

申明:由于项目需要,特地查找双击启动程序以及开机自启功能,但由于使用第三方库结果都以失败告终,在自己摸索之后,终于实现了想要的功能,以下是本人亲自走过的流程,现在分享出来一起学习与交流!
程序运行所需环境:
运行系统:Ubuntu16.04
运行环境:ROS Kinetic
程序语言:Ubuntu1604自带的Python2.7以及sh脚本文件
双击启动程序
一、在桌面上新建一个Auto.sh脚本文件
1、文件里面内容如下:
#! /bin/bash
# 开头这句话必不可少
source /opt/ros/kinetic/setup.bash # 启动ros环境
gnome-terminal -x bash -c "roscore" & # 启动roscore命令
sleep 2
gnome-terminal -x bash -c "rviz" & # 启动rviz点击保存关闭。
2、打开终端在桌面目录下执行以下命令进行权限设置:
sudo chmod +x Auto.sh二、添加一个Terminal到桌面
在home中搜索Terminal,找到后拖到桌面上,如下图所示
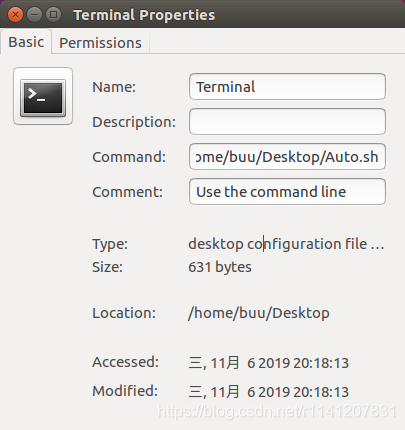
三、设置Terminal启动命令
在桌面的Terminal图标上右键菜单里选择Properties,然后在Command那一栏中填入Auto.sh文件的路径,如下图所示:
(获取路径方法:可以直接在Auto.sh文件上右键点击copy,然后在Command里面粘贴即可。)
然后点击关闭按钮进行关闭。(也可以顺便更换图标,点击左上角那个图标,选择需要更换的图片即可,也可以重命名图标名称。)
四、双击启动程序
双击刚刚操作完的图标,即可启动基于ROS的rviz程序,如下图所示:
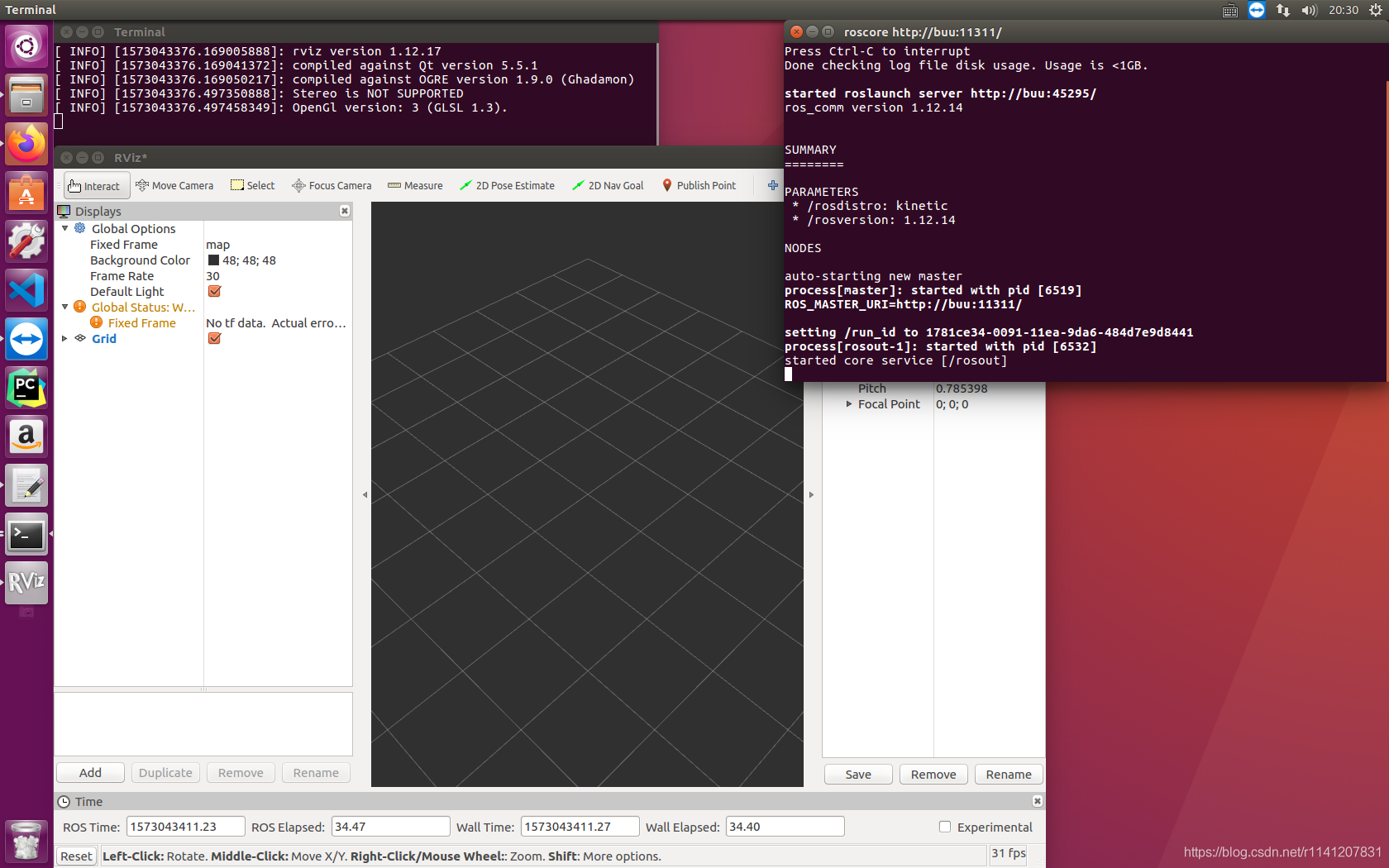
如果出现如上图所示的界面,说明运行成功了。
开机自启程序
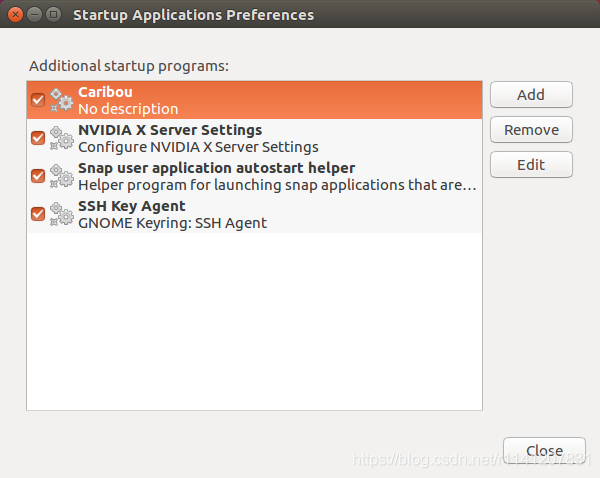
1、在home搜索:start,如下图所示:
打开之后如下图所示:
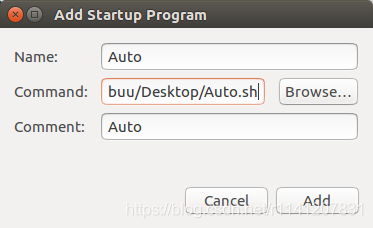
2、点击Add打开添加窗口,在Command里面添加Auto.sh文件的路径,如下图所示:
(获取路径方法:可以直接在Auto.sh文件上右键点击copy,然后在Command里面粘贴即可。)
添加完毕的窗口如下图所示:
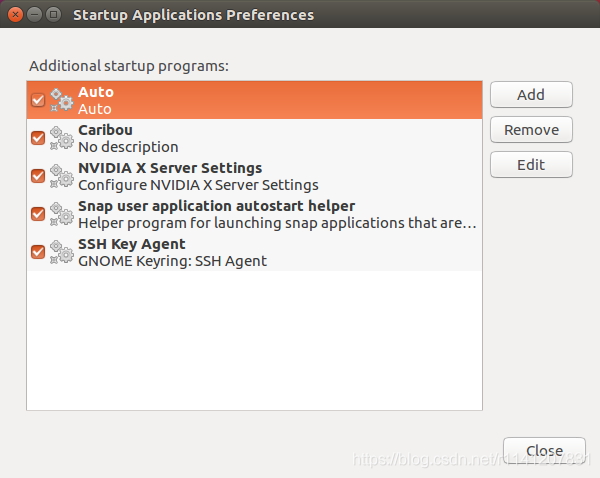
点击close即可。
3、这时候可以重启电脑即可看到,rviz程序也随机启动了。
至此双击启动以及开机启动 ROS程序rviz全部成功了。
可能有不周到之处,大家可以随时交流,谢谢浏览。
")


评论(0)
您还未登录,请登录后发表或查看评论