

首先要弄清相机坐标的转换关系。
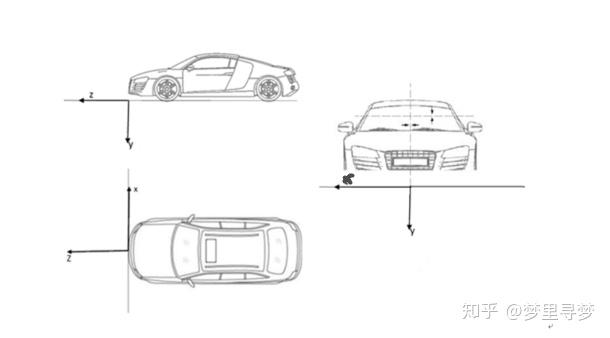
一、世界坐标系(world coordinate),也称为测量坐标系,是一个三维直角坐标系,以其为基准可以描述相机和待测物体的空间位置。世界坐标系的位置可以根据实际情况自由确定。
坐标原点为车头中心点位置,X轴水平向右,Y轴指向地面,Z轴与光轴方向平行。坐标系中的点,用 表示。
相机坐标系{camera}:坐标原点为相机的光心位置,X 轴和Y 轴分别平行于图像坐标系的X轴和 Y 轴,Z 轴为相机的光轴。相机坐标系中的点,用表示。
图像物理坐标系: 坐标原点为CCD 图像平面的中心,X轴和Y 轴分别平行于图像平面的两条垂直边。图像物理坐标系中的点,用表示。图像物理坐标系是用物理单位(例如毫米)表示像素在图像中的位置。
图像像素坐标系{image}:坐标原点为图像平面的左上角顶点,X 轴和Y 轴分别平行于图像物理坐标系的 X 轴和Y 轴。图像像素坐标系中的点,用表示。像素坐标系就是以像素为单位的图像坐标系。
Ground坐标系 : 在世界坐标系中, 的平面。
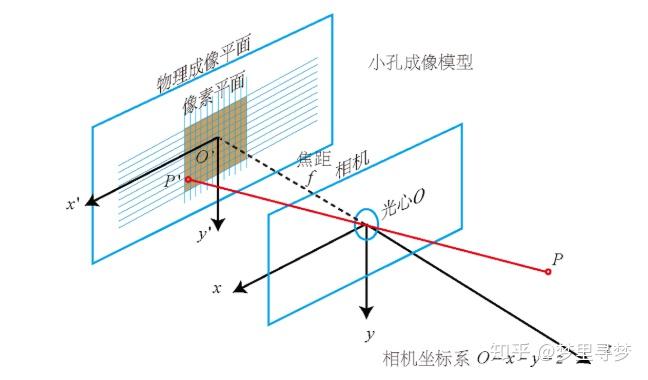
接下去要先了解一下针孔相机模型。
相机将三维世界中的坐标点映射到二维图像平面的过程能够用一个几何模型进行描述。这个模型有很多种,其中最简单的称为针孔模型。
在现实生活中,针孔相机是由前方有 一个小洞(针孔)所构成。现实世界中源于某个物体的光线穿过此洞,会在摄像机的底板或图像平面上形成一幅倒立的图像。
其中P为相机坐标系下的点。
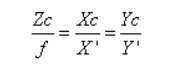
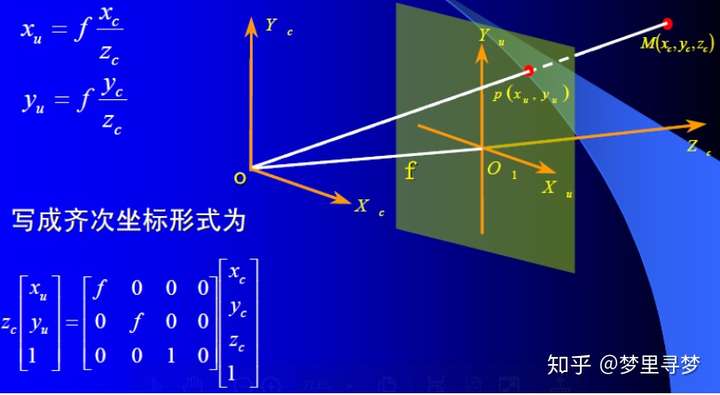
摄像机坐标系到图像物理坐标系:相似三角形(如图2所示)。其关系可表示为:
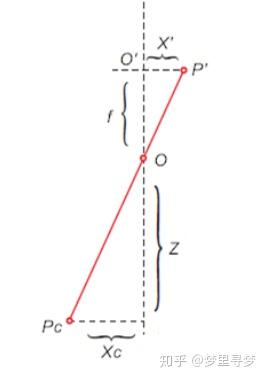
也就是有如下关系:
现在可以来看看他们是怎么转换的了。
1、世界坐标系=> 相机坐标系,可以理解为相机放的位置跟世界坐标原点位置不同,而且相机还会有角度上的偏差(pitch,yaw,roll)。
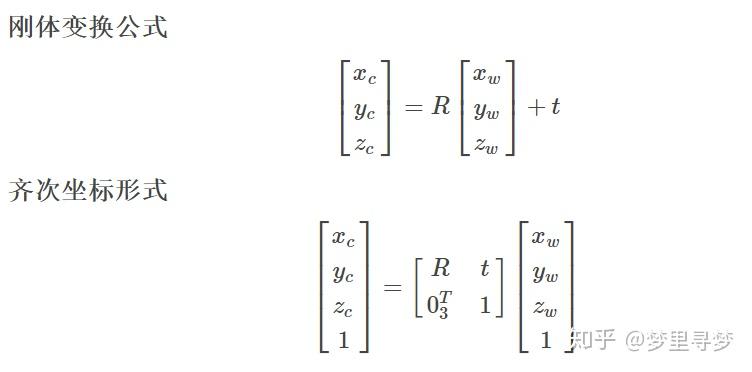
其中R为正交旋转矩阵,输入pitch, yaw, roll可得:

t为相机相对于世界坐标的平移向量,即相机光心在世界坐标系中的位置为 .
2、 相机坐标系 => 图像物理坐标系,就是直接运用针孔成像原理
3、图像物理坐标系 => 图像像素坐标系
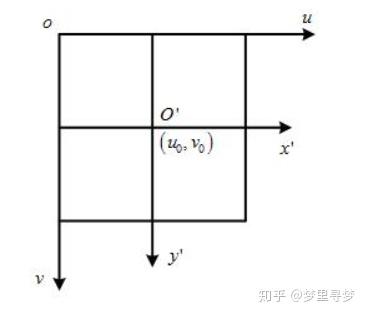
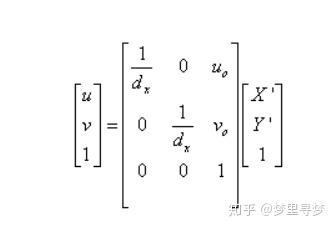
O'为图像物理坐标系,则有如下关系

变形为
4、相机坐标系 => 图像像素坐标系
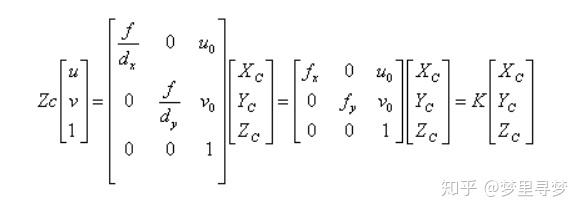
其中K为相机的内参矩阵,可通棋盘格标定获取。
5、世界坐标系 => 图像像素坐标系

到此对相机转换有了比较清晰的了解了,后续有时间再补上相机标定有关内容。



评论(0)
您还未登录,请登录后发表或查看评论