

Webots+Matlab:使用Simulink搭建RHex控制器(3)
在上一篇文章中我们已经成功搭建了simulink模型,并让机器人动了起来,接下来我们将模仿油管上的相关操作,在simulink模型中添加一下可视化和可以直接进行操作的块,来实现一些功能。
5.完善simulink模型
首先是实现动态的调节输入,让我们在机器人仿真时能够通过拖动的方式实现机器人的执行机构控制。
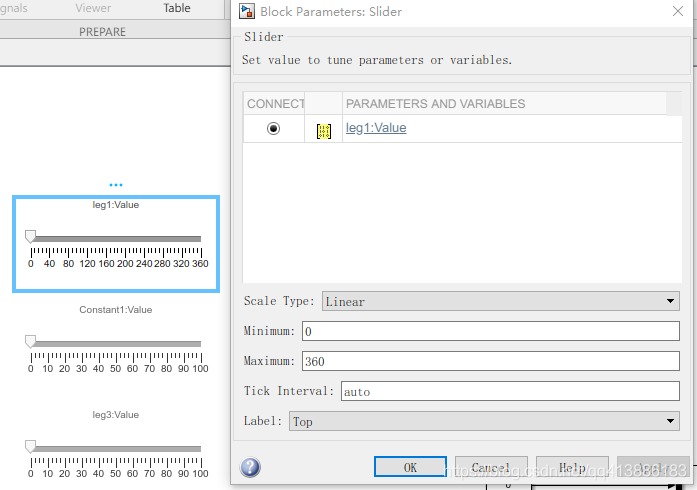
在此处用到的模块是Slider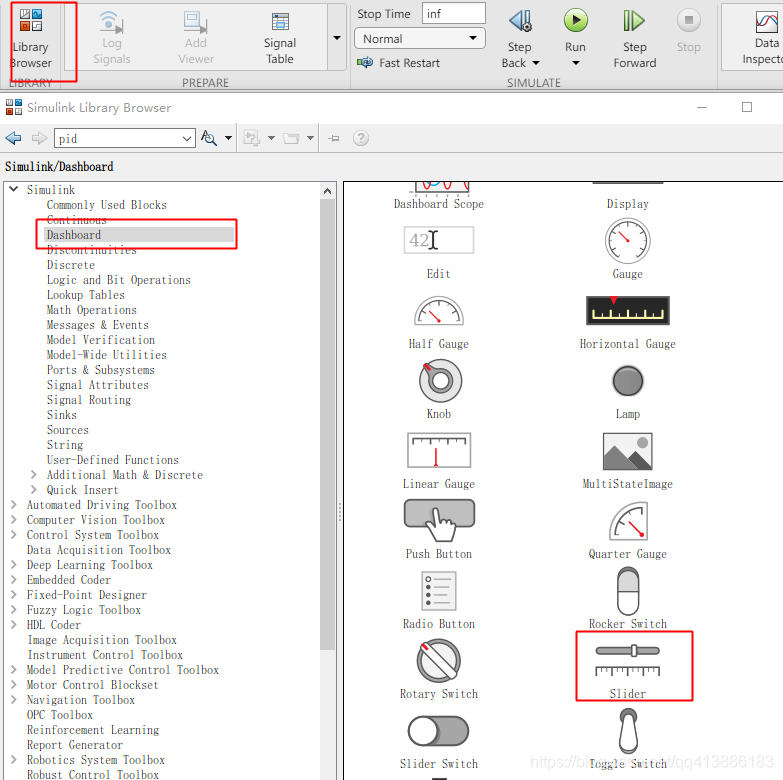
拖入simulink中,点击模块,上方会出现链接按钮,点击并选中一个constant模块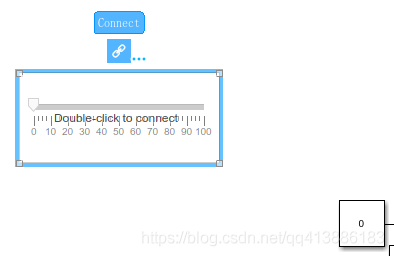
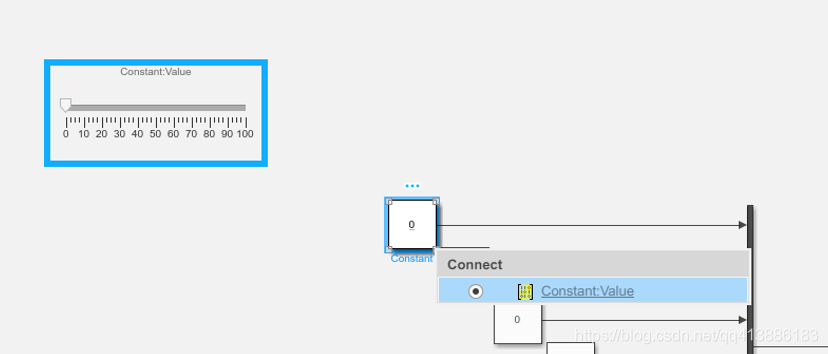
按ESC退出链接模式,此时拖动滑块即可调整constant模块的大小,接下来如法炮制,添加六个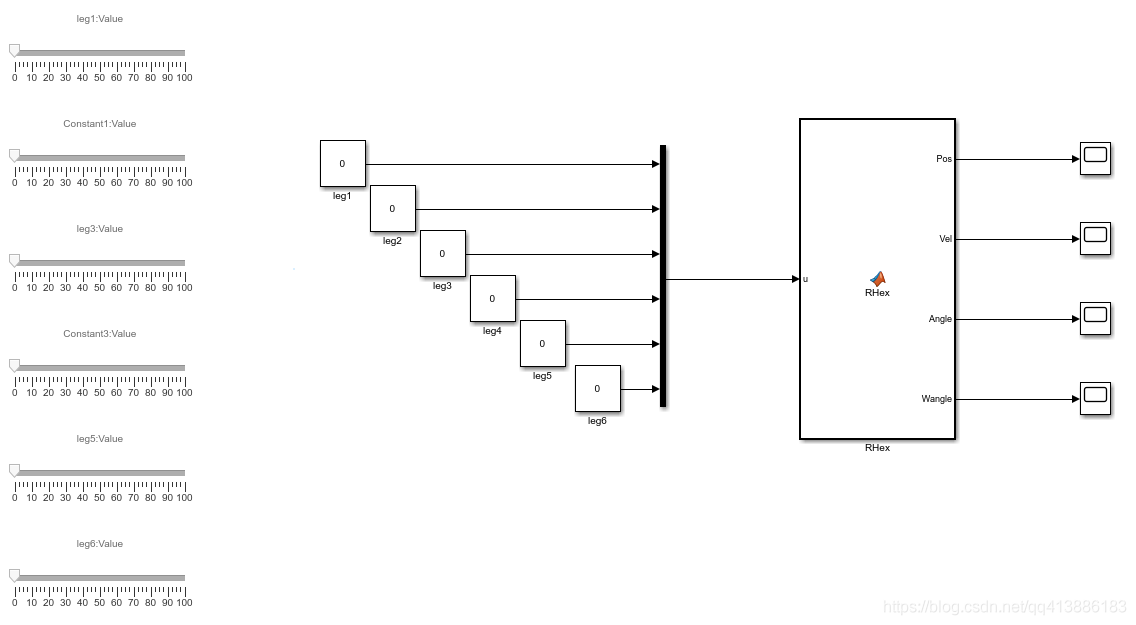
由于RHex块输入的是弧度值,不太好控制,因此我们把滑块设置为角度值,双击打开设置滑动取值范围为0-360度
角度值的constant到Rhex的弧度输入,需要在中间添加转换模块使用gain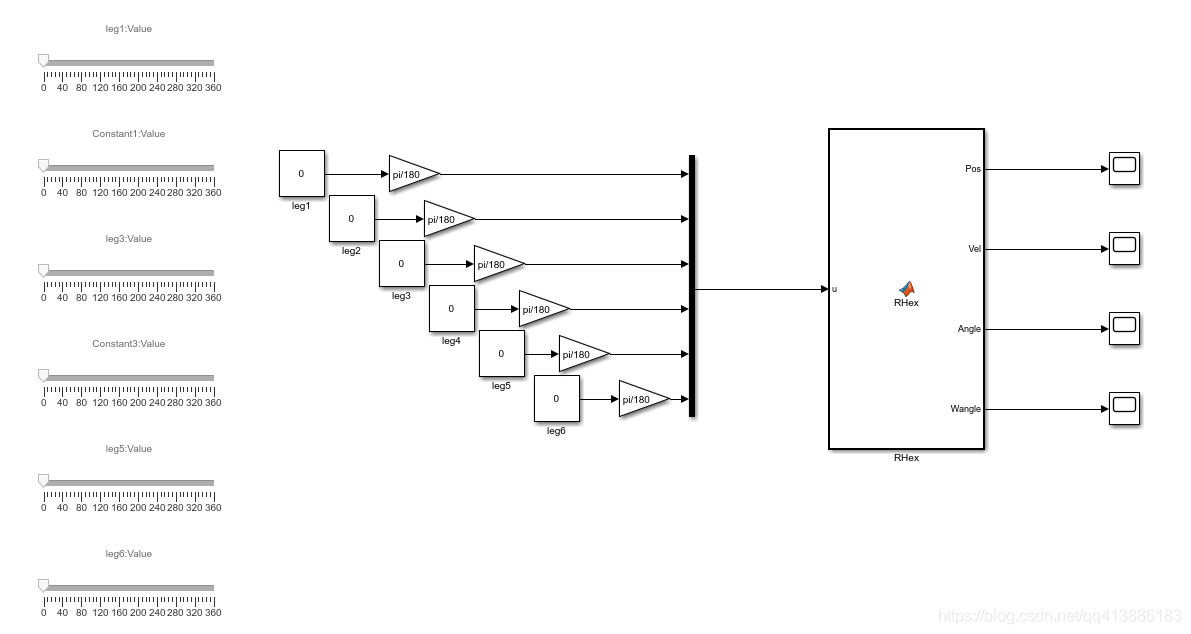
接下来跑一下看看效果
这样实时操作的模块就完成了,接下来做一下可视化的模块
使用Dashboard Scope
插入后点击链接,将其与RHex模块的位置输出连接起来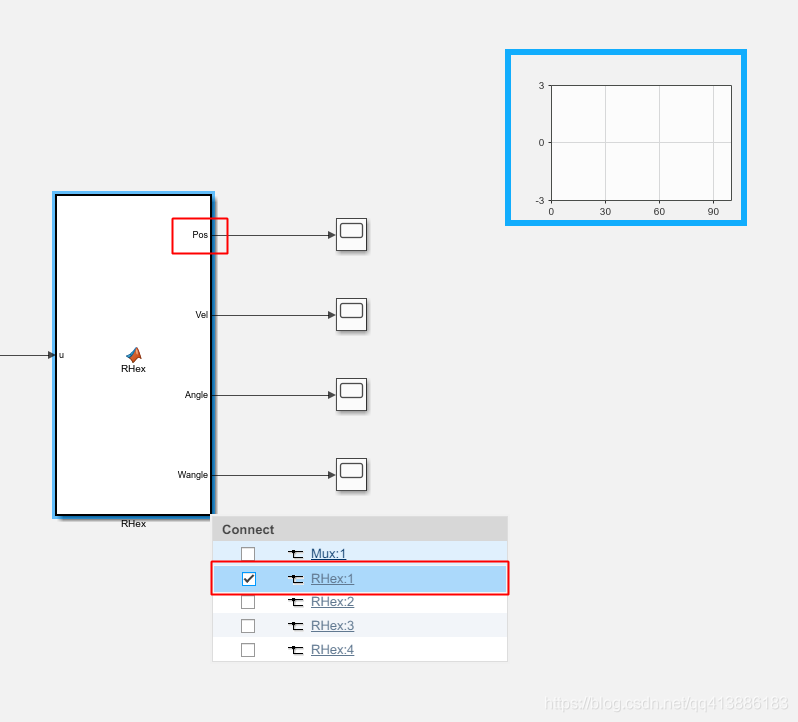
再次点击运行,即可实时描绘机器人的位置曲线了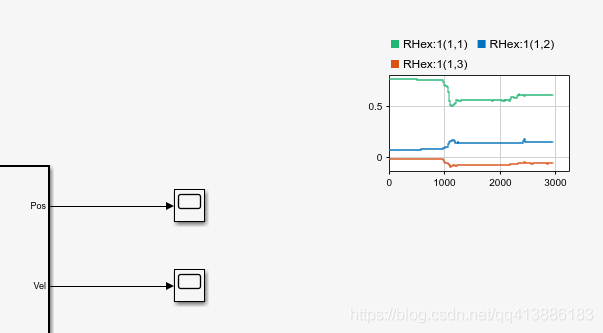
需要进一步添加查看其他信息的只需要如法炮制即可。
小结
通过该篇文章的介绍,基本可以看出使用上一篇介绍的启动simulink模块的方法的好处,我可以随时调整simulink模型,并不断进行调速,而不需要反复的启动关闭matlab。




评论(0)
您还未登录,请登录后发表或查看评论