
文章目录
一. 工作空间
1.1 工作空间的概念
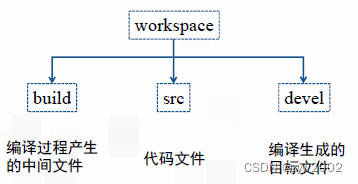
workspace:存放工程文件的文件夹
1.2 创建工作空间
# 创建文件夹
mkdir -p ~/wheeltec/src
# 进入文件夹
cd ~/wheeltec/src
# 初始化工作空间
catkin_init_workspace

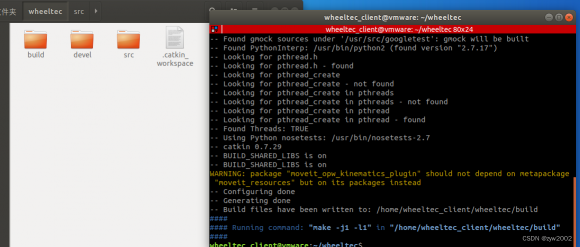
1.3 编译工作空间
# 返回上一级路径
cd ..
# 编译工作空间
catkin_make
# 编译单独功能包
catkin_make -DCATKIN_WHITELIST_PACKAGES="package_name"
# 自定义编译线程
catkin_make -j -1
如果编译单独的功能包之后,再使用catkin_make 的时候,仍默认编辑上一种单独的功能包。当我们想去编译整个功能包时,需要将packge_name 设定为空。
1.4 设置环境变量
- 添加局部的环境变量,如果
roslauch指令在另外一个终端执行会失效。
# 添加环境变量
source devel/setup.bash
# 查看ROS的环境变量
echo $ROS_PACKAGE_PATH
# 然后再运行
roslauch xxx.launch
- 添加全局的环境变量
# 编辑 .bashrc文件
cd ~
nano .bashrc
source ..../devel/setup.bash
source .bashrc
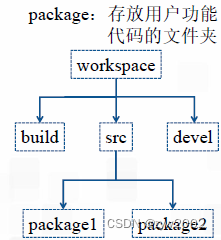
二. 功能包
2.1 功能包的概念
2.2 功能包的内容
include: .h文件src:.cpp文件launch: launch文件,启动urdf:.urdf文件,rviz工具中三维模型的一个描述性文件config: 参数文件,yaml,srv,msg,actionscripts: 可执行脚本文件(Python)CMakeLists.txt:定义编译的规则package.xml: 定义package的属性
2.3 创建功能包
# 创建功能包
catkin_create_pkg <package_name> [depend1] [depend2] [depend3]
# 实例
catkin_create_pkg new_package std_msgs rospy roscpp
三. CMakeLists.txt
3.1 CMakeLists.txt文件的作用
定义编译规则的文件
3.2 最常用的cmakelists宏
cmake_minimum_required()CMake版本project()项目名称find_package()添加依赖catkin_package()编译生成信息导出add_executable()生成可执行文件target_link_libraries()可执行文件链接到库
3.3 其他的cmakelists宏
add_message_files()添加话题消息类型文件add_service_files()添加服务消息类型文件add_action_files()添加行为消息类型文件generate_messages()生成消息文件include_directories()添加头文件路径install()安装规则add_dependencies()添加依赖项add_library()生成自定义的库
四. package.xml
4.1 package.xml文件的作用
功能包的描述信息
4.2 必要的package.xml标签
<package format="2"> 根标签
...
</package>
<name> 包名
<license> 开源许可
<maintainer> 维护者
<description> 描述
<version> 版本号
五. Launch文件和参数服务器
5.1 Launch标签总览
Launch文件:可实现多节点启动和参数配置的xml文件
<launch> ... </launch> : 根标签
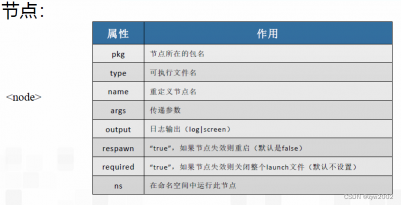
<node> :启动节点
<include> :嵌套,包含其他launch文件,其他XML文件
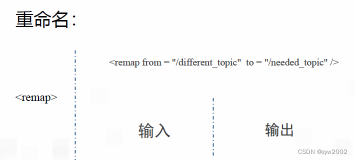
<remap> :重命名
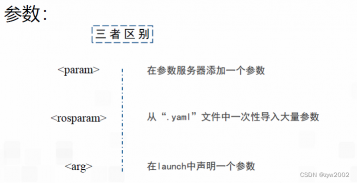
<param> :全局参数
<rosparam> :加载参数
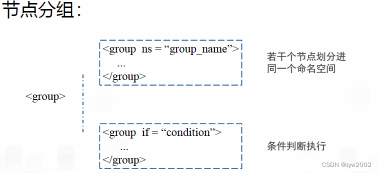
<group> :节点分组
<arg> :局部参数
<machine> :远程标签
<env> :环境变量
<test> :测试节点
- 节点
# 模板
rosrun <package_name> <executable|python>
<node pkg="package_name" type="executable|python" name="node_name" />
# 示例
<node pkg="turn_on_wheeltec_robot" type="wheeltec_robot_node" name="wheeltec_robot">
5.2 参数服务器
rosparam list : 列出参数服务器中的参数
rosparam get : 获取参数
rosparam set : 设置参数
rosparam delete : 删除参数
rosparam load : 从文件中加载参数到参数服务器
rosparam dump : 将参数服务器的参数写入文件
六. ROS话题

- 一种一对多、异步的通信机制
一对多:一个话题可以有多个订阅者
异步:发布者只管发布话题而不在意有多少个订阅者。
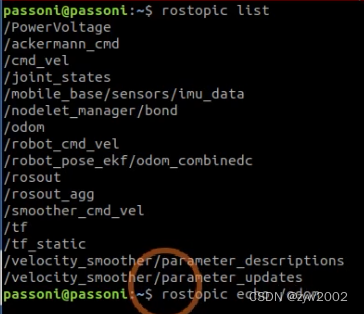
6.1 topic 命令行指令
rostopic echo :打印话题信息
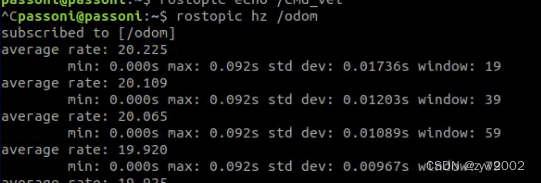
rostopic hz :话题频率
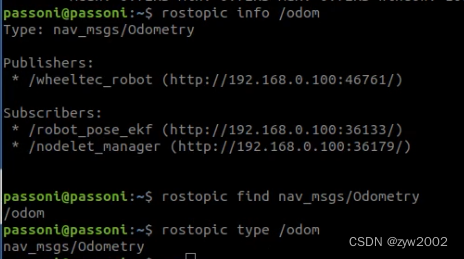
rostopic info :话题信息
rostopic list :列举话题
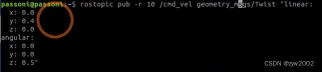
rostopic pub :往话题输入信息
rostopic bw :话题带宽
rostopic find :从数据类型寻找话题
rostopic type :查看话题的数据类型
6.2 发布话题
发布流程
①创建一个发布者
②创建消息数据
③消息赋值
④将消息发布出去
ros::Publisher pub = nh.advertise<std_msgs::String>("topic_name", queue size);
std_msgs::String str;
str.data = "hello world";
pub.publish(str);
6.3 订阅话题

①创建一个订阅者 Subscriber
②创建一个回调函数
void callback(const std_msgs::StringConstPtr& str)
{
...
}.
..
ros::Subscriber sub = nh.subscribe("my_topic", queue size, callback);
6.4 自定义消息类型数据
- 官方定义好的消息数据类型:
查看所有的消息数据类型:rosmsg list
显示消息类型的内容rosmsg show
查看某个话题的消息数据类型:rostopic type /topic_name | rosmsg show - 自定义消息类型的步骤
①自定义msg文件
在功能包下,新建一个msg的文件夹,并在该文件夹下新建一个test.msg的文件。 并在该文件中编辑消息数据类型。 ②添加编译规则
②添加编译规则
# CMakeLists.txt
find_package (catkin REQUIRED COMPONENTS roscpp std_msgs message_generation)
add_message_files( FILES Message1.msg )
generate_messages( DEPENDENCIES std_msgs )
catkin_package( ... CATKIN_DEPENDS message_runtime ... )
在find_package中添加message_generation、std_msgs、roscpp

在catkin_package中添加message_runtime

在catkin_package前面加入add_message_files和generate_messages
在package.xml 中添加如下依赖:
package.xml:
<build_depend>message_generation</build_depend>
<exec_depend>message_runtime</exec_depend>
③添加描述规则
在CMakeLists.txt中添加如下内容:

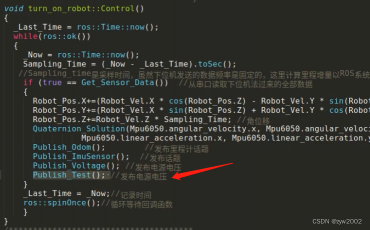
在wheeltec_robot.cpp文件中添加#include "功能包名/test.h"
#include "turn_on_wheeltec_robot/test.h"
然后添加发布者
test_publisher =n.advertise<turn_on_wheeltec_robot::test>("test_topic",10);
以及发布函数
Publish_Test();

在wheeltec_robot.h文件中添加发布者
ros::Publisher test_publisher;
以及发布函数
void Publish_Test();
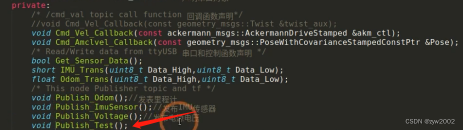
然后重新编译功能包。
七. 把ROS和STM32联系起来
7.1 两种控制器的功能
-
ROS主控
例如jason nano等
①雷达信息采集
②摄像头信息采集
③路径规划 -
STM32控制器
①里程计信息采集(odom,电机的转速)
②陀螺仪信息采集(imu,xyz三轴角速度和加速度)
③电机控制(控制运动底盘的运动) -
通信内容
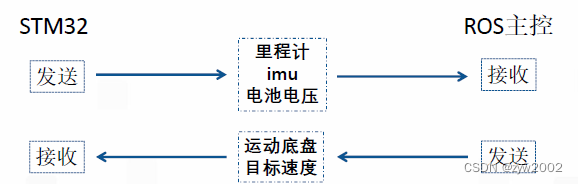
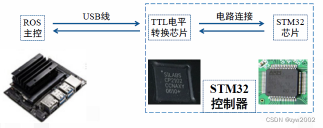
-
硬件连接
7.2 软件设置
-
软件设置
①更改CP2102芯片的serial
wheeltec_udev.sh
②创建设备别名
CP21xx Customization Utility .exe -
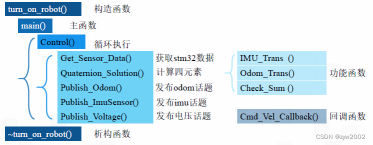
wheeltec_robot.cpp文件
八. ROS传感器的介绍
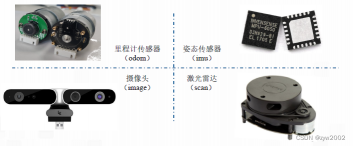
8.1 激光雷达
-
实现的功能
①建图
②导航
③避障
④跟随 -
开启雷达
roslaunch rplidar_ros rplidar.launch -
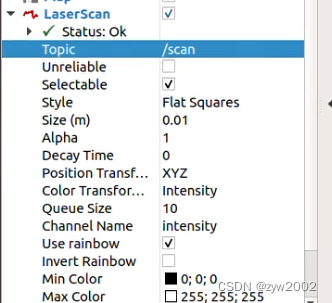
订阅雷达话题
/scan sensor_msgs/LaserScan
Header header
float32 angle_min
float32 angle_max
float32 angle_increment
float32 time_increment
float32 scan_time
float32 range_min
float32 range_max
float32[] ranges
float32[] intensities
8.2 摄像头
-
实现的功能
①视觉巡线
②物体识别
③3D建图
④颜色跟踪 -
开启摄像头
roslaunch usb_cam usb_cam-test.launchroslaunch astra_camera astra.launchroslaunch astra_camera astra_pro.launch -
订阅摄像头话题
sensor_msgs/Image
Header header
uint32 height
uint32 width
string encoding
uint8 is_bigendian
uint32 step
uint8[] data
sensor_msgs/CompressedImage
Header header
string format
uint8[] data
九. RVIZ配置方法
-
首先打开终端,通过ssh命令连接到机器人上

-
运行导航的.launch文件

-
然后在虚拟机的终端重新打开一个窗口,运行rviz
-
点击add,添加一个机器人模型
有两种添加方式,一种是通过话题添加,一种是通过设备添加。在这里我们选择通过设备添加。 -
添加TF坐标
-
添加一个全局地图和一个局部地图

-
添加雷达信息
-
添加全局路径和局部路径信息。
rqt可视化工具集
| 名称 | 功能 |
|---|---|
| Node Graph | 查看ros话题和节点通信的结构 |
| TF Tree | 查看tf坐标关系链接 |
| Plot | 图形化查看话题数据 |
| Dynamic Reconfigure | 实时调参 |
| Image View | 查看图片 |
| Bag | 记录/复现 ROS进程 |
-
Node Graph
指令:rqt_graph
-
TF Tree
指令:rosrun rqt_tf_tree rqt_tf_tree -
Plot
指令:rqt_plot -
Dynamic Reconfigure
指令:rosrun rqt_reconfigure rqt_reconfigure
注意:需要对应程序中,参数读取是以指针的形式才可以实时调参 -
Image View
指令:rqt_image_view -
Bag
# 记录所有话题
rosbag record -a
# 播放一次
rosbag play <name.bag>
# 倍速播放
rosbag play -r num <name.bag>
# 只播放某个话题
rosbag play <name.bag> --topic /topic_name
十一、TF坐标关系变换
TF用于两个坐标系之间的转换,包括平移和旋转。
-
TF树
运行指令:rosrun rqt_tf_tree rqt_tf_tree打开tf树。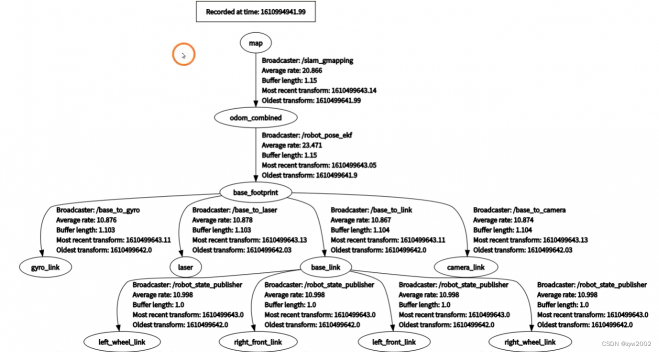
-
TF的frame_id
上图中椭圆中的名字就是tf的frame_id -
TF的broadcaster
两个坐标之间的关系需要broadcast广播。broadcast其实相当于rosnode, 可以用rosnode list查看。 -
TF的基坐标
所有TF坐标的根坐标。每个tf坐标都会索引到一个父坐标,直到索引到一个基坐标。 -
TF的消息数据类型
-
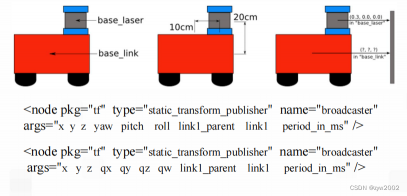
TF静态坐标变换
-
TF广播器和监听器
TF广播器
static tf2_ros::TransformBroadcaster br;
geometry_msgs::TransformStamped transformStamped;
...
transformStamped.xxx=xxx;
...
br.sendTransform( transformStamped );
TF监听器
tf2_ros::Buffer tfBuffer;
tf2_ros::TransformListener tfListener(tfBuffer);
geometry_msgs::TransformStamped transformStamped;
transformStamped = tfBuffer.lookupTransform("target","source",time);
评论(0)
您还未登录,请登录后发表或查看评论