

前言
在进行机器人进行slam的时候往往单一的传感器不能实现强鲁棒性,很多时候需要用到多个传感器的融合,例如激光雷达+相机+IMU+GPS+轮速计+毫米波雷达等等。
在进行多传感器融合的时候就涉及到了数据帧的对应,如果需要用时间戳去对应的话,那么则需要进行时间同步。由于数据的传输接收等存在不同程度的延时,数据的产生频率也不相同,如果仅用软同步的话,那么必然会存在一定偏差,导致数据对准不精确,那么就体现了硬件时间同步的重要性。
本篇主要介绍在3D激光SLAM中,如何对Livox激光雷达进行时间硬件同步。
Livox设备支持3种时间同步方式:
- PTP:IEEE 1588v2.0 PTP 网络协议同步;
- GPS:秒脉冲+GPRMC时间数据,组成GPS时间同步方式;
- PPS:秒脉冲同步,需要上层应用程序通过其他途径(如:uart)获取每个脉冲的时间信息,并修正点云时间。
同步原理
PTP时间同步原理
同步过程使用IEEE 1588v2.0 PTP的Delay request-response机制(two steps),Livox设备作为slave端,和master时钟设备进行ptp时间同步。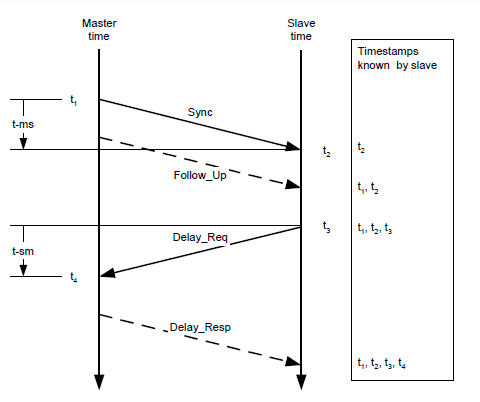
master和slave时钟通过Sync、Follow_Up、Delay_Req、Delay_Resp这几个数据包的交互,得到t1、t2、t3、t4时间,通过如下计算得到传输路径延迟和两时钟的偏移:
传输路径延时:
时间偏移:
GPS时间同步原理
GPS时钟源的PPS端口每秒发送一次硬件脉冲(PPS信号),随后数据端口发送一次对应这个脉冲上升沿的时间信息(GPRMC格式)。
Livox设备接收到PPS信号上升沿,并由GPRMC数据解析出正确的时间信息后,会设置点云时间为GPS时间,并保持此时间基准持续累加,来实现和GPS设备的时间同步。
注意:
Livox Hub可以直接接收RS485电平的GPRMC信号;
Livox LiDAR无法直接接收GPRMC信号,需要将GPRMC数据端口接入PC,然后通过sdk协议发送给雷达
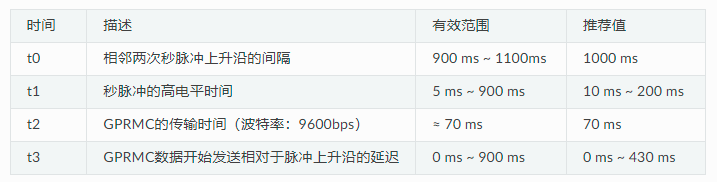
PPS信号和GPRMC信号的时序要求: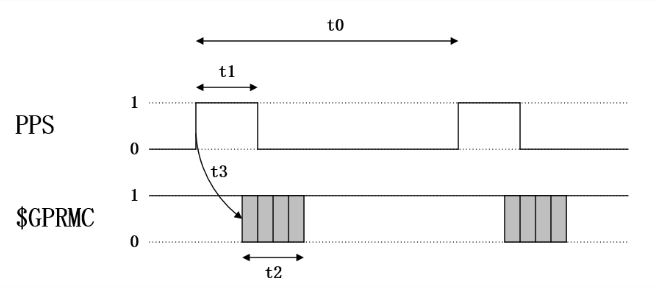
PPS时间同步原理
Livox LiDAR每次接收到PPS信号的上升沿后,会将当前时刻的点云时间置为0,然后重新开始计时直到下一个PPS脉冲到来。我们可以利用这个特性,来实现PPS脉冲对LiDAR时间的同步。
GPS+PPS时间同步使用方法
为了兼容其他厂商的LiDAR硬件,Livox设备也支持GPS时间同步。
由于Livox有不同种类的硬件(LiDAR/Hub),在使用GPS同步时,可以将硬件接口分为3类:
- 使用Livox Hub;
- 使用Livox Converter 1.0连接的LiDAR(如:Mid-40、Mid-100);
- 使用Livox Converter 2.0连接的LiDAR(如:Tele-15、Horizon、Avia);
下面将分别介绍如何使用这3种接口进行GPS时间同步。
Livox Hub
如果GPS模块的时间信号和PPS信号是RS485电平,直接将线接入Hub的GPS时间同步口(GPS sync port)即可。
如果GPS模块的时间信号和PPS信号是TTL电平,则需要进行如下的电平转换后,才能将信号接入Hub的GPS时间同步口(GPS sync port)。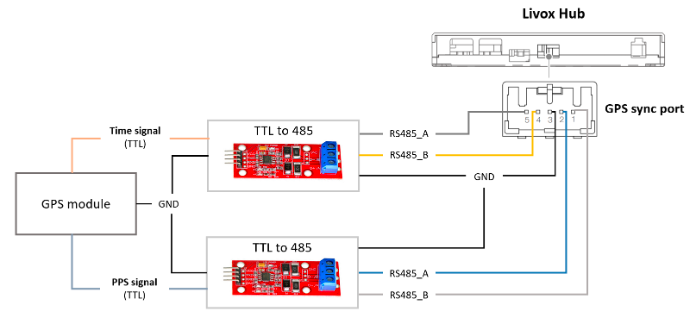
Hub使用GPS同步时,不需要进行SDK软件的配置。
Livox Converter 1.0
将GPS模块的时间信号(GPRMC)通过TTL转usb模块接入PC,PPS(必须是RS485电平)信号接入LiDAR转接盒同步口(Sync Port)。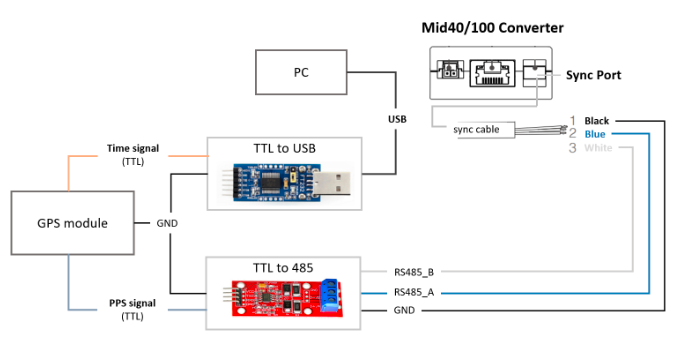
查看接入PC的usb模块的端口名称,
例如 /dev/ttyUSB0,
添加到 livox_lidar_config.json 文件中“timesync_config”的“device_name”,
然后将“enable_timesync”配置为 true,
波特率“baudrate_index”可以参考 Livox_ros_driver 来配置具体数值
"timesync_config": {
"enable_timesync": true,
"device_name": "/dev/ttyUSB0",
"comm_device_type": 0,
"baudrate_index": 2,
"parity_index": 0
}
然后 运行launch file
Livox Converter 2.0
将GPS模块的时间信号(GPRMC)通过TTL转usb模块接入PC,PPS(注意这里是TTL电平)信号接入LiDAR转接盒同步口(Sync Port)。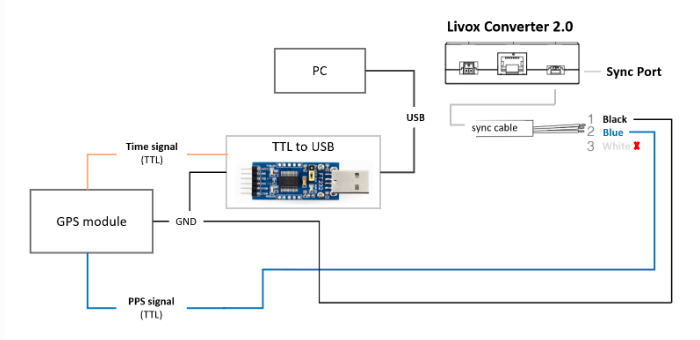
查看接入PC的usb模块的端口名称,
例如 /dev/ttyUSB0,
添加到 livox_lidar_config.json 文件中“timesync_config”的“device_name”,
然后将“enable_timesync”配置为 true,
波特率“baudrate_index”可以参考 Livox_ros_driver 来配置具体数值
"timesync_config": {
"enable_timesync": true,
"device_name": "/dev/ttyUSB0",
"comm_device_type": 0,
"baudrate_index": 2,
"parity_index": 0
}
然后 运行launch file
状态检查
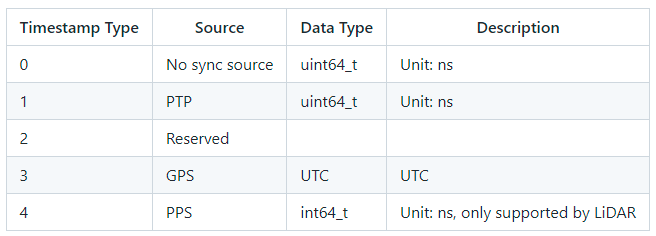
通过查看点云数据包头中的timestamp_type数据,
如果timestamp_type为3,则说明设备正在进行GPS时间同步: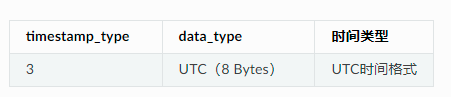
UTC时间格式:
PPS时间同步使用方法
Livox LiDAR每次接收到PPS信号的上升沿后,会将当前时刻的点云时间置为0,然后重新开始计时直到下一个PPS脉冲到来。我们可以利用这个特性,来实现PPS脉冲对LiDAR时间的同步。
下面是实现这个流程的伪代码:
// PPS Time Synchronization
static uint64_t lidar_time_last;
static uint64_t lidar_time_real;
// 1. Read the PPS rising edge time, Unit is nanosecond.
uint64_t pps_time_ns = get_pps_rising_nsecond();
// 2. Read LiDAR point time, Unit is nanosecond.
uint64_t lidar_time = get_lidar_pack_time();
// 3. Update real time.
if (lidar_time < lidar_time_last)
{
//LiDAR time jump indicates the generation of PPS rising edge.
lidar_time_real = pps_time_ns + lidar_time%(1000000000);
}
else
{
lidar_time_real += lidar_time - lidar_time_last;
}
//Update history
lidar_time_last = lidar_time;
通过其他方式获得PPS上升沿的时间信息,对应上述代码中的get_pps_rising_nsecond()接口。



评论(0)
您还未登录,请登录后发表或查看评论