

Ardupilot飞控固件的仿真模拟
主要写一下Linux上的仿真模拟环境的配置以及与windows端的地面站连接,仿真模拟不得不用,老早就想配置,一直无果,终究今天也算运行出来,写下来记录一下。上图:
主要参考官网和csdn魔城烟雨大佬的文章,再次跪拜。
环境是window10+ubuntu虚拟机
首先是安装必要的工具
sudo apt-get install python-dev dos2unix python-wxgtk2.8 python-matplotlib python-opencv python-pip g++ g++-4.7 gawk git ccache
sudo pip install pymavlink
sudo pip install mavproxy
获取ardupilot的代码进行配置
git clone https://github.com/ArduPilot/ardupilot
cd ardupilot
git submodule update --init --recursive
执行
Tools/environment_install/install-prereqs-ubuntu.sh -y
. ~/.profile
进入目录
cd ~/ardupilot/ArduCopter
出现下图,表示即将完成,这里第一次运行要挺长时间,慢慢等,加载完之后就可以进行模拟仿真了
../Tools/autotest/sim_vehicle.py --map --console
过程是十分漫长的
完成之后,就可以进入仿真控制界面了,我过程中可能有错误,最后map没有出现,不过不影响,通过windows的地面站可以进行监控。
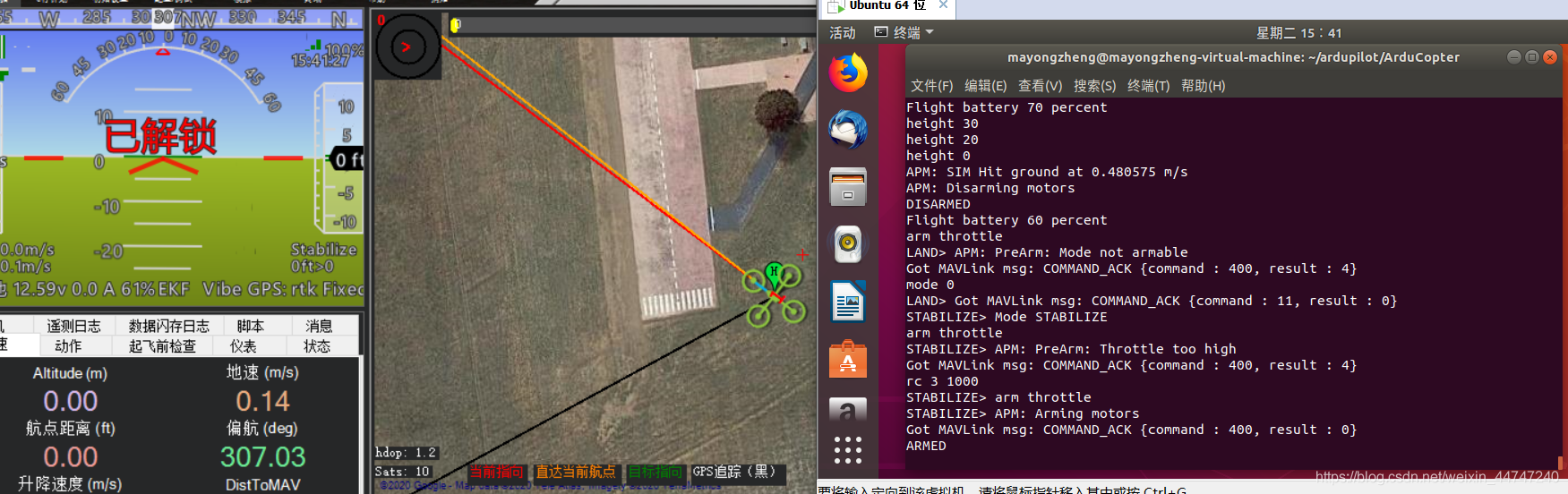
用地面站很简单,首先获取windows的IP,然后打开仿真后输入命令
output add 你的IP:14550
然后打开windows地面站,选择UDP连接,即可查看飞控状态及各种参数设置咯。
常用指令:
解锁arm throttle
给油rc 3 1800其他三通以此类推rc 1/2/3/4 数值
模式转换mode land,或者按模式代号来进行,如mode 9
部分常用模式如下:
悬停模式:mode LOITER
自稳模式:mode STABILIZE
悬停着落:mode LAND
返航模式:mode RTL
绕圈模式:mode CIRCLE
自动模式:mode AUTO
刹车模式:mode BRAKE
接下来就可以幸福的玩耍了,对了重启时reboot,命令可以去官网看一下,挺不错的哦。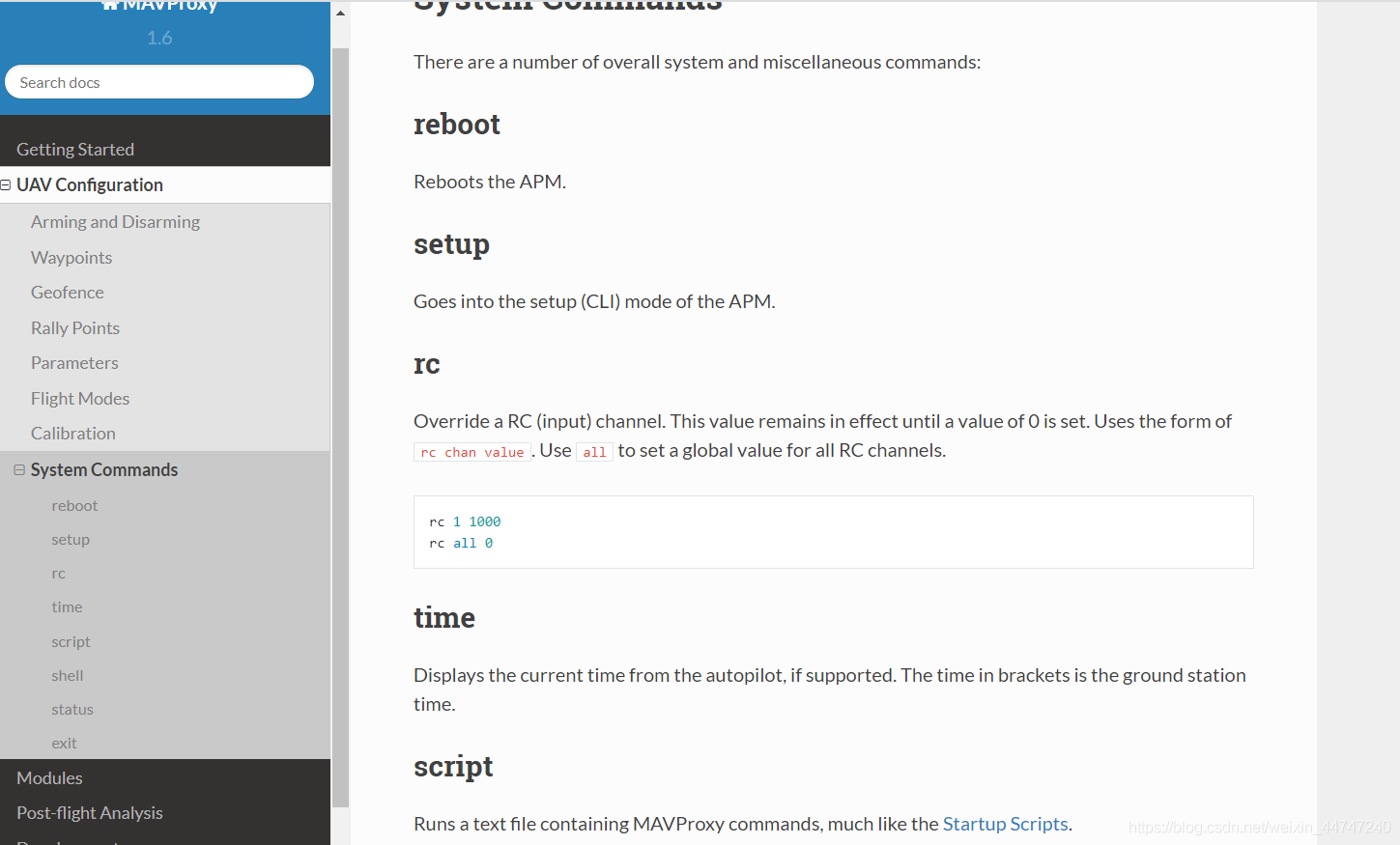




评论(0)
您还未登录,请登录后发表或查看评论