

机器人速度模式下的外环力控制与其他力控方法实现框架
在机器人速度模式下的外环力矩控制中,通常使用速度环和力矩环两个控制环路来实现。速度环控制机器人的关节速度,而力矩环控制机器人输出的力矩。
以下是实现速度模式下的外环力矩控制的一般步骤:
-
设定期望速度:根据任务需求或控制要求,设定期望的关节速度。
-
速度控制器设计:设计一个速度控制器,该控制器接收期望速度和实际速度之间的误差作为输入,并产生相应的控制信号。常用的速度控制器包括比例-积分(PI)控制器或者更复杂的控制器结构。
-
控制信号转换:将速度控制器输出的控制信号转换为电机驱动器能够理解的形式。这通常涉及到信号放大、滤波和适配等步骤。
-
控制信号输入电机驱动器:将转换后的控制信号输入到电机驱动器中,以驱动电机并控制关节速度。
-
力矩测量与反馈:使用力矩传感器来测量机器人输出的力矩,并将实际力矩信息反馈给控制系统。
-
力矩控制器设计:设计一个力矩控制器,该控制器接收期望力矩和实际力矩之间的误差作为输入,并产生相应的控制信号。
-
控制信号转换:将力矩控制器输出的控制信号转换为电机驱动器能够理解的形式。
-
控制信号输入电机驱动器:将转换后的控制信号输入到电机驱动器中,以调节机器人输出的力矩。
通过以上步骤,实现了速度模式下的外环力矩控制。速度控制器控制关节速度,力矩控制器控制输出力矩,两者结合实现了期望的力矩控制。

一些文章中的控制框图值得借鉴,其中实现方法如下:
可参考:
Force Control Improvement in Collaborative Robots through Theory Analysis and Experimental Endorsement
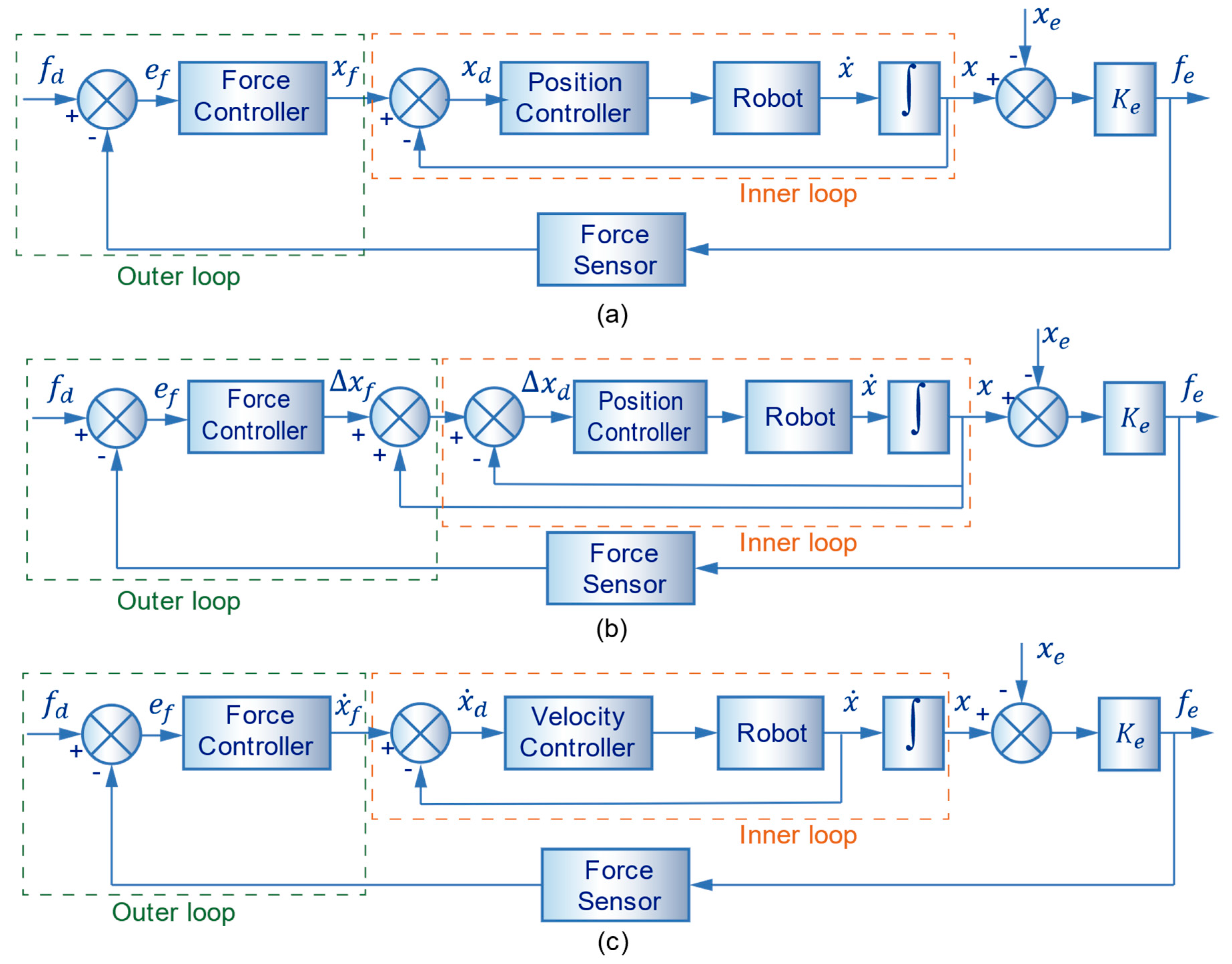
参考链接:https://www.mdpi.com/2076-3417/10/12/4329
Physical Interaction and Control of Robotic Systems Using Hardware-in-the-Loop Simulation:
以及,Examples: hybrid control and impedance control,
Hybrid position-force control
参考文献链接如下:http://www.osrobotics.org/osr/control/examples.html
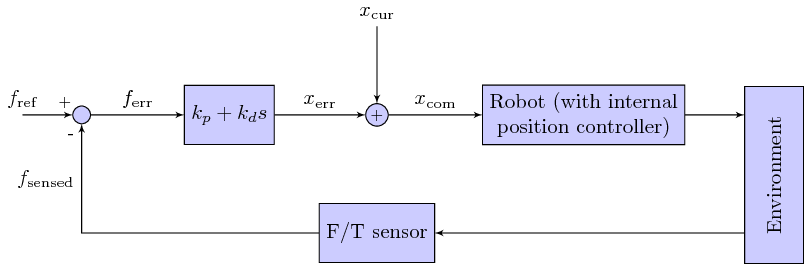
阻抗/导纳控制是一种间接力控制,不是直接控制反馈力,而是通过权衡力与运动的关系,包含阻抗控制的实现控制框图如下:
参考文献名: Efficient Force Control Learning System for Industrial Robots Based on Variable Impedance Control
当然,有的文献中很简明的表示了力控制的本质:
参考文献: Explicit force control V.S. impedance control for micromanipulation.
力控制的关键问题是如何准确地控制机器人的力或力矩输出,以满足特定的任务需求。以下是一些与力控制相关的关键问题:
-
力/力矩传感器选择和校准:选择合适的传感器来测量机器人的力或力矩输出,并进行校准以确保准确性和可靠性。
-
力传递与力传感器的刚度匹配:确保机器人的结构和连接部件具有足够的刚度,以使力传递到传感器上的失真最小化。
-
控制器设计与参数调整:设计合适的力控制器结构,并通过适当的参数调整来实现稳定、精确的力控制。
-
环境力/阻力的补偿:考虑到环境对机器人施加的额外力或阻力,需要相应的补偿策略来抵消这些干扰。
-
力/力矩的限制与保护:设置适当的力/力矩限制以保护机器人和周围环境,防止超出安全范围。
-
力控制与速度/位置控制的协调:力控制往往与速度或位置控制相结合,需要有效地协调这些控制模式,以实现稳定和精确的控制。
-
建模与力反馈:准确地建立机器人系统的力学模型,并利用实时的力反馈信息来改善控制性能。
传统的机器人力矩控制方法存在一些弊端,包括:
-
动力学模型误差:传统的力矩控制方法通常依赖于机器人的动力学模型,但实际机器人系统的动力学特性可能与模型存在一定的误差。这些误差可能来自于建模过程中的简化假设、不确定性因素或系统参数的变化。
-
传感器噪声和不准确性:力矩传感器的测量结果可能受到噪声和不准确性的影响,这可能导致控制系统对力矩的测量误差敏感,进而影响控制性能。
-
高带宽要求:力矩控制需要实时地对力矩进行测量和控制,因此对系统的带宽要求较高。高带宽要求可能导致系统的响应速度受限,对控制器和传感器的性能提出更高的要求。
-
不确定性抑制能力有限:传统的力矩控制方法在面对外部环境的不确定性或扰动时,抑制能力有限。例如,对于非刚性环境的力控制,由于环境的柔软性和不确定性,传统方法可能无法精确控制期望的力矩。
-
难以处理非线性特性:某些机器人系统具有非线性特性,如摩擦、非线性刚性等。传统的力矩控制方法可能无法准确建模和处理这些非线性特性,导致控制性能下降。
目前实现机器人力矩控制的前沿方法包括以下几种:
-
自适应控制:自适应控制方法通过实时调整控制器参数来适应系统动态特性和不确定性。自适应控制可以提高力矩控制系统的鲁棒性和性能,使其能够应对系统参数变化、外部扰动和不确定性等问题。
-
模糊控制:模糊控制利用模糊逻辑来处理非线性和模糊性问题,在力矩控制中可以应用于建模、控制器设计和系统优化。模糊控制方法可以通过模糊推理和模糊规则来实现对力矩的精确控制。
-
鲁棒控制:鲁棒控制方法旨在处理系统参数不确定性、外部扰动和测量噪声等问题,以保持控制系统的稳定性和性能。鲁棒控制方法通过设计具有鲁棒性的控制器来应对系统不确定性,并能够在不同工作环境下保持稳定的力矩控制。
-
优化控制:优化控制方法利用优化算法来寻找最优控制策略,以实现力矩控制的最佳性能。优化控制方法可以考虑系统动力学、约束条件和性能指标等因素,并通过优化算法来求解最优控制问题。
-
非线性控制:非线性控制方法考虑机器人系统的非线性特性,并设计相应的控制策略来实现精确的力矩控制。非线性控制方法包括基于反馈线性化的方法、滑模控制和反馈线性化等技术,能够处理系统的非线性动态特性和不确定性。
这些前沿的机器人力矩控制方法在提高控制精度、鲁棒性、适应性和性能方面取得了显著的进展,并在各种应用领域中得到了广泛的研究和应用。
参考文献:
【1】https://www.researchgate.net/figure/FORCE-CONTROL-BLOCK-DIAGRAM-FOR-LEAD-THROUGH-TEACHING_fig1_314634124
【2】https://blog.csdn.net/qq_33243298/article/details/125945784
【3】https://www.163.com/dy/article/I8GFOPN70552CQHM.html


评论(0)
您还未登录,请登录后发表或查看评论