

S加减速–7段
接前文5段S形速度规划,这里推导一下7段S形曲线的计算公式1. S加减速曲线
定义:
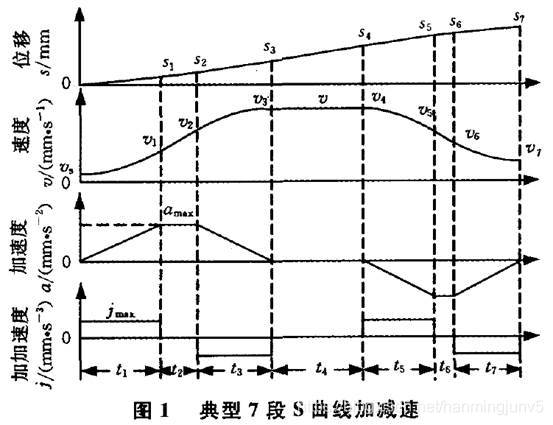
上图中,令t1-t7为各个位置的绝对时间节点,T1-T7为每一段的增量时间节点。
这里的定义和图中有些出入,线下面的计算全部按照此定义为准.计算公式:
加加速度j ( t ) = { J 0 ≤ t ≤ t 1 0 t 1 ≤ t ≤ t 2 − J t 2 ≤ t ≤ t 3 0 t 3 ≤ t ≤ t 4 J t 4 ≤ t ≤ t 5 0 t 5 ≤ t ≤ t 6 − J t 6 ≤ t ≤ t 7 j(t)=
j(t)=⎩⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎧J0−J0J0−J0≤t≤t1t1≤t≤t2t2≤t≤t3t3≤t≤t4t4≤t≤t5t5≤t≤t6t6≤t≤t7
加速度:a ( t ) = { J ∗ t 0 ≤ t ≤ t 1 J ∗ T 1 t 1 ≤ t ≤ t 2 J ∗ T 1 − J ∗ ( t − t 1 ) t 2 ≤ t ≤ t 3 0 t 3 ≤ t ≤ t 4 − J ∗ ( t − t 4 ) t 4 ≤ t ≤ t 5 − J ∗ T 4 t 5 ≤ t ≤ t 6 − J ∗ T 4 + J ∗ ( t − t 6 ) t 6 ≤ t ≤ t 7 a(t)=
a(t)=⎩⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎧J∗tJ∗T1J∗T1−J∗(t−t1)0−J∗(t−t4)−J∗T4−J∗T4+J∗(t−t6)0≤t≤t1t1≤t≤t2t2≤t≤t3t3≤t≤t4t4≤t≤t5t5≤t≤t6t6≤t≤t7
速度:v ( t ) = { v s + J ∗ t 2 / 2 0 ≤ t ≤ t 1 v 1 + J ∗ T 1 ∗ ( t − t 1 ) t 1 ≤ t ≤ t 2 v 2 + J ∗ T 1 ∗ ( t − t 2 ) − J ∗ ( t − t 2 ) 2 / 2 t 2 ≤ t ≤ t 3 v 3 t 3 ≤ t ≤ t 4 v 4 − J ∗ ( t − t 4 ) 2 / 2 t 4 ≤ t ≤ t 5 v 5 − J ∗ T 5 ∗ ( t − t 5 ) t 5 ≤ t ≤ t 6 v 6 − J ∗ T 5 ∗ ( t − t 6 ) + J ∗ ( t − t 6 ) 2 / 2 t 6 ≤ t ≤ t 7 v(t)=
v(t)=⎩⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎧vs+J∗t2/2v1+J∗T1∗(t−t1)v2+J∗T1∗(t−t2)−J∗(t−t2)2/2v3v4−J∗(t−t4)2/2v5−J∗T5∗(t−t5)v6−J∗T5∗(t−t6)+J∗(t−t6)2/20≤t≤t1t1≤t≤t2t2≤t≤t3t3≤t≤t4t4≤t≤t5t5≤t≤t6t6≤t≤t7
位移:
s ( t ) = { v s ∗ t + J ∗ t 3 / 6 0 ≤ t ≤ t 1 s 1 + v 1 ∗ ( t − t 1 ) + J ∗ T 1 ∗ ( t − t 1 ) 2 / 2 t 1 ≤ t ≤ t 2 s 2 + v 2 ∗ ( t − t 2 ) + J ∗ T 1 ∗ ( t − t 2 ) 2 / 2 − J ∗ ( t − t 2 ) 3 / 6 t 2 ≤ t ≤ t 3 s 3 + v 3 ∗ ( t − t 3 ) t 3 ≤ t ≤ t 4 s 4 + v 4 ∗ ( t − t 4 ) − J ∗ ( t − t 4 ) 3 / 6 t 4 ≤ t ≤ t 5 s 5 + v 5 ∗ ( t − t 5 ) − J ∗ T 5 ∗ ( t − t 5 ) 2 / 2 t 5 ≤ t ≤ t 6 s 6 + v 6 ∗ ( t − t 6 ) − J ∗ T 5 ∗ ( t − t 6 ) 2 / 2 + J ∗ ( t − t 6 ) 3 / 6 t 6 ≤ t ≤ t 7 s(t)=
s(t)=⎩⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎧vs∗t+J∗t3/6s1+v1∗(t−t1)+J∗T1∗(t−t1)2/2s2+v2∗(t−t2)+J∗T1∗(t−t2)2/2−J∗(t−t2)3/6s3+v3∗(t−t3)s4+v4∗(t−t4)−J∗(t−t4)3/6s5+v5∗(t−t5)−J∗T5∗(t−t5)2/2s6+v6∗(t−t6)−J∗T5∗(t−t6)2/2+J∗(t−t6)3/60≤t≤t1t1≤t≤t2t2≤t≤t3t3≤t≤t4t4≤t≤t5t5≤t≤t6t6≤t≤t7



评论(0)
您还未登录,请登录后发表或查看评论