

机械臂基本介绍
1 运动轴
2 坐标系
3 UR5介绍
参考
1 运动轴
6轴机械臂,3个主轴(基本轴)用以保证末端执行器达到工作空间的任意位置,3个次轴(腕部轴)用以返回实现末端执行器的任意空间姿态。
2 坐标系
大部分商用工业机器人系统中,均可使用关节坐标系、直角坐标系、工具坐标系和用户坐标系, 而工具坐标系和用户坐标系同属于直角坐标系范畴 。
TCP 为机器人系统控制点,出厂是默认位于最后一个运动轴或安装法兰的返回中心,安装工具后 TCP 点将发生改变。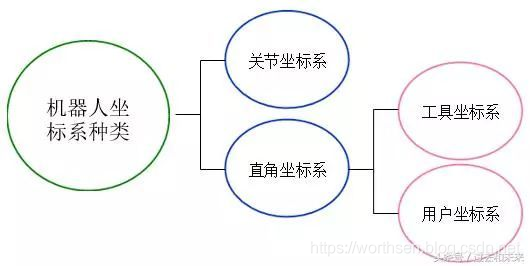
用户坐标系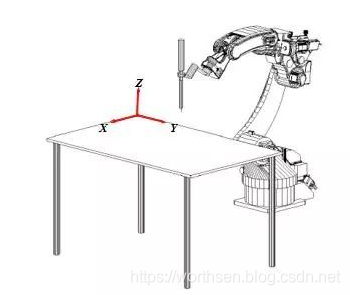
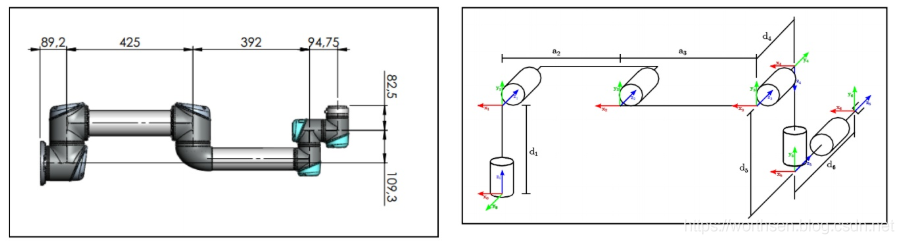
3 UR5介绍
参考
1、UR机器人之一:坐标系及位姿表示方法
2、UR机械臂运动学正逆解方法
3、关于人机协作机器人UR的介绍
4、机械手臂-坐标系
5、旋转矢量-矩阵-欧拉角-四元数换算验证


评论(0)
您还未登录,请登录后发表或查看评论