查看评论