

芯片概述(回忆)
STC 89C52RC电气特性
管脚定义
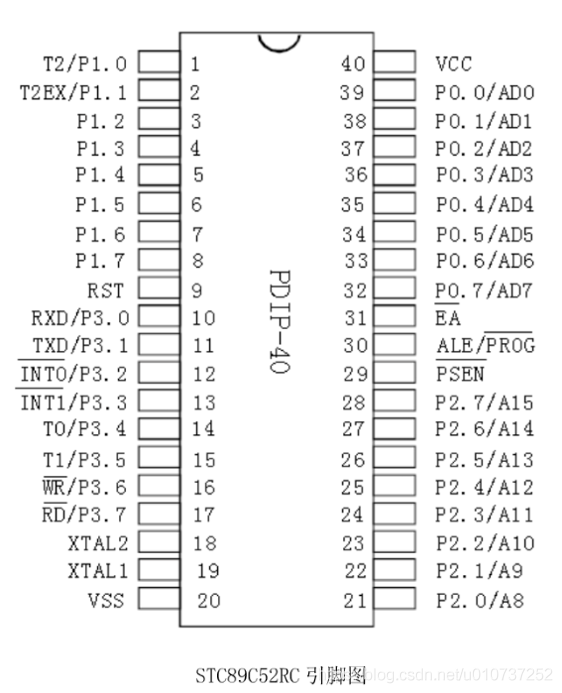
| 管脚符号 | 管脚序号 | 管脚含义 | 备注 |
|---|---|---|---|
| T2/P1.0 ~ P1.7 | 1 ~ 8 | 带内部上拉电阻的8位双向I/O口 | 可输入或输出数据。同时可做定时器/计数器2的的外部技术输入(P1.0/T2)和触发输入(P1.1/T2EX) |
| RST | 9 | 复位输入 | 用来完成单片机单片机的复位初始化操作 |
| RXD/P3.0 | 10 | 串行输入口 | 使用USB转TTL下载器烧写程序时,此接口一般接下载器的TXD引脚 |
| TXD/P3.1 | 11 | 串行输出口 | 使用USB转TTL下载器烧写程序时,此接口一般接下载器的RXD引脚 |
| INTO/P3.2 | 12 | 外部中断口0 | |
| INT1/P3.3 | 13 | 外部中断口1 | |
| TO/P3.4 | 14 | 定时器0的外部输入 | |
| T1/P3.5 | 15 | 定时器1的外部输入 | |
| WR/P3.6 | 16 | 外部数据存储器写选通 | |
| RD/P3.7 | 17 | 外部数据存储器读选通 | |
| XTAL2 | 18 | 振荡器反相放大器的输入端 | |
| XTAL1 | 19 | 振荡器反相放大器和内部时钟发生电路的输入端 | |
| VSS | 20 | 接地(GND)端 | |
| P2.0/A8 ~ P2.7/A15 | 21 ~ 28 | 带内部上拉电阻的8位双向I/O端口 | 可输入或输出数据 |
| PSEN | 29 | 外ROM读选通信号 | 在访问片外程序存储器时,此端输出负脉冲作为存储器读选通信号 |
| ALE/PROG | 30 | 地址锁存允许/片内EPROM编程脉冲 | ALE:用来锁存P0口送出的低8位地址 PROG:片内有EPROM的芯片,在EPROM编程期间,此引脚输入编程脉冲 |
| EA | 31 | 访问外部程序存储器控制信号 | 为了执行内部程序指令,应该接电源正极 |
| P0.0/AD0 ~ P0.7/AD7 | 32 ~ 39 | 漏极开路的8位双向I/O口 | 可输入或输出数据 |
| VCC | 40 | 电源正极输入 | 接电源正极 |
补充表格注释: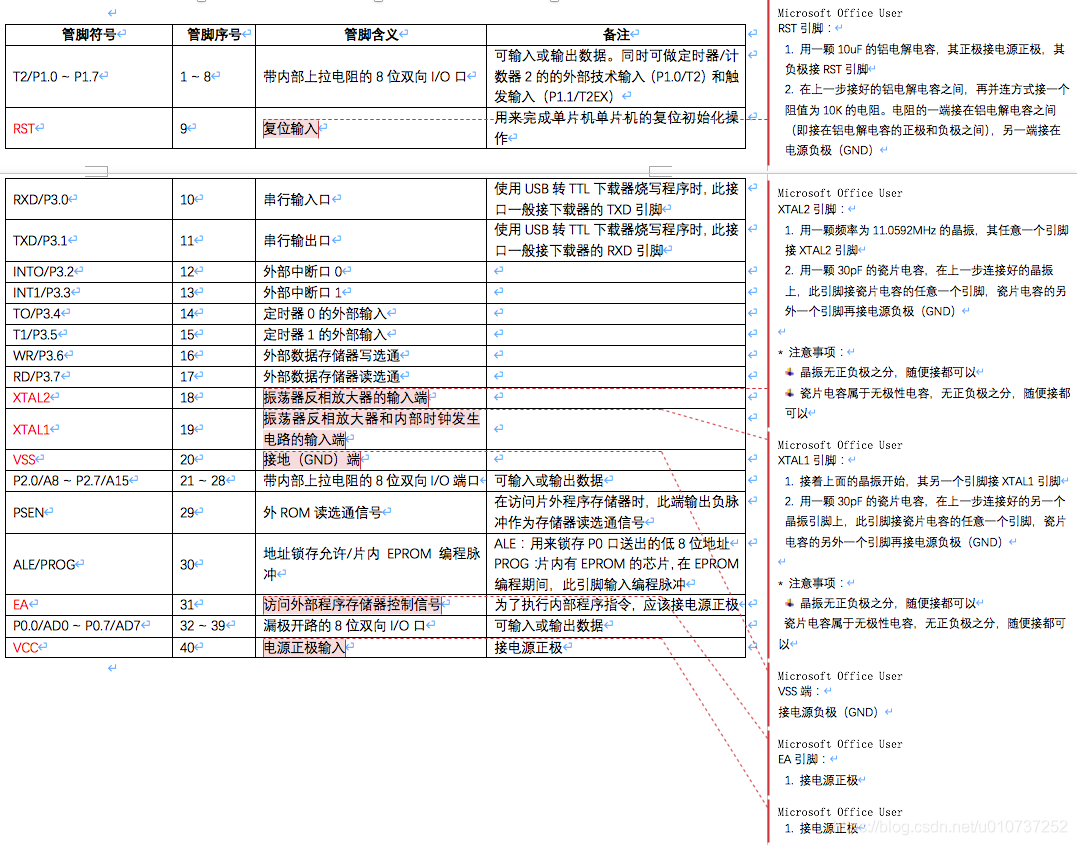
74HC595和74HC595D 电气特性
管脚定义(左:74HC595D 右:74HC595)
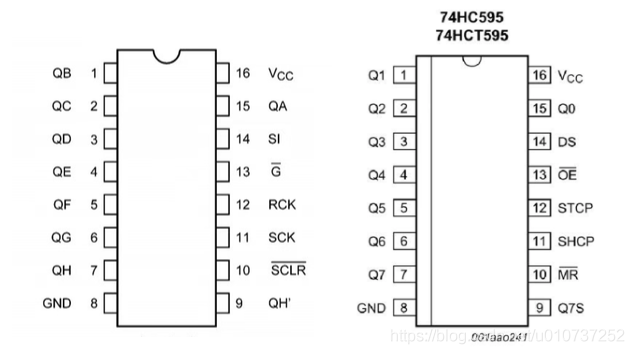
| 管脚符号 | 管脚序号 | 管脚含义 | 备注 |
|---|---|---|---|
| QA | 15 | 8位并行数据输出 | 分别接8颗独立的LED发光二极管 |
| QB | 1 | ||
| QC | 2 | ||
| QD | 3 | ||
| QE | 4 | ||
| QF | 5 | ||
| QG | 6 | ||
| QH | 7 | ||
| GND | 8 | 接地端 | 接树莓派的GND引脚 |
| Vcc | 16 | 电源正极输入 | 接树莓派的5V电源正极引脚 |
| SI | 14 | 串行数据输入 | 控制数据的输入。一般接树莓派定义好的GPIO引脚来接收树莓派的高低电平数据 |
| G | 13 | 输出使能控制端 | 是否要将数据输出到QA~QH引脚上 |
| RCK | 12 | 存储寄存器(锁存器)时钟输入 | 是否要将移位寄存器中的数据拷贝到存储寄存器(锁存器)中。一般接树莓派定义好的GPIO引脚来接收树莓派的数据实现上升沿 |
| SCK | 11 | 移位寄存器时钟输入 | 决定何时把SI引脚的数据存入移位寄存器中。一般接树莓派定义好的GPIO引脚来接收树莓派的数据实现上升沿 |
| SCLR | 10 | 移位寄存器清零输入 | 决定是否要重置所有的寄存器到初始状态。 |
| QH’ | 9 | 串行数据输出 | 接下一个74HC595D的SI引脚实现串联 |
补充表格注释: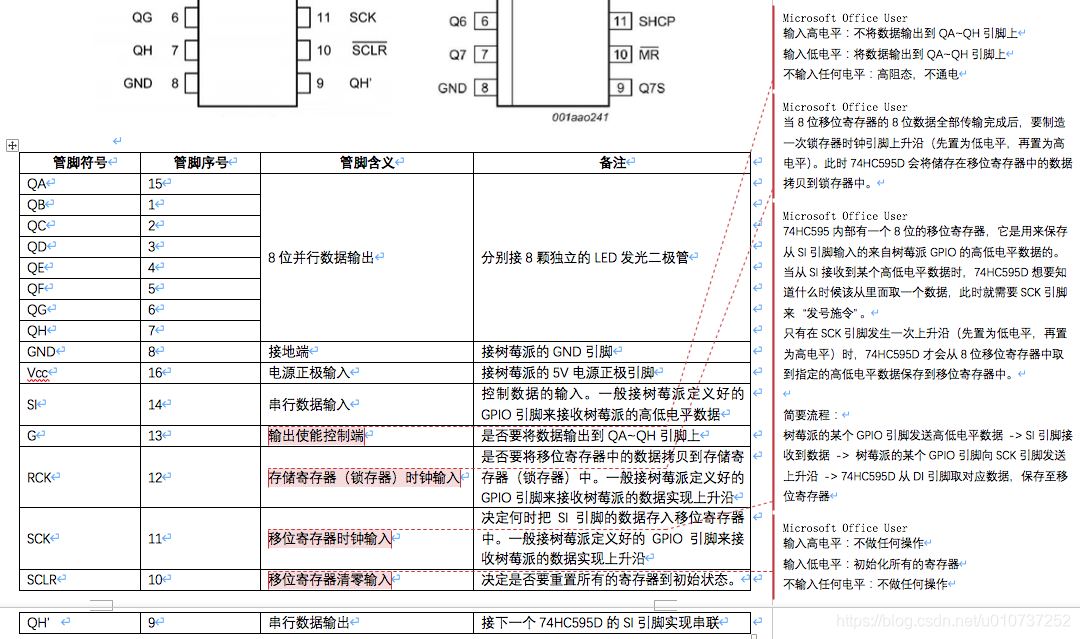
电路图
完整电路图
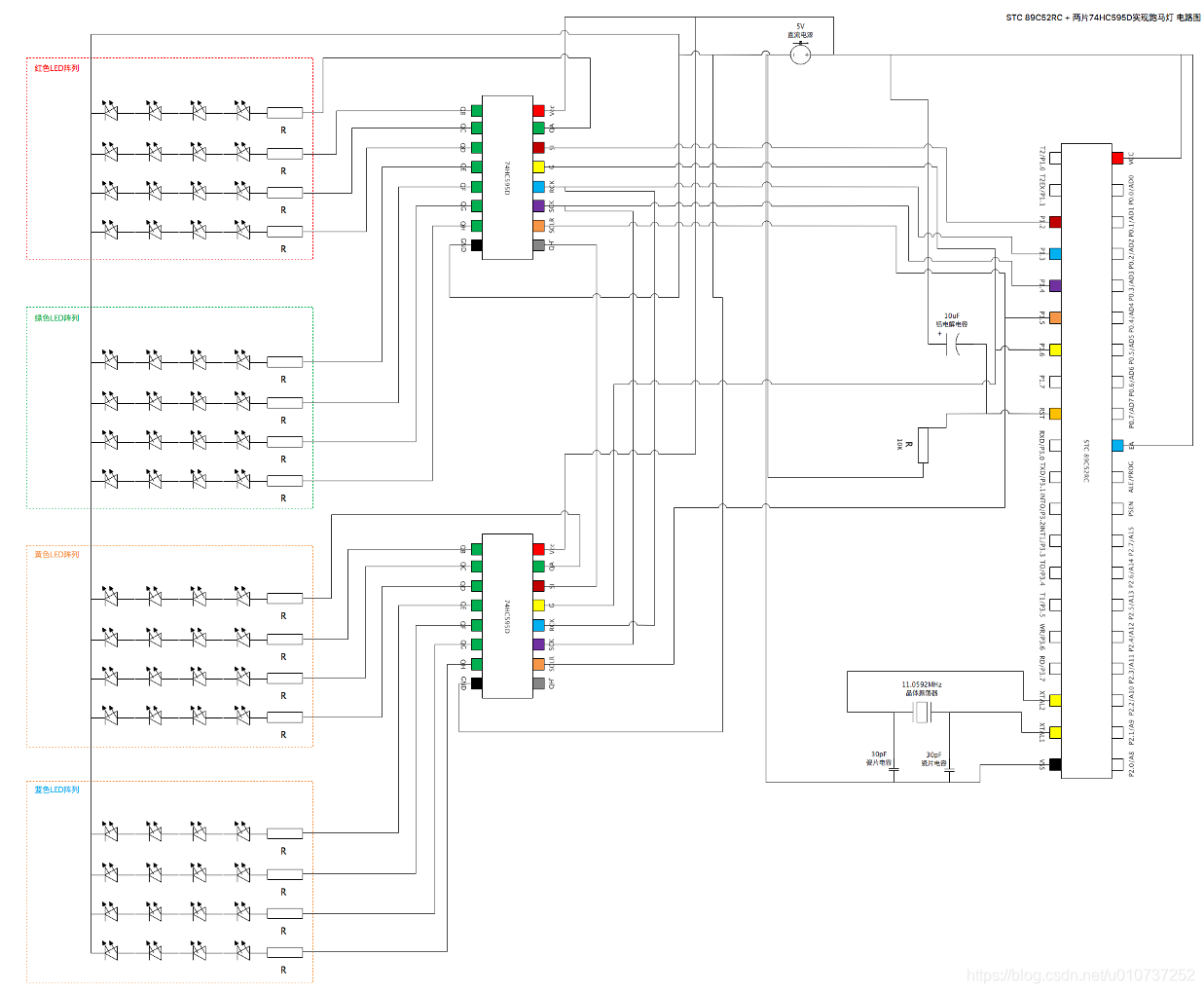
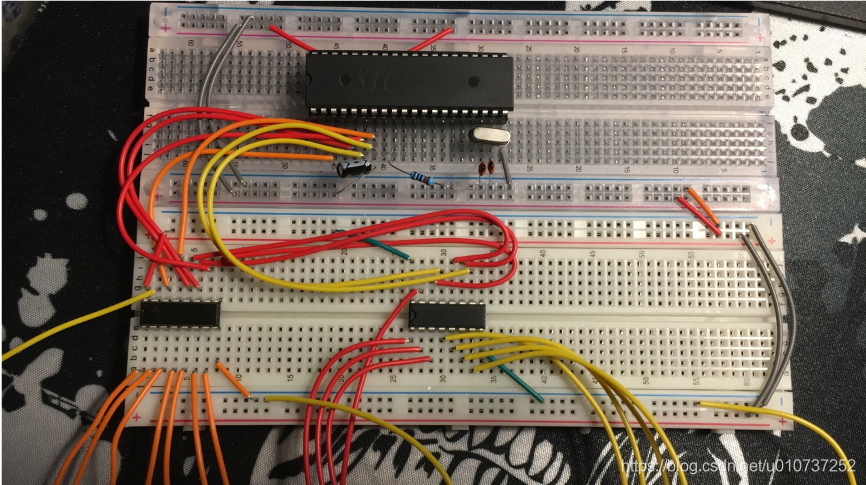
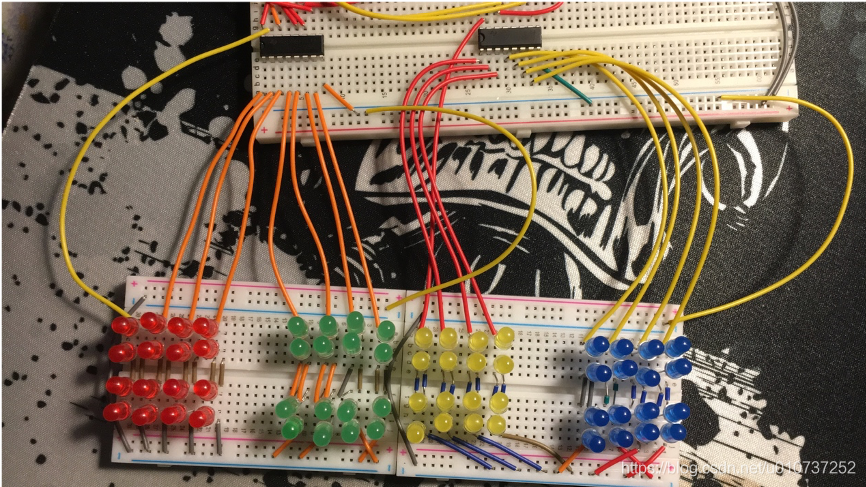
以下三张图分别是在面包板上搭建好的完整电路、最小系统+74HC595D串联电路和LED等阵列电路。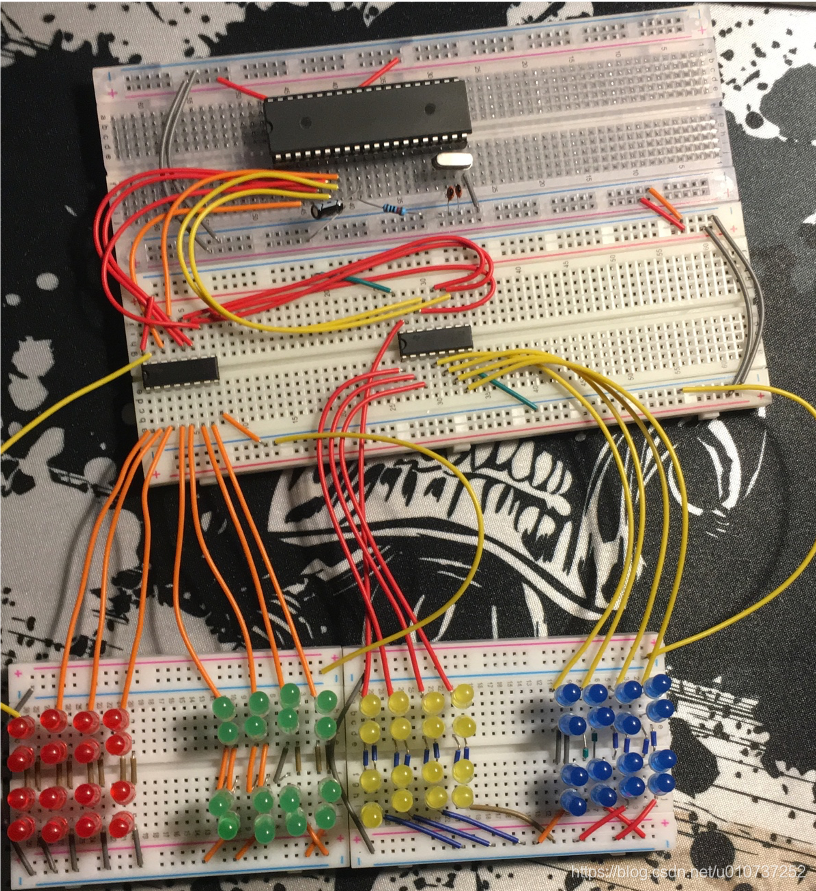
电路图分析
整体来看,从右到左,电路可分为三大部分:STC
89C52RC最小系统电路、74HC595D级联电路和LED发光二极管阵列电路。
| 完整电路连接分析表 | |||||
|---|---|---|---|---|---|
| STC 89C52RC最小系统电路部分 | |||||
| 源芯片名称 | 源芯片管脚符号 /管脚序号 | 连接到的目标芯片名称 | 连接到的目标芯片管脚符号 /管脚序号 | 接法解释 | 备注 |
| STC 89C52RC | RST / 9 | 10uF铝电解电容和10K电阻 | – | 最小系统必需 | |
| STC 89C52RC | XTAL2 / 18 | 11.0592MHz晶振和30pF瓷片电容 | – | 最小系统必需 | |
| STC 89C52RC | XTAL1 / 19 | 11.0592MHz晶振和30pF瓷片电容 | – | 最小系统必需 | |
| STC 89C52RC | VSS / 20 | 电源 | 电源负极/GND | 为STC 89C52RC提供电源回路 | |
| STC 89C52RC | EA / 31 | 电源 | 电源正极 | 让STC 89C52RC从内部读取程序执行 | |
| STC 89C52RC | VCC / 40 | 电源 | 电源正极 | 为STC 89C52RC提供工作电源 | |
| 74HC595D级联电路部分 | |||||
| 源芯片名称 | 源芯片管脚符号 /管脚序号 | 连接到的目标芯片名称 | 连接到的目标芯片管脚符号 /管脚序号 | 接法解释 | 备注 |
| 第一片74HC595D | QB / 1 | 红色LED阵列 | 第二排阵列正极 | 驱动红色LED阵列的第二排LED | |
| 第一片74HC595D | QC / 2 | 红色LED阵列 | 第三排阵列正极 | 驱动红色LED阵列的第三排LED | |
| 第一片74HC595D | QD / 3 | 红色LED阵列 | 第四排阵列正极 | 驱动红色LED阵列的第四排LED | |
| 第一片74HC595D | QE / 4 | 绿色LED阵列 | 第一排阵列正极 | 驱动绿色LED阵列的第一排LED | |
| 第一片74HC595D | QF / 5 | 绿色LED阵列 | 第二排阵列正极 | 驱动绿色LED阵列的第二排LED | |
| 第一片74HC595D | QG / 6 | 绿色LED阵列 | 第三排阵列正极 | 驱动绿色LED阵列的第三排LED | |
| 第一片74HC595D | QH / 7 | 绿色LED阵列 | 第四排阵列正极 | 驱动绿色LED阵列的第四排LED | |
| 第一片74HC595D | GND / 8 | 电源 | 电源负极 | 为第一片74HC595D提供电源回路 | |
| 第一片74HC595D | QH’ / 9 | 第二片74HC595D | SI / 14 | 串联下一片74HC595D | |
| 第一片74HC595D | SCLR / 10 | STC 89C52RC | P1.5 / 6 | 灵活控制LED的亮灭 | |
| 第一片74HC595D | SCK / 11 | STC 89C52RC | P1.4 / 5 | 控制何时将SI引脚上输入的串行数据移动到移位寄存器中 | |
| 第一片74HC595D | RCK / 12 | STC 89C52RC | P1.3 / 4 | 控制何时将移位寄存器中的数据拷贝到存储寄存器(锁存器)中 | |
| 第一片74HC595D | G / 13 | STC 89C52RC | P1.6 / 7 | 控制QA~QH是否输出数据 | |
| 第一片74HC595D | SI / 14 | STC 89C52RC | P1.2 / 3 | 输入串行数据 | |
| 第一片74HC595D | QA / 15 | 红色LED阵列 | 第一排阵列正极 | 驱动红色LED阵列的第一排LED | |
| 第一片74HC595D | Vcc / 16 | 电源 | 电源正极 | 为74HC595D提供工作电源 | |
| 第二片74HC595D | QB / 1 | 黄色LED阵列 | 第二排阵列正极 | 驱动黄色LED阵列的第二排LED | |
| 第二片74HC595D | QC / 2 | 黄色LED阵列 | 第三排阵列正极 | 驱动黄色LED阵列的第三排LED | |
| 第二片74HC595D | QD / 3 | 黄色LED阵列 | 第四排阵列正极 | 驱动黄色LED阵列的第四排LED | |
| 第二片74HC595D | QE / 4 | 蓝色LED阵列 | 第一排阵列正极 | 驱动蓝色LED阵列的第一排LED | |
| 第二片74HC595D | QF / 5 | 蓝色LED阵列 | 第二排阵列正极 | 驱动蓝色LED阵列的第二排LED | |
| 第二片74HC595D | QG / 6 | 蓝色LED阵列 | 第三排阵列正极 | 驱动蓝色LED阵列的第三排LED | |
| 第二片74HC595D | QH / 7 | 蓝色LED阵列 | 第四排阵列正极 | 驱动蓝色LED阵列的第四排LED | |
| 第二片74HC595D | GND / 8 | 电源 | 电源负极 | 为第二片74HC595D提供电源回路 | |
| 第二片74HC595D | QH’ / 9 | – | – | – | 如没有第三片74HC595D则不连 |
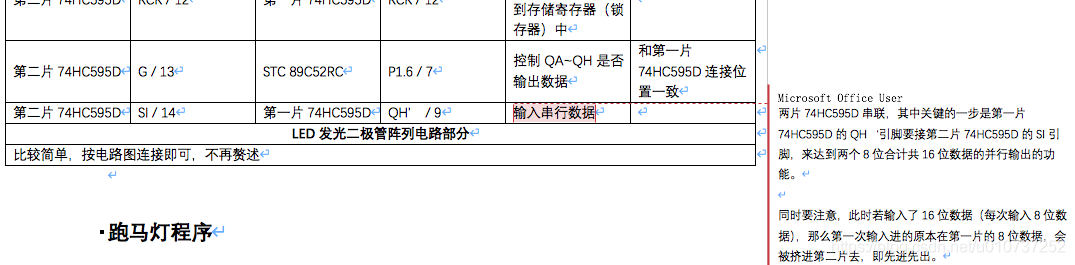
| 第二片74HC595D | SCLR / 10 | STC 89C52RC | P1.5 / 6 | 灵活控制LED的亮灭 | 和第一片74HC595D连接位置一致 |
| 第二片74HC595D | SCK / 11 | 第一片74HC595D | SCK / 11 | 控制何时将SI引脚上输入的串行数据移动到移位寄存器中 | |
| 第二片74HC595D | RCK / 12 | 第一片74HC595D | RCK / 12 | 控制何时将移位寄存器中的数据拷贝到存储寄存器(锁存器)中 | |
| 第二片74HC595D | G / 13 | STC 89C52RC | P1.6 / 7 | 控制QA~QH是否输出数据 | 和第一片74HC595D连接位置一致 |
| 第二片74HC595D | SI / 14 | 第一片74HC595D | QH’ / 9 | 输入串行数据 | |
| LED发光二极管阵列电路部分 | |||||
| 比较简单,按电路图连接即可,不再赘述 |
表格注释补充: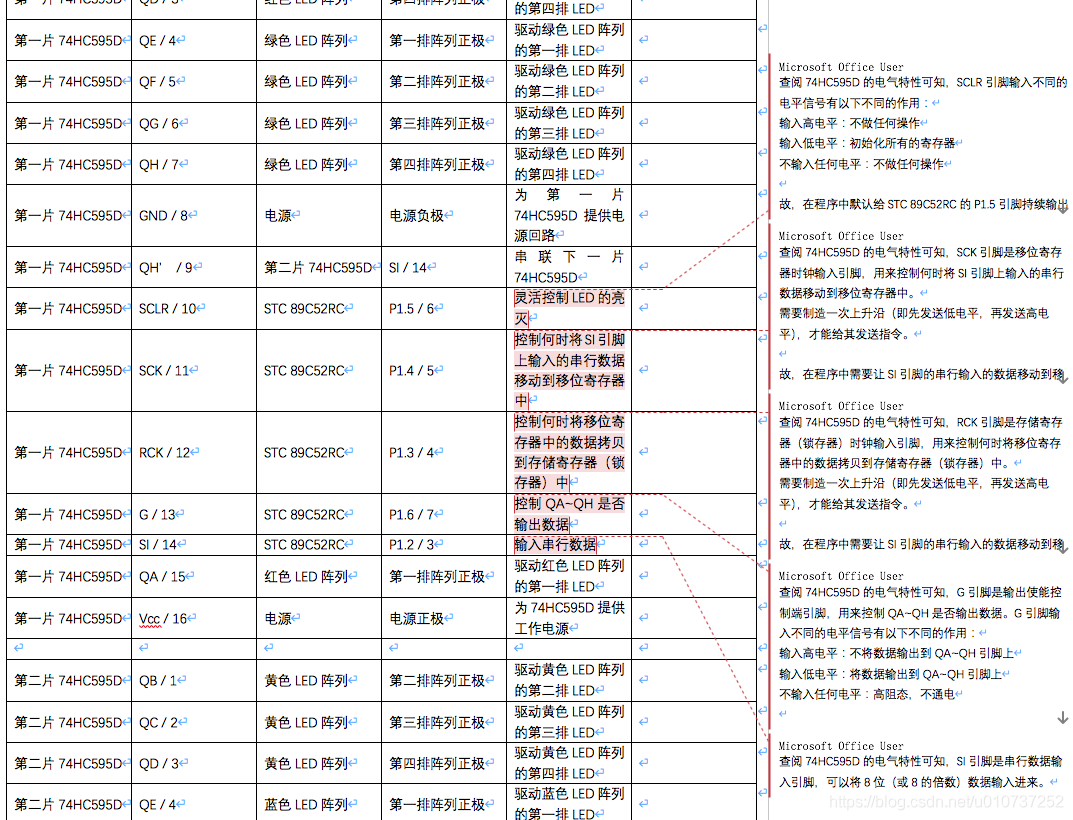
跑马灯程序
完整程序
执行C程序后,会看到16排LED发光二极管依次循环亮灭,行如流水。
程序:
https://gitee.com/stevejrong1024/water-lamp
文件:
labs/lab2.c
基础知识
- 十进制数转换二进制数:
十进制整数转换为二进制整数采用”除2取余,逆序排列”法。具体做法是:用2整除十进制整数,可以得到一个商和余数;再用2去除商,又会得到一个商和余数,如此进行,直到商为小于1时为止,然后把先得到的余数作为二进制数的低位有效位,后得到的余数作为二进制数的高位有效位,依次排列起来。
例:十进制数255转换二进制数为多少?
答: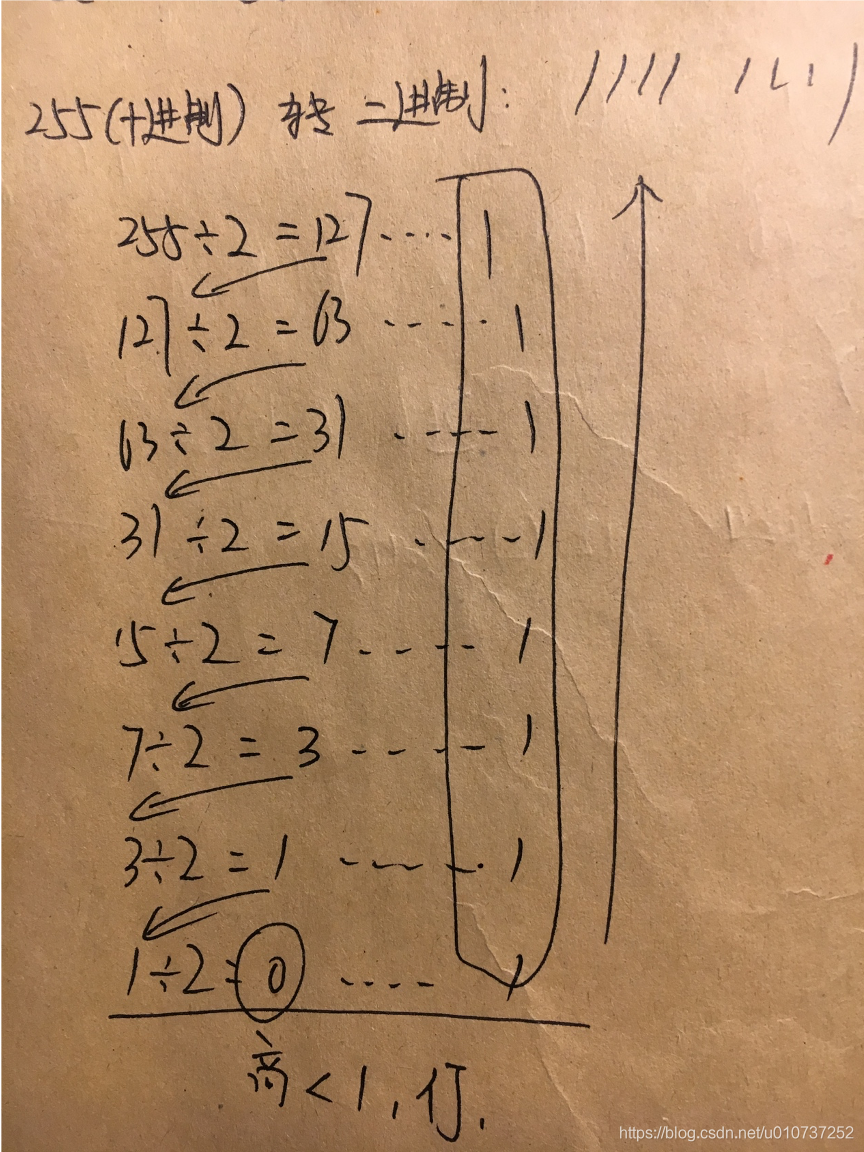
-
形如“0x”这样的表示法为十六进制的表示法。十六进制一般用数字0到9和字母A到F(或a~f)表示,其中A~F(或a~f)表示10~15,这些称作十六进制数字。
-
十六进制数转换十进制数:
16进制数的第0位的权值为16的0次方,第1位的权值为16的1次方,第2位的权值为16的2次方……
例:十六进制数 0x80、0xff、0xfe 转换十进制数分别为多少?
答: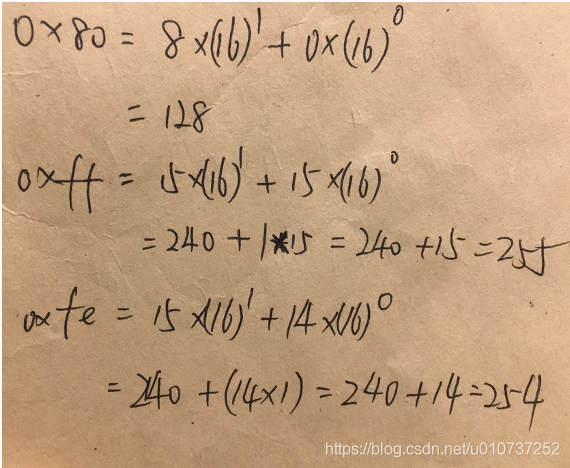
- 两个十进制数进行按位与运算:
按位与就是将两个数字或字符串,转换为二进制数之后,其中的每一位进行运算最后得出的一个新的二进制结果,将这个新得出的二进制数转换为十进制数,即为最终答案
按位与的运算规则:
两个要进行按位与运算的数字都转为二进制数后,每一位进行比较。若当前位中,两者的值都等于1,则新生成的二进制数中,此位的值就写为1,否则此位写0
例:十进制数7和十进制数9进行按位与运算,结果为多少?
答: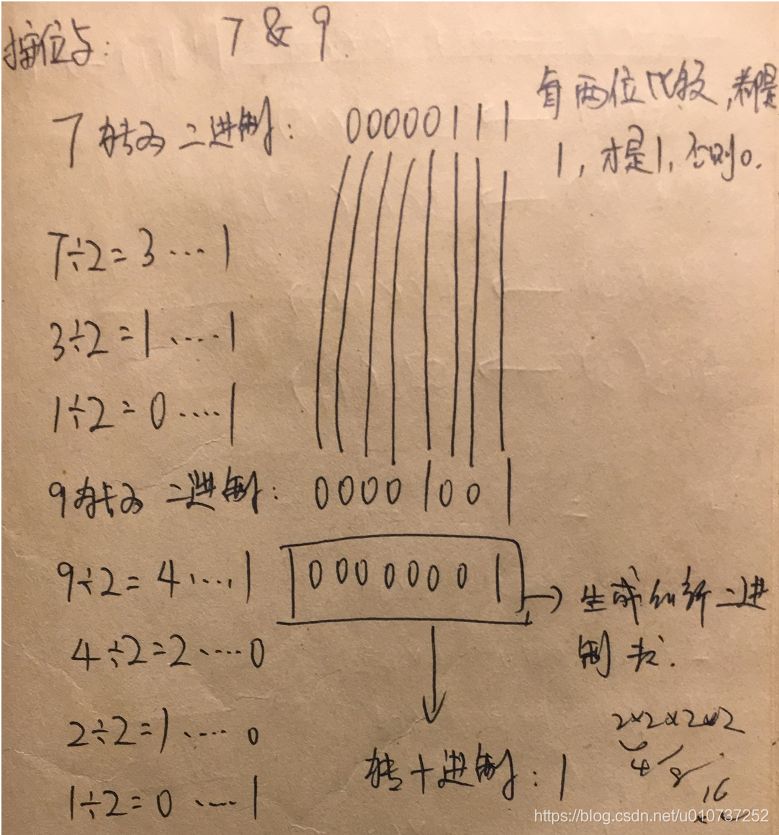
5. 循环左移运算:
在二进制表示法下,循环将位于二进制数最左边的一位移动到二进制数最右边,构成新的二进制数的操作。
例:十进制数1,左移一位后,结果为多少?
答:
在C语言中,没有现成的库能实现循环左移,使用一下自定义方法可实现循环左移:
/
_ 循环左移
_
_ @param sourceData 原始数据
_ @param bit 原始数据的位数。可选值:8、16、32
_ @param step 移动位数
_ @return
*/
int circularLeft(int sourceData, int bit, int step) {
return (sourceData << step) | (sourceData >> (bit - step));
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 可能用到的数字,其十进制、十六进制和二进制表示法大全:
| 十进制数 | 十六进制表示法 | 二进制表示法 | 备注 |
|---|---|---|---|
| 1 | 0x01 | 0000 0001 | |
| 2 | 0x02 | 0000 0010 | |
| 4 | 0x04 | 0000 0100 | |
| 8 | 0x08 | 0000 1000 | |
| 16 | 0x10 | 0001 0000 | |
| 32 | 0x20 | 0010 0000 | |
| 64 | 0x40 | 0100 0000 | |
| 128 | 0x80 | 1000 0000 |
- 仔细观察二进制表示法中,值1的位置。从表格第一行的十进制数字1开始,到表格最后一行的十进制数字128结束,二进制数中的值1,从最右边逐位移动到了最左边。
这也就是为什么跑马灯程序中,main方法里的初始值要设置成0x01了,因为这表示第一片QA引脚接入的第一排红色LED先点亮
- 两片74HC595D串联以后,16位的二进制数与74HC595D管脚的对应位置关系
对应了关系,也就表明一个二进制数可以精确到单独控制74HC595D的每一个并行输出引脚,是否输出数据。即可以精确地控制16排LED发光二极管,每一排的亮灭
| 二进制位数位置 | 二进制数位置列举 | 对应74HC595D片 | 对应管脚符号 /管脚序号 | 备注 |
|---|---|---|---|---|
| 第16位 | 0000 0000 0000 0001 | 第一片 | QA / 15 | 即当给SI引脚输入0000 0000 0000 0001二进制数据后,红色LED阵列的第一排LED会亮起,剩余15排LED都熄灭 |
| 第15位 | 0000 0000 0000 0010 | 第一片 | QB / 1 | 即当给SI引脚输入0000 0000 0000 0010二进制数据后,红色LED阵列的第二排LED会亮起,剩余15排LED都熄灭 |
| 第14位 | 0000 0000 0000 0100 | 第一片 | QC / 2 | 以此类推 |
| 第13位 | 0000 0000 0000 1000 | 第一片 | QD / 3 | 以此类推 |
| 第12位 | 0000 0000 0001 0000 | 第一片 | QE / 4 | 以此类推 |
| 第11位 | 0000 0000 0010 0000 | 第一片 | QF / 5 | 以此类推 |
| 第10位 | 0000 0000 0100 0000 | 第一片 | QG / 6 | 以此类推 |
| 第9位 | 0000 0000 1000 0000 | 第一片 | QH / 7 | 以此类推 |
| 第8位 | 0000 0001 0000 0000 | 第二片 | QA / 16 | 以此类推 |
| 第7位 | 0000 0010 0000 0000 | 第二片 | QB / 1 | 以此类推 |
| 第6位 | 0000 0100 0000 0000 | 第二片 | QC / 2 | 以此类推 |
| 第5位 | 0000 1000 0000 0000 | 第二片 | QD / 3 | 以此类推 |
| 第4位 | 0001 0000 0000 0000 | 第二片 | QE / 4 | 以此类推 |
| 第3位 | 0010 0000 0000 0000 | 第二片 | QF / 5 | 以此类推 |
| 第2位 | 0100 0000 0000 0000 | 第二片 | QG / 6 | 以此类推 |
| 第1位 | 1000 0000 0000 0000 | 第二片 | QH / 7 | 以此类推 |
- 适用于频率为11.0529MHz,精确延时的C语言方法:
void delay(unsigned int n) {
int i, j;
for (i = n; i \> 0; i—)
for (j = 110; j \> 0; j—);
}
- 1
- 2
- 3
- 4
- 5
程序分析
完整程序中已包含详尽注释,不再赘述。
重在理解以下几点:
- 为什么通过数据的移位操作就能控制74HC595D每个并行输出引脚的数据输出
- main()方法中,每次while循环结束前为什么要循环左移,不循环左移行吗?
- send_data()方法每一步的执行逻辑是什么样的,执行到每一步之后,输入到SI引脚的二进制数据分别是什么?
根据注释一步步分析下来以后,就能很清楚的知道程序是如何精确控制每一个并行输出引脚的了。


评论(0)
您还未登录,请登录后发表或查看评论