

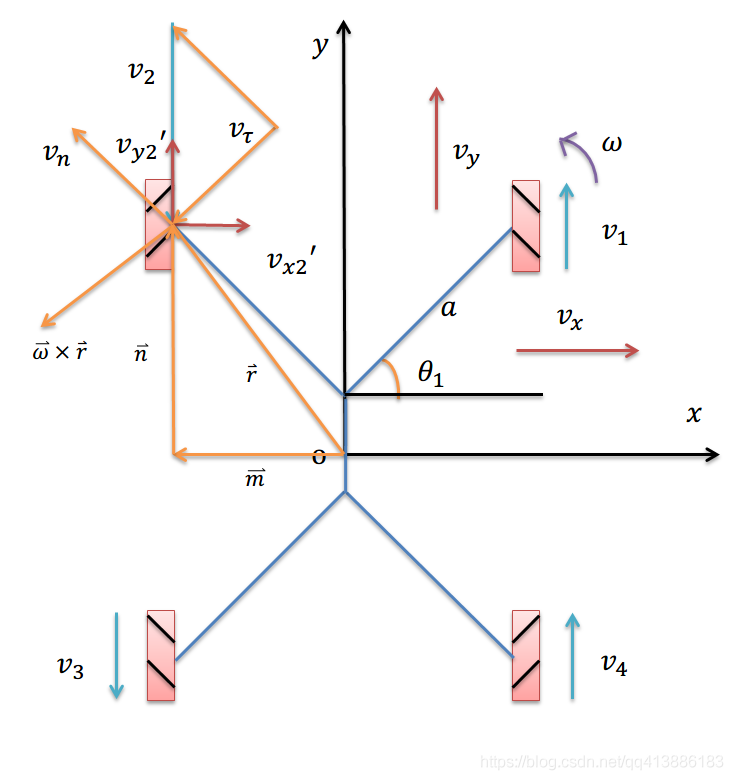
1.构建数学模型

即

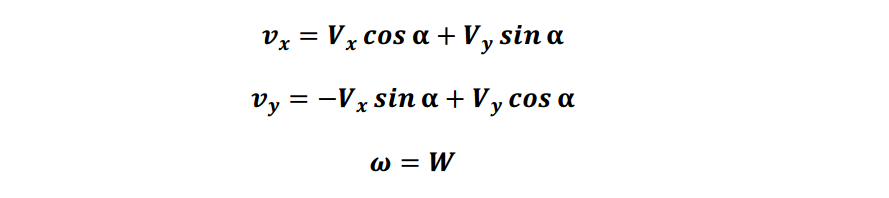
以上即为世界坐标系到本体坐标系的速度映射矩阵, 该矩阵与底盘的轮系没有关系。
3.麦轮速度解算
由于此处旋转中心与轮轴的连线不垂直于棍子,所以使用向量外积对角速度进行处理。
由物理关系

和几何关系

可得

根据上图,将角速度投影到本体坐标轴上,与两轴向速度融合。 可以得到:




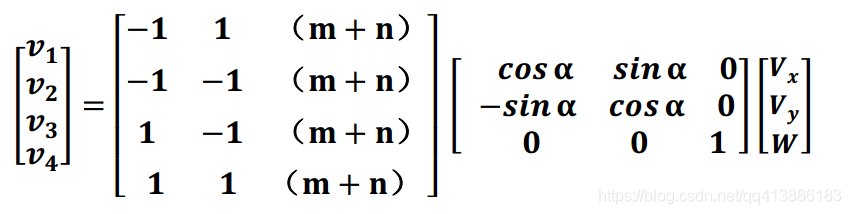
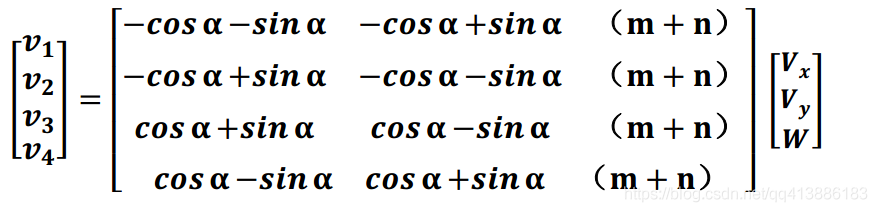
以上即为麦克纳姆轮四轮长方形底盘速度解算。
即
以上即为世界坐标系到本体坐标系的速度映射矩阵, 该矩阵与底盘的轮系没有关系。
由于此处旋转中心与轮轴的连线不垂直于棍子,所以使用向量外积对角速度进行处理。
由物理关系
和几何关系
可得
根据上图,将角速度投影到本体坐标轴上,与两轴向速度融合。 可以得到:
以上即为麦克纳姆轮四轮长方形底盘速度解算。


您当前积分:0

评论(0)
您还未登录,请登录后发表或查看评论