


稳定是我们对系统最基本也是最重要的要求之一,是工程师们时刻关注的性能指标。本文从感性上介绍什么是稳定。
稳定性是系统在收到扰动后回到正常状态的能力,这里扰动和响应都是有界的,因此也被称作 Bounded-input-bounded-output stability。稳定具体可分为三类:稳定,临界稳定和不稳定。
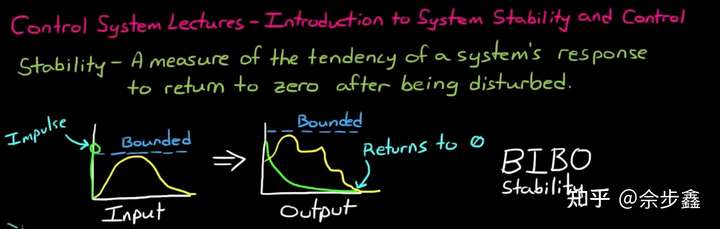
举例说明下。下图左侧第一个,在有摩擦的凹槽内有个小球,受到短暂F作用力,在不飞出去(F大小有界)的前提下,小球会左右摆动并最终静止,这说明是稳定的系统,F产生的扰动(位移)最终归于0;当凹槽内没有摩擦的时候,小球会围绕最低点左右摆动,最大位移保持不变,形成临界稳定;最右侧是典型的不稳定系统,球碰一下就飞了。

实际上,稳定是针对整个系统而言的,上述例子是典型的开环系统,没有加任何的控制。我们可以加入控制器,通过设计恰当的控制器,原本不稳定的系统会变的稳定。
如下图所示,对右侧不稳定的小球,设计一个闭环控制系统使小球变得稳定。在两侧安装两个电风扇,和雷达感应器,当雷达感应到小球偏离中心点时,使劲吹风,小球最终会乖乖回到原点,这样整个系统就具备了稳定性。
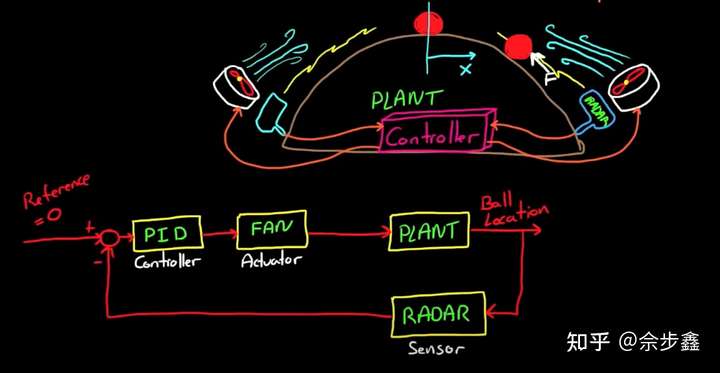
自动控制理论就是想设计合理的控制器,使得系统最终可控(able to track reference)和稳定(stability)。
注:文中图片来自油管博主Brian Douglas视频。



评论(0)
您还未登录,请登录后发表或查看评论