

乌龟例程中的Publisher与Subscriber
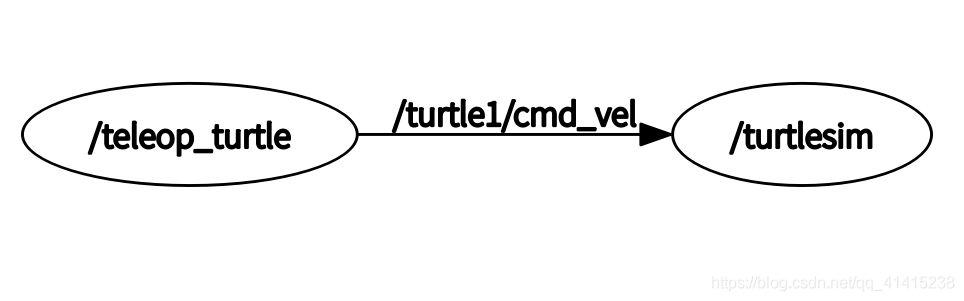
查看乌龟的节点关系
运行乌龟程序
$ roscore
$ rosrun turtlesim turtlesim_node
$ rosrun turtlesim turtle_teleop_key查看乌龟例程中的节点关系
$ rqt_graph- 1
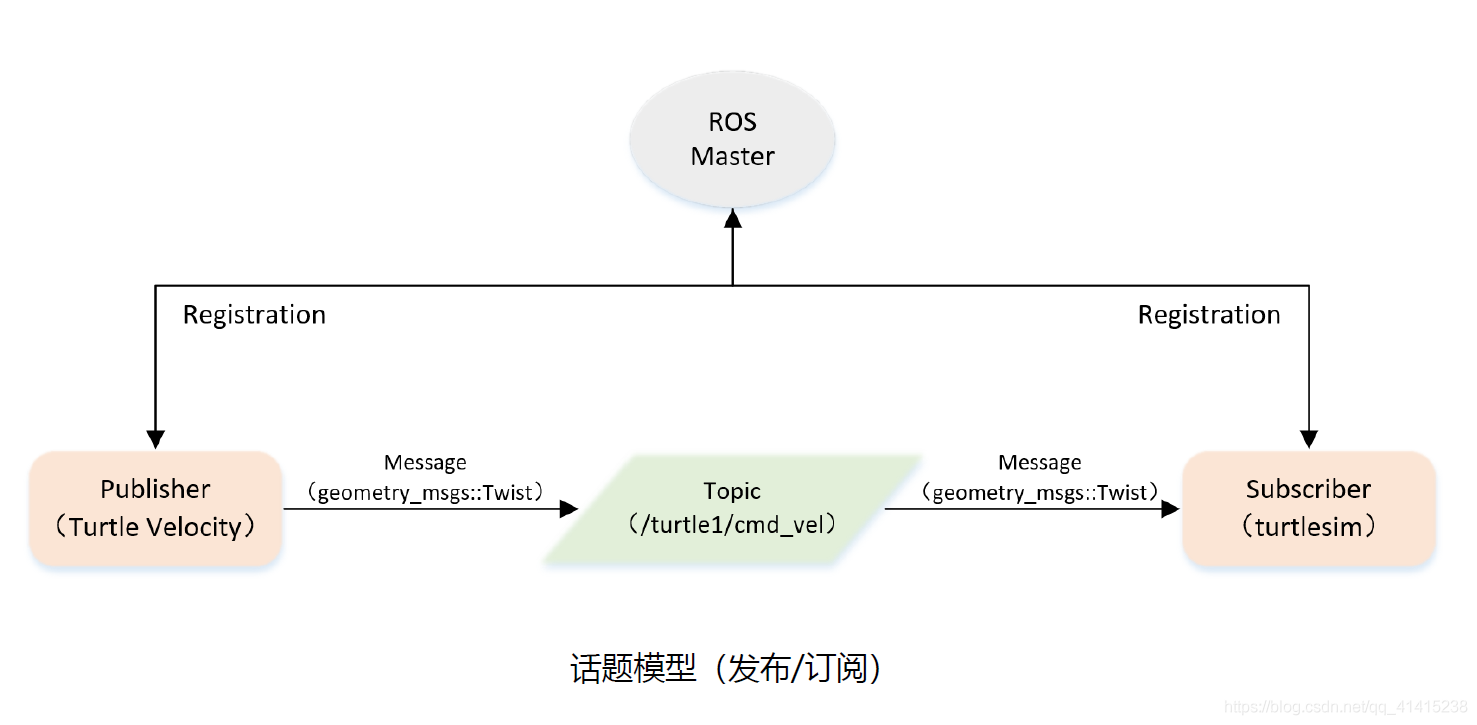
乌龟发布者Publisher
发布者模型图
实现
创建工作空间及初始化
$ mkdir -p ~/catkin_ws/src
$ cd ~/catkin_ws/src
$ catkin_init_worksp ace编译工作空间
$ cd ~/catkin_ws/
$ catkin_make配置环境变量并检查
$ source devel/setup.bash
$ echo $ROS_PACKAGE_PATH在工作空间下创建名为learning_topic的功能包
$ cd ~/catkin_ws/src
$ catkin_create_pkg learning_topic roscpp rospy std_msgs geometry_msgs turtlesim在功能包src下创建一个名为velocity_publisher.cpp的文件
/**
* 该例程将发布turtle1/cmd_vel话题,消息类型geometry_msgs::Twist
*/
#include <ros/ros.h>
#include <geometry_msgs/Twist.h>
int main(int argc, char **argv)
{
// ROS节点初始化
ros::init(argc, argv, "velocity_publisher");
// 创建节点句柄
ros::NodeHandle n;
// 创建一个Publisher,发布名为/turtle1/cmd_vel的topic,消息类型为geometry_msgs::Twist,队列长度10
ros::Publisher turtle_vel_pub = n.advertise<geometry_msgs::Twist>("/turtle1/cmd_vel", 10);
// 设置循环的频率
ros::Rate loop_rate(10);
int count = 0;
while (ros::ok())
{
// 初始化geometry_msgs::Twist类型的消息
geometry_msgs::Twist vel_msg;
vel_msg.linear.x = 0.5;
vel_msg.angular.z = 0.2;
// 发布消息
turtle_vel_pub.publish(vel_msg);
ROS_INFO("Publsh turtle velocity command[%0.2f m/s, %0.2f rad/s]",
vel_msg.linear.x, vel_msg.angular.z);
// 按照循环频率延时
loop_rate.sleep();
}
return 0;
}配置功能包下CMakeLists.txt中的编译规则(设置需要编译的代码和生成的可执行文件及设置链接库)
add_executable(velocity_publisher src/velocity_publisher.cpp)
target_link_libraries(velocity_publisher ${catkin_LIBRARIES})编译并运行发布者
$ cd ~/catkin_ws
$ catkin_make
$ source devel/setup.bash
$ roscore
$ rosrun turtlesim turtlesim_node
$ rosrun learning_topic velocity_publisher
总结流程
- 初始化ROS节点。
- 向ROS Master注册节点信息包括发布的话题名和话题中的消息类型。
- 按照一定频率循环发布消息。
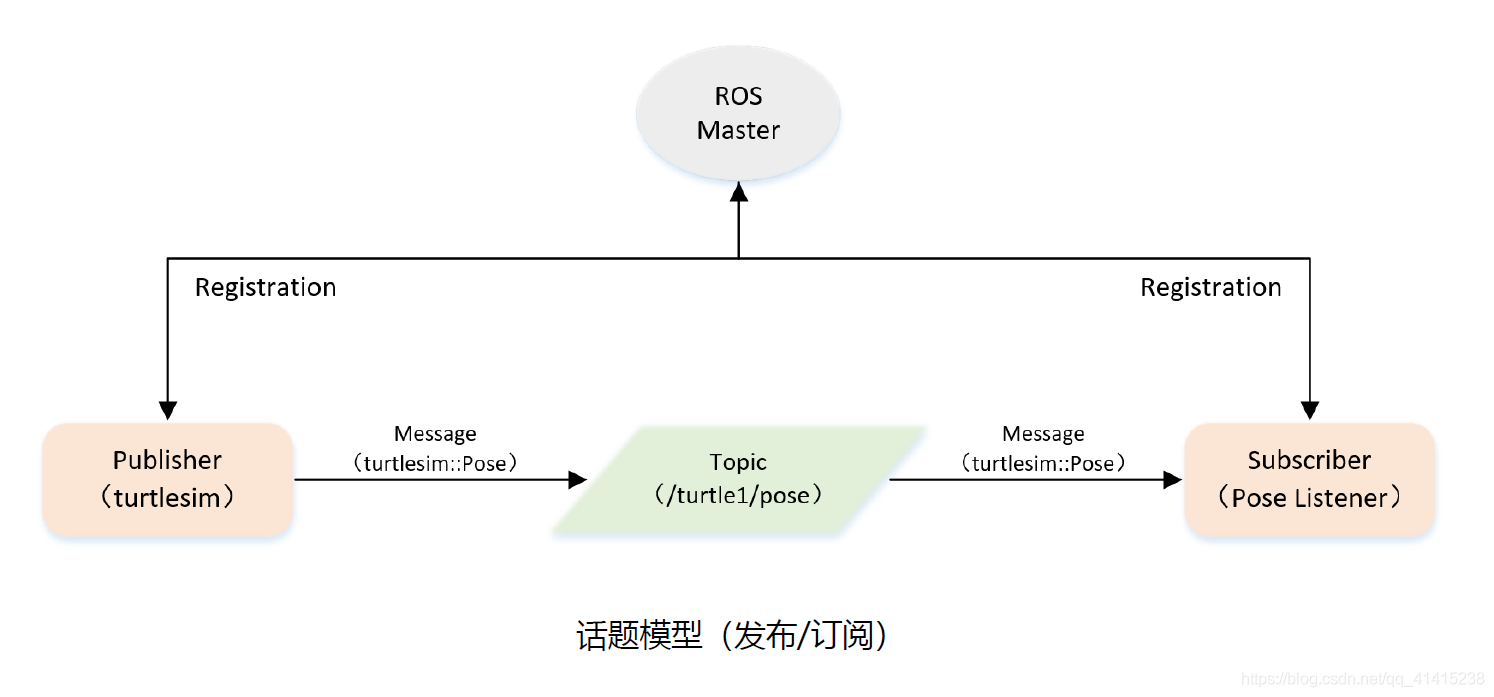
乌龟订阅者Subscriber
发布者模型图
实现
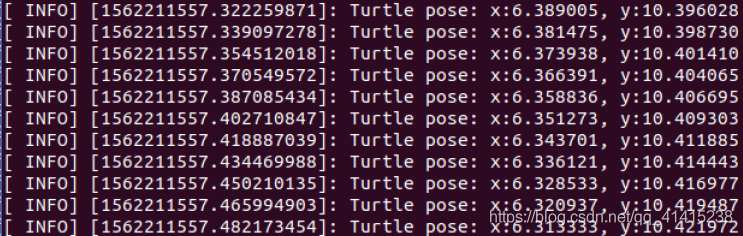
在功能包src下创建一个名为pose_subscriber.cpp的文件
/**
* 该例程将订阅/turtle1/pose话题,消息类型turtlesim::Pose
*/
#include <ros/ros.h>
#include "turtlesim/Pose.h"
// 接收到订阅的消息后,会进入消息回调函数
void poseCallback(const turtlesim::Pose::ConstPtr& msg)
{
// 将接收到的消息打印出来
ROS_INFO("Turtle pose: x:%0.6f, y:%0.6f", msg->x, msg->y);
}
int main(int argc, char **argv)
{
// 初始化ROS节点
ros::init(argc, argv, "pose_subscriber");
// 创建节点句柄
ros::NodeHandle n;
// 创建一个Subscriber,订阅名为/turtle1/pose的topic,注册回调函数poseCallback
ros::Subscriber pose_sub = n.subscribe("/turtle1/pose", 10, poseCallback);
// 循环等待回调函数
ros::spin();
return 0;
}注释:
死循环,等待订阅消息触发回调函数
空间队列
配置功能包下的CMakeLists.txt中的编译规则
add_executable(pose_subscriber src/pose_subscriber.cpp)
target_link_libraries(pose_subscriber ${catkin_LIBRARIES})编译并运行
$ cd ~/catkin_ws
$ catkin_make
$ source devel/setup.bash
$ roscore
$ rosrun turtlesim turtlesim_node
$ rosrun learning_topic velocity_publisher
总结流程
- 初始化ROS节点。
- 订阅需要的话题。
- 循环等待话题消息接收到消息后进入回调函数。
- 在回调函数中完成消息处理。
Publisher之“Hello World”例程
在工作空间src下创建名为learning_communication的功能包
$ catkin_create_pkg learning_communication std_msgs rospy roscpp创建Publisher
在功能包src下创建名为talker.cpp的文件
/**
* 该例程将发布chatter话题,消息类型String
*/
#include <sstream>
#include "ros/ros.h"
#include "std_msgs/String.h"
int main(int argc, char **argv)
{
// ROS节点初始化
ros::init(argc, argv, "talker");
// 创建节点句柄
ros::NodeHandle n;
// 创建一个Publisher,发布名为chatter的topic,消息类型为std_msgs::String
ros::Publisher chatter_pub = n.advertise<std_msgs::String>("chatter", 1000);
// 设置循环的频率
ros::Rate loop_rate(10);
int count = 0;
while (ros::ok())
{
// 初始化std_msgs::String类型的消息
std_msgs::String msg;
std::stringstream ss;
ss << "hello world " << count;
msg.data = ss.str();
// 发布消息
ROS_INFO("%s", msg.data.c_str());
chatter_pub.publish(msg);
// 循环等待回调函数
ros::spinOnce();
// 按照循环频率延时
loop_rate.sleep();
++count;
}
return 0;
}注意:
节点的名称而且该名称在运行的ROS中必须是独一无二的不允许同时存在相同名称的两个节点。
实际速度较慢时Publisher会将消息存储在一定空间的队列中如果消息数量超过队列大小时ROS会自动删除队列中最早入队的消息。
创建Subscriber
在功能包src下创建名为listener.cpp的文件
/**
* 该例程将订阅chatter话题,消息类型String
*/
#include "ros/ros.h"
#include "std_msgs/String.h"
// 接收到订阅的消息后,会进入消息回调函数
void chatterCallback(const std_msgs::String::ConstPtr& msg)
{
// 将接收到的消息打印出来
ROS_INFO("I heard: [%s]", msg->data.c_str());
}
int main(int argc, char **argv)
{
// 初始化ROS节点
ros::init(argc, argv, "listener");
// 创建节点句柄
ros::NodeHandle n;
// 创建一个Subscriber,订阅名为chatter的topic,注册回调函数chatterCallback
ros::Subscriber sub = n.subscribe("chatter", 1000, chatterCallback);
// 循环等待回调函数
ros::spin();
return 0;
}注意:
当有消息到达时会自动以消息指针作为参数再调用回调函数完成对消息内容的处理
配置功能包下的CMakeLists.txt中的编译规则及设置头文件的相对路径
include_directories(include ${catkin_INCLUDE_DIRS})
add_executable(talker src/talker.cpp)
target_link_libraries(talker ${catkin _LIBRARIES})
add_dependencies(talker ${PROJECT_NAME}_generate_ messages_cpp)
add_executable(listener src/listener.cpp)
target_link_libraries(listener ${catkin_L IBRARIES})
add_dependencies(talker ${PROJECT_NAME}_generate_me ssages_cpp)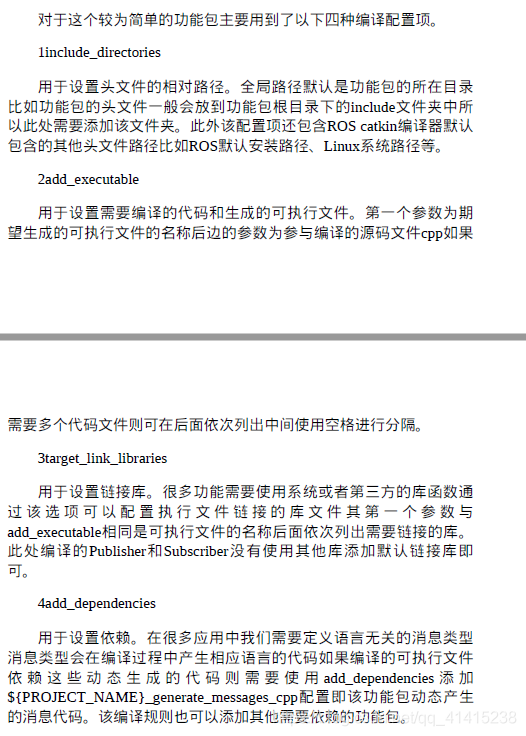
编译运行
编译
$ cd ~/catkin_ws
$ catkin_make
$ source ./devel /setup.bash启动roscore
$ roscore启动talker
$ rosrun learning_communication talker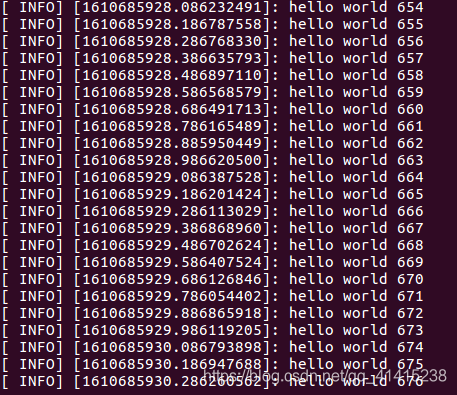
启动listener
$ rosrun learning_communication listener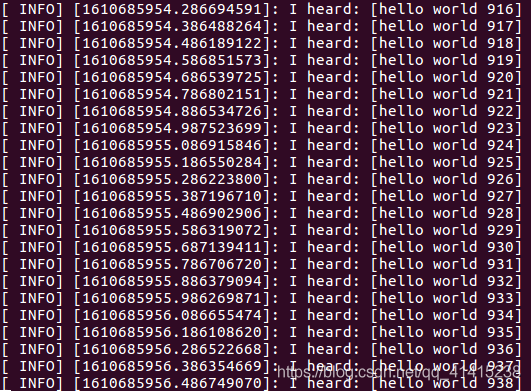
自定义话题消息
在learning_communication功能包下创建一个名为msg的文件夹,在文件夹下创建一个名为Person.msg的描述文件
string name
uint8 sex
uint8 age
uint8 unknown = 0
uint8 male = 1
uint8 female = 2打开功能包的package.xml文件确保该文件中设置了以下编译和运行的相关依赖
<build_depend>message_generation</build_depend>
<run_depend>message_runtime</run_depend>CMakeLists.txt中添加编译选项
find_package(catkin REQUIRED COMPONENTS
geometry_msgs
roscpp
rospy
std_m sgs
message_ generation
)catkin依赖也需要进行以下设置
catkin_package(
……
CA TKIN_DEPENDS geometry_msgs roscpp rospy std_msgs message_runtime
……)最后设置需要编译的msg文件
add_message_files(
FILES
Perso n.msg
)
g enerate_messages(
DEPENDENCIES
std_msgs
)回根目录并编译
catkin_make查看自定义的Person消息类
$ rosmsg show Person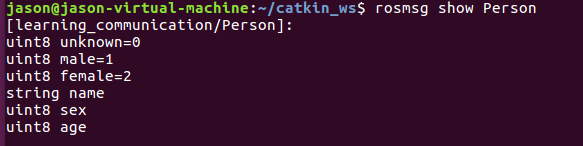
胡春旭《ROS机器人开发实践》

评论(0)
您还未登录,请登录后发表或查看评论