

写在前面
A*算法之所以有可变性与其启发函数有密不可分的关系,启发函数可以决定算法在搜索的时候的搜索方式,那么今天就来比较一下不同启发函数(搜索方式)对于算法表现的影响。
绿色:待搜索节点;
浅灰色:搜索过程中的最小Fn数值点;
红色:起点;
绿色:终点;
黄色:最终的生成路径;
黑色:障碍物(不可走坐标);
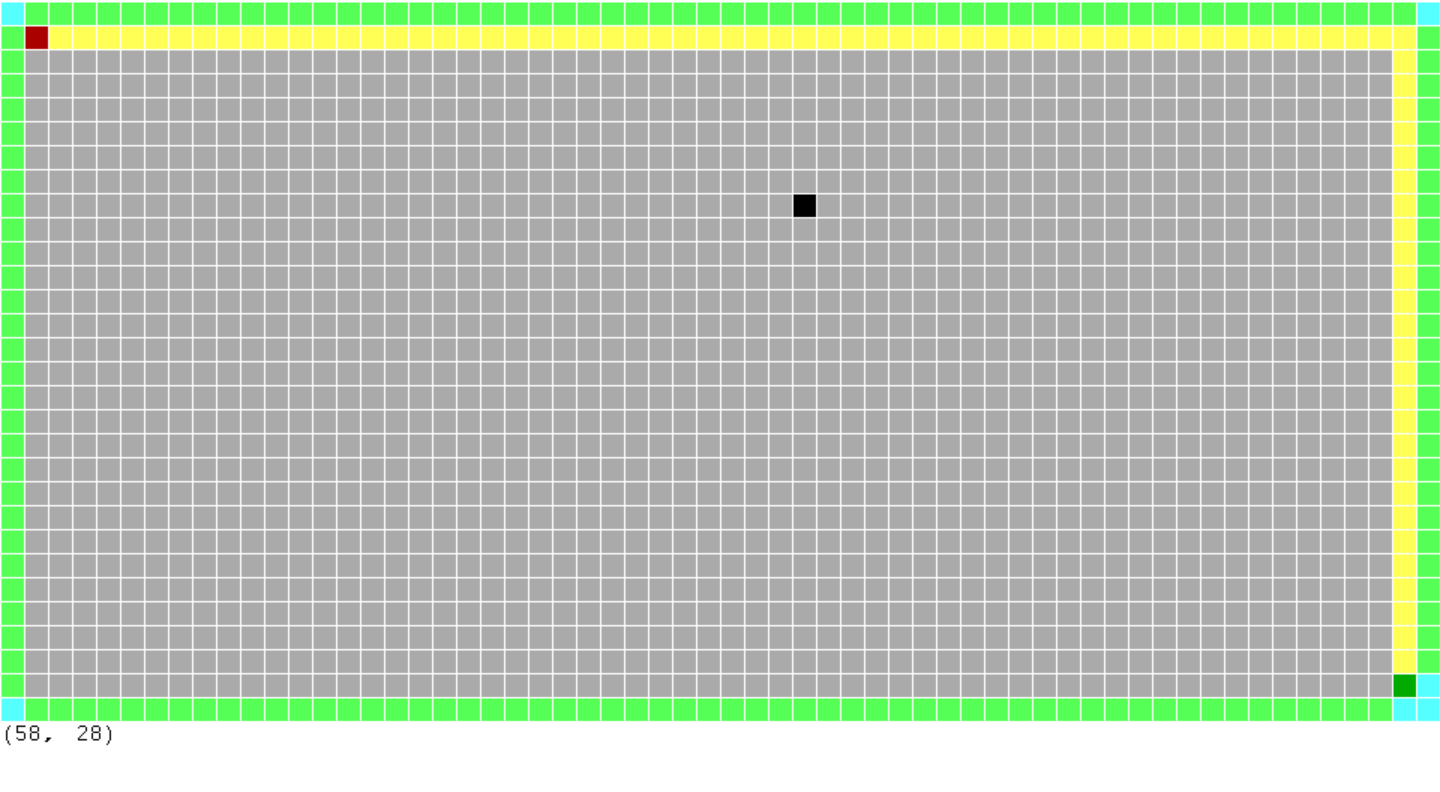
下面在做算法演示的时候我还是保留了一个障碍物,也是为了保证算法运行的完整性。
对比
首先以曼哈顿距离(Manhattan_Distance)为例,搜索方式如下所示:
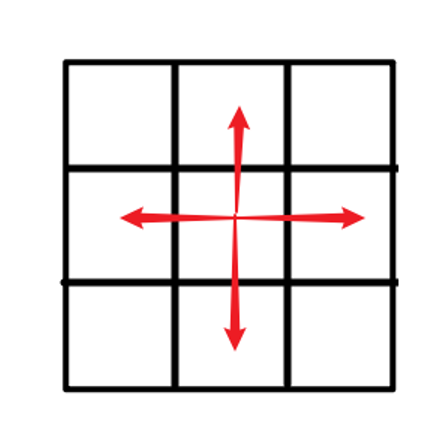
从图示中可以看出,这种方法在搜索的时候只能往上下左右进行,那么用了这种方法的时候算法表现如何呢?一起来看看。
算法测试方式:
#define Manhattan_Distance 0
//#define Euclidean_Distance 1
const int env_nums = 4;
int offset_x[4] = {0, 1, 0, -1};
int offset_y[4] = {-1, 0, 1, 0};
for (int i = 0; i < env_nums; i++) {
Point* search_p = new Point((*p).x + offset_x[i], (*p).y + offset_y[i]);
}
int A_star::calcu_cost(const Point& p1, const Point& p2)
{
int dx = abs(p1.x - p2.x);
int dy = abs(p1.y - p2.y);
int cost = 0;
calcu_type_selection(cost, dx, dy);
return cost;
}
int A_star::calcu_Hn(const Point& p1)
{
int dx = abs(p1.x - end.x);
int dy = abs(p1.y - end.y);
int Hn = 0;
calcu_type_selection(Hn, dx, dy);
return Hn;
}
void A_star::calcu_type_selection(int& data, const int& dx1, const int& dy1) {
#ifdef Manhattan_Distance
data = plane_cost * (dx1 + dy1);
#elif Euclidean_Distance
data = plane_cost * sqrt(dx1 * dx1 + dy1 * dy1);
#endif
}
可以看到在这种启发函数的条件下,搜索效率(灰色+绿色方块都是搜索过的路径)特别低,几乎把整张地图都搜索了一遍才找到路径,而且找到的路径也不是最优路径。
接下来我们来看看欧几里得距离(Euclidean_Distance),这种启发函数的行走方式如图所示:
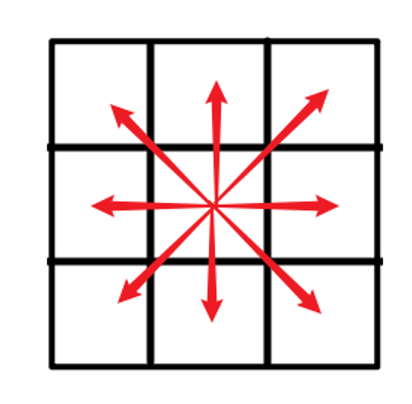
如图所示,这种启发函数的前进方向是上下左右,左上,左下,右上,右下这8个方向,那么这种启发函数最终会如何影响算法呢?如下图所示:
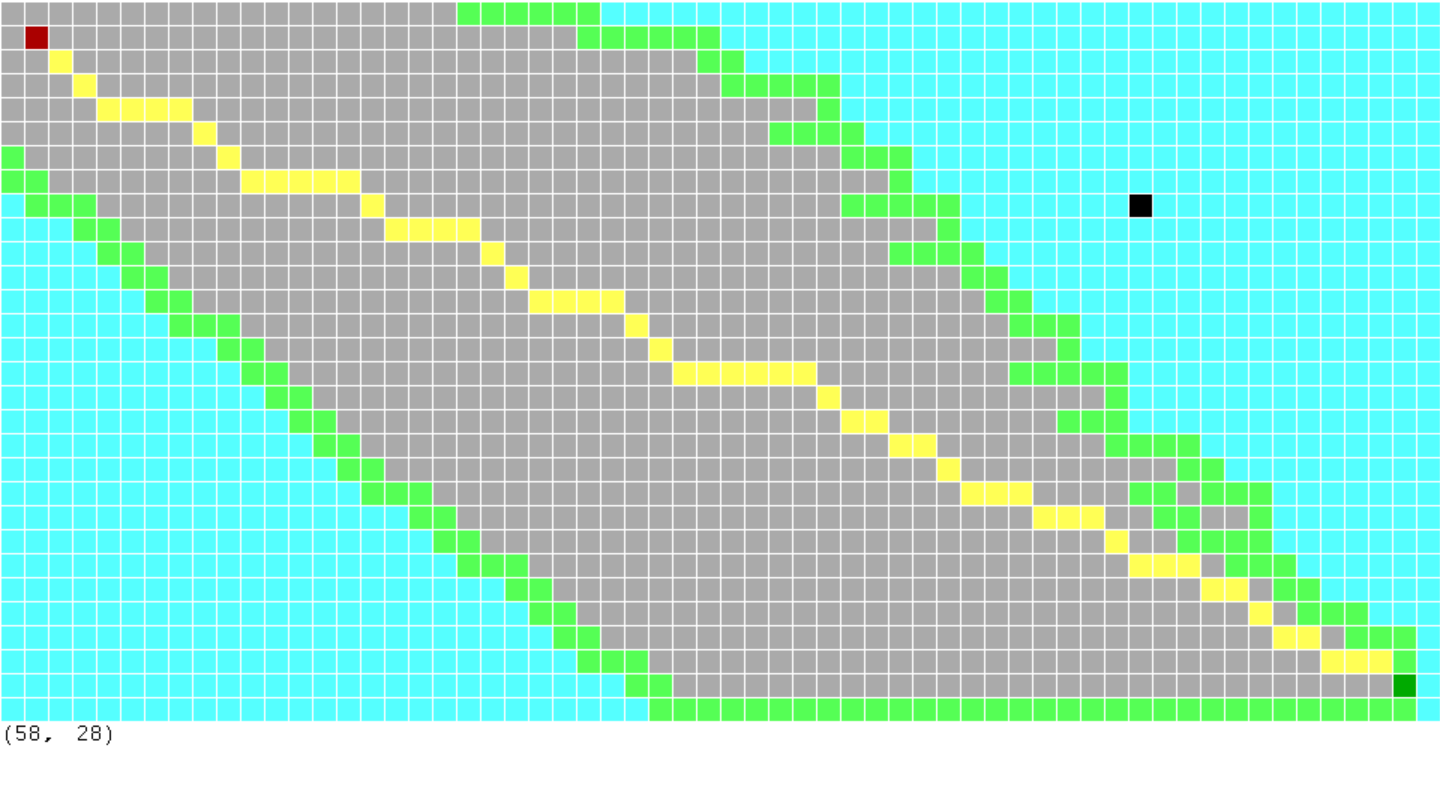
可以看到欧几里的启发函数作用下,算法的表现发生了极大的改善,不但搜索路径(灰色+绿色方块)变少了,而且得到的最终路径也比之前那个更好了。
算法测试方式:
//#define Manhattan_Distance 0
#define Euclidean_Distance 1
const int env_nums = 8;
int offset_x[8] = {-1, 0, 1, 1, 1, 0, -1, -1};
int offset_y[8] = { -1, -1, -1, 0, 1, 1, 1, 0};
for (int i = 0; i < env_nums; i++) {
Point* search_p = new Point((*p).x + offset_x[i], (*p).y + offset_y[i]);
}
int A_star::calcu_cost(const Point& p1, const Point& p2)
{
int dx = abs(p1.x - p2.x);
int dy = abs(p1.y - p2.y);
int cost = 0;
calcu_type_selection(cost, dx, dy);
return cost;
}
int A_star::calcu_Hn(const Point& p1)
{
int dx = abs(p1.x - end.x);
int dy = abs(p1.y - end.y);
int Hn = 0;
calcu_type_selection(Hn, dx, dy);
return Hn;
}
void A_star::calcu_type_selection(int& data, const int& dx1, const int& dy1) {
#ifdef Manhattan_Distance
data = plane_cost * (dx1 + dy1);
#elif Euclidean_Distance
data = plane_cost * sqrt(dx1 * dx1 + dy1 * dy1);
#endif
}
总结
可以看到优秀的启发算法能够很好的优化算法的表现。



评论(0)
您还未登录,请登录后发表或查看评论