
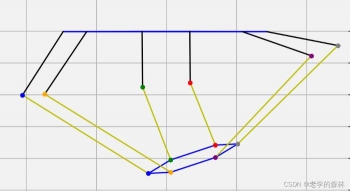
到年底了,终于有时间来进行我的并联机器人项目,目前在电脑端把位置算法解决了,这是用python写的一个模拟程序。示意图如下
这是初始位置: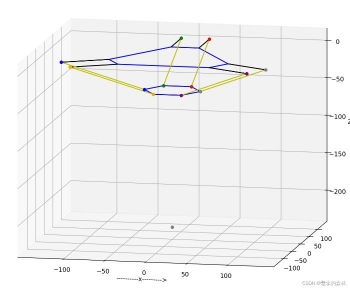
以三轴方式运行,即只有XYZ的坐标,而没有围绕XYZ的旋转(姿态控制)时,上平台和下平台是平行的,每2个一组的主动臂也是平行的,其末端是在同一高度,如下: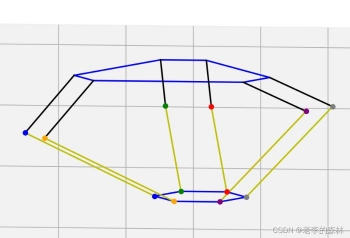
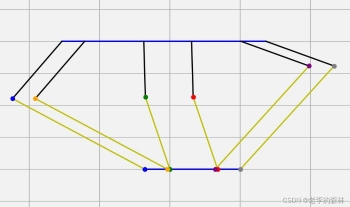
当加入姿态控制即下平台绕xyz轴均可旋转一定角度时,每2个一组的主动臂的运行不再平行,其末端(也就是主动臂的偏转角)显然不在同一高度,上下平台也不再平行,如下: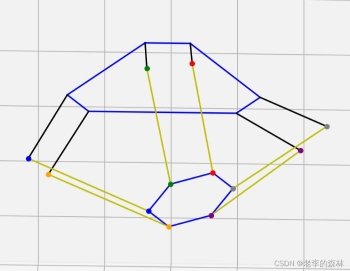
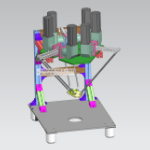
机械部分,UG画的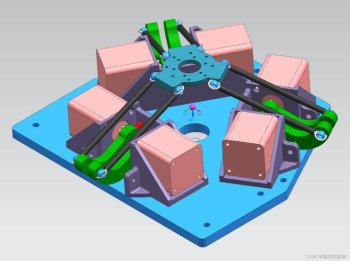
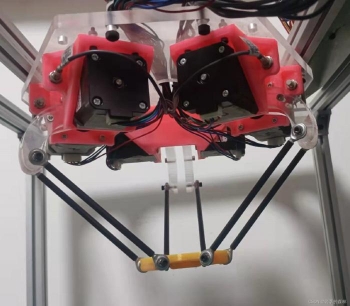
实物,部分结构件用我自己做的3D打印机打印完成
电路板,用的是STM32单片机,今年这玩意涨价厉害,还好是在涨价之前屯了点备用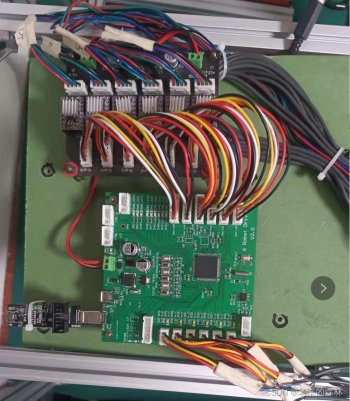
来个全景图, 左边是本项目的6轴并联机器人,右边是我自制的3D打印机



评论(0)
您还未登录,请登录后发表或查看评论