

常用的姿态表示方法有欧拉角、方向余弦矩阵、四元数这几种
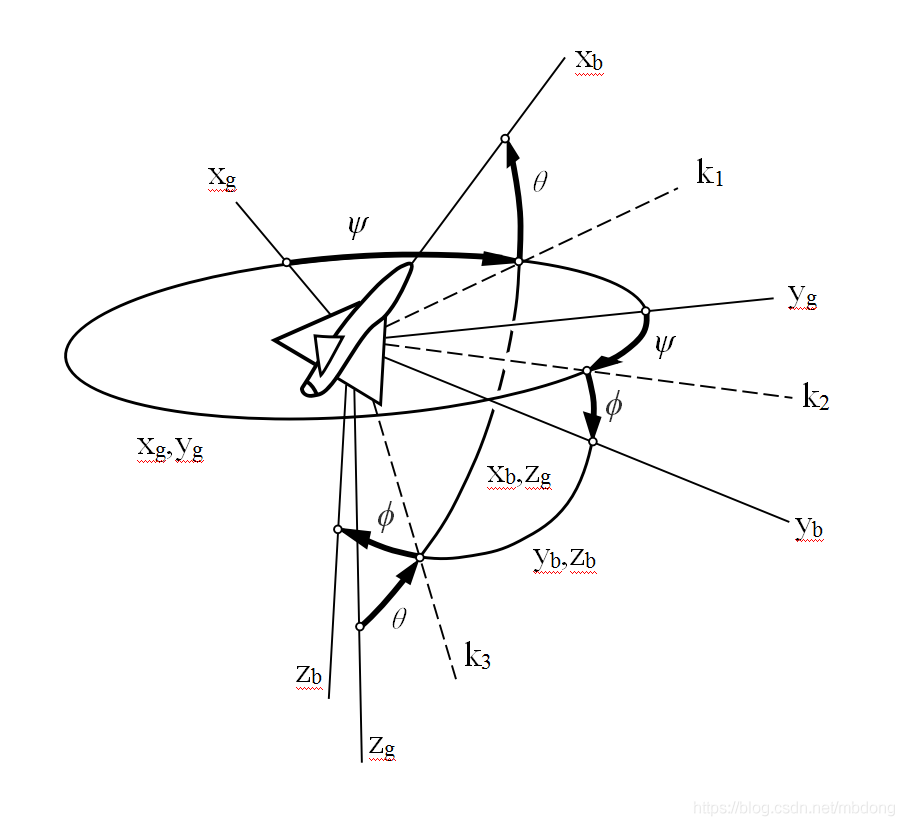
欧拉角表示方法采用来表示飞行器的姿态,其中
为滚转角,
为俯仰角和
为航向角,表示飞行器首先航向偏转角度,再俯仰角度
,然后机体滚转角度
得到的姿态
方向余弦矩阵通过机体坐标和地面坐标的转换矩阵(DCM, Directional Cosine Matrix)来表示机体的姿态
四元数通过四个元数来表示飞行器全方位的姿态,它的特点是表征方式简洁,并且没有奇异点
欧拉角->方向余弦矩阵
其中,表示从机体坐标转换到地面坐标的变换矩阵,
为地面坐标到机体坐标的转换矩阵,为
的转置
欧拉角->四元数
方向余弦矩阵->欧拉角
通过前面的欧拉角到方向余弦矩阵的变换公式,可以逆变换得到从发现余弦矩阵到欧拉角的变换,方便起见记,则
其中,表示方向余弦矩阵的第i行第j列元素
四元数->方向余弦矩阵
方向余弦矩阵->四元数
根据四元数定义
由四元数和方向余弦矩阵转换矩阵可得
有
四元数->欧拉角
利用上面的方向余弦矩阵与欧拉角和四元数的转换关系得到
其中
欧拉角、四元数、方向余弦矩阵、姿态表示方法的特点
姿态表示方法里面,欧拉角是比较直观的方法,用三个角度来衡量机体坐标和地面坐标之间的姿态倾转,在小角度时,基本上姿态角就等于倾角,但是它的缺点是非线性特点,在俯仰角接近90度的时候,欧拉角变量会呈现较大的非线性,在90度具有奇异点,不利于计算,它的特点是意义直观,所以欧拉角通常用于向用户表示姿态,而在内部计算和程序实现中,则通常采用四元数或方向余弦矩阵方法。
四元数和方向余弦矩阵的表示方法,都没有奇异点的问题,能够性能一致的表示360度全方位的姿态,在计算过程中,直接对四元数或者方向余弦矩阵数值进行迭代,相比之下四元数的表示更加简洁,计算量更小,而方向余弦矩阵则多一些冗余度和计算值,但是在无人机涉及的坐标转换计算方面更加便利直接,两者都有应用。
参考




评论(0)
您还未登录,请登录后发表或查看评论