

DroneKit与MAVProxy的通信与仿真验证
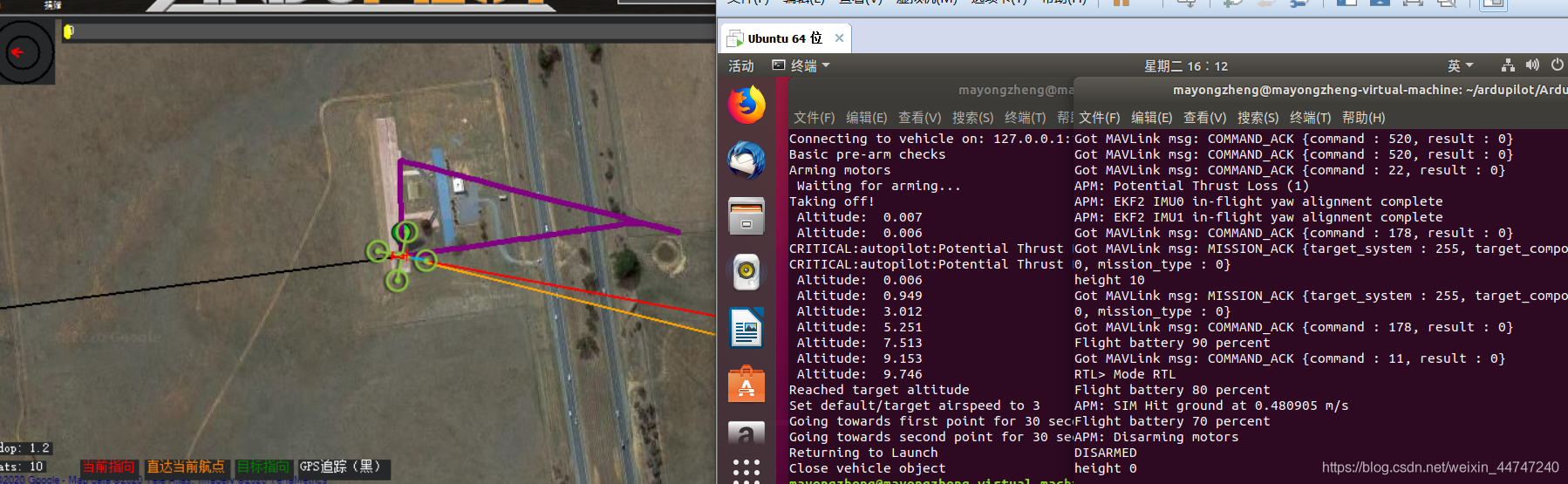
通过参照csdn大神沉迷学习的Roger,将搭建好的仿真环境MAVProxy,与已经和与飞控建立好通信的DroneKit两者进行结合,完成了整个的模拟仿真过程,先看一下结果图吧,具体操作方法如下:
以下过程的前提是建立在我以往帖子的基础上进行的,上篇文章讲了如何搭建一个MAVProxy的仿真环境,在这个基础上,运行之后,继续增加输出一个连接的节点,供dronekit连接
步骤如下:
运行仿真
cd ~/ardupilot/ArduCopter/
../Tools/autotest/sim_vehicle.py --map --console
增加节点,用于连接
output add 127.0.0.1:14551
连接之后,将测试程序中的连接节点改为更改后的节点,新建一个窗口进行运行。结果开始所示。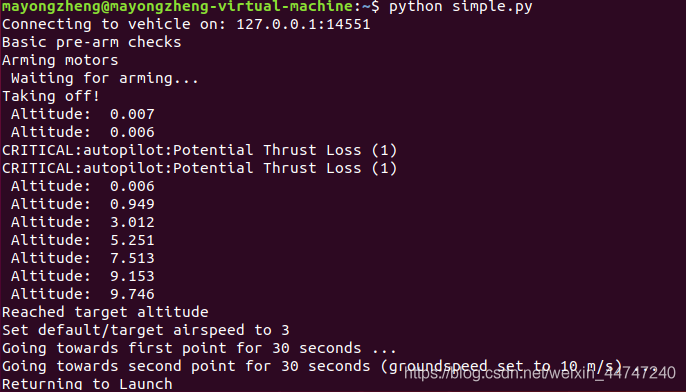
代码如下,具体为升高10m,往前30s,往右飞30s,然后切换模式,关闭连接。参考官方代码,验证了其可行性,暂时未进行修改,后面将针对自己任务进行控制。
#!/usr/bin/env python
# -*- coding: utf-8 -*-
"""
© Copyright 2015-2016, 3D Robotics.
simple_goto.py: GUIDED mode "simple goto" example (Copter Only)
Demonstrates how to arm and takeoff in Copter and how to navigate to points using Vehicle.simple_goto.
"""
from __future__ import print_function
import time
from dronekit import connect, VehicleMode, LocationGlobalRelative
# 通过本地的14551端口,使用UDP连接到SITL模拟器
connection_string = '127.0.0.1:14551'
print('Connecting to vehicle on: %s' % connection_string)
# connect函数将会返回一个Vehicle类型的对象,即此处的vehicle
# 即可认为是无人机的主体,通过vehicle对象,我们可以直接控制无人机
vehicle = connect(connection_string, wait_ready=True)
# 定义arm_and_takeoff函数,使无人机解锁并起飞到目标高度
# 参数aTargetAltitude即为目标高度,单位为米
def arm_and_takeoff(aTargetAltitude):
# 进行起飞前检查
print("Basic pre-arm checks")
# vehicle.is_armable会检查飞控是否启动完成、有无GPS fix、卡曼滤波器
# 是否初始化完毕。若以上检查通过,则会返回True
while not vehicle.is_armable:
print(" Waiting for vehicle to initialise...")
time.sleep(1)
# 解锁无人机(电机将开始旋转)
print("Arming motors")
# 将无人机的飞行模式切换成"GUIDED"(一般建议在GUIDED模式下控制无人机)
vehicle.mode = VehicleMode("GUIDED")
# 通过设置vehicle.armed状态变量为True,解锁无人机
vehicle.armed = True
# 在无人机起飞之前,确认电机已经解锁
while not vehicle.armed:
print(" Waiting for arming...")
time.sleep(1)
# 发送起飞指令
print("Taking off!")
# simple_takeoff将发送指令,使无人机起飞并上升到目标高度
vehicle.simple_takeoff(aTargetAltitude)
# 在无人机上升到目标高度之前,阻塞程序
while True:
print(" Altitude: ", vehicle.location.global_relative_frame.alt)
# 当高度上升到目标高度的0.95倍时,即认为达到了目标高度,退出循环
# vehicle.location.global_relative_frame.alt为相对于home点的高度
if vehicle.location.global_relative_frame.alt >= aTargetAltitude * 0.95:
print("Reached target altitude")
break
# 等待1s
time.sleep(1)
# 调用上面声明的arm_and_takeoff函数,目标高度10m
arm_and_takeoff(10)
# 设置在运动时,默认的空速为3m/s
print("Set default/target airspeed to 3")
# vehicle.airspeed变量可读可写,且读、写时的含义不同。
# 读取时,为无人机的当前空速;写入时,设定无人机在执行航点任务时的默认速度
vehicle.airspeed = 3
# 发送指令,让无人机前往第一个航点
print("Going towards first point for 30 seconds ...")
# LocationGlobalRelative是一个类,它由经纬度(WGS84)和相对于home点的高度组成
# 这条语句将创建一个位于南纬35.361354,东经149.165218,相对home点高20m的位置
point1 = LocationGlobalRelative(-35.361354, 149.165218, 20)
# simple_goto函数将位置发送给无人机,生成一个目标航点
vehicle.simple_goto(point1)
# simple_goto函数只发送指令,不判断有没有到达目标航点
# 它可以被其他后续指令打断,此处延时30s,即让无人机朝向point1飞行30s
time.sleep(30)
# 发送指令,让无人机前往第二个航点
print("Going towards second point for 30 seconds (groundspeed set to 10 m/s) ...")
# 与之前类似,这条语句创建了另一个相对home高20m的点
point2 = LocationGlobalRelative(-35.363244, 149.168801, 20)
# simple_goto将目标航点发送给无人机,groundspeed=10设置飞行时的地速为10m/s
vehicle.simple_goto(point2, groundspeed=10)
# 与之前一样,延时30s
time.sleep(30)
# 发送"返航"指令
print("Returning to Launch")
# 返航,只需将无人机的飞行模式切换成"RTL(Return to Launch)"
# 无人机会自动返回home点的正上方,之后自动降落
vehicle.mode = VehicleMode("RTL")
# 退出之前,清除vehicle对象
print("Close vehicle object")
vehicle.close()




评论(0)
您还未登录,请登录后发表或查看评论