
人工势场法,是由Khatib公司所提供的一种进行机器人体育运动计划的虚拟能力方式。其思路是把目标和障碍物对机器人运动的负面影响,再细化成人造势场。目标处势能低,而阻挡物处势能高。这样,势差就形成了目标对自身的万有引力和阻挡物对自身的斥力,其共同合力也就直接影响了自己沿着势场的负阶梯方向,沿着目标点移动。人工势场法计算简单,所获得的目标路径也安全而平稳,但复杂多变的势场环境条件却可以在目标点以外形成局部极小点,使得自动化工程机器人永远没法抵达总体目标。目前为了解决人工势场法的局部极小点现象,科学家们已提出了许多改良办法。大致包括两种方式:一类是通过设置相应的位势参数,来减小或避免局部极小点的形成;而另一个办法则是在工业机器人中产生了局部极小点之后,再通过另外的方法使工业机器人远离了局部极小点。
前者一般要求全局地图信息,而且取决于周围障碍物的外形大小,在环境较复杂时无法使用。后者则多采用搜索法、多势场法和沿墙行走法等方式,以使人工智能远离局部极小点。而搜索方法则采用了最佳选择、模拟退火、随即搜寻等方式,来找到比局部极小点势场值更低的位置,从而让新一代计算机继续移行。因为在未知世界中人类基本没有启发能力,所以搜索方法的准确性也就相对地非常低。多势场法可以得到几个与全局极小点相同,但又与局部极小点不同的位势值,当机器人在进入一个局部极小点时,规划机将改变势参数使其离开该点位。
不过,在不确定性的情况中类似的多势场很难建立,并且该方式也可以使得机器人在之后返回曾脱离的局部极小点。由于形成局部极小点时是由某些或几个阻挡物体的斥力势场与万有引力势场联合效应所形成,其间距与阻挡物体的间距也就必定不远,而绕墙走法也就是通过如此的距离机理,使机器人在形成局部极小点时可以依靠近似BUG算法的循环操作,超越了形成局部极小点的阻挡物体而继续前进。这个方式精确度非常高,并且不依靠周围环境的先验信息和障碍物形状。
基本人工势场法
作用在自动化机器上的假想引力和斥力都是势函数的负梯度,故人化工势函数应当具备如下特性:
非负且连续可微;
斥力势强度离障碍物越近,其力度也就越大;
引力势的强度距离目标区域越近,其强度就越小。
此处建立了以下的引力势参数和斥力势参数:
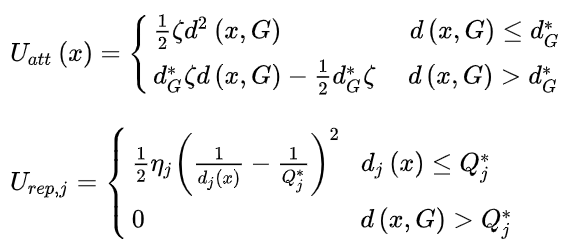
人工势场算法改进
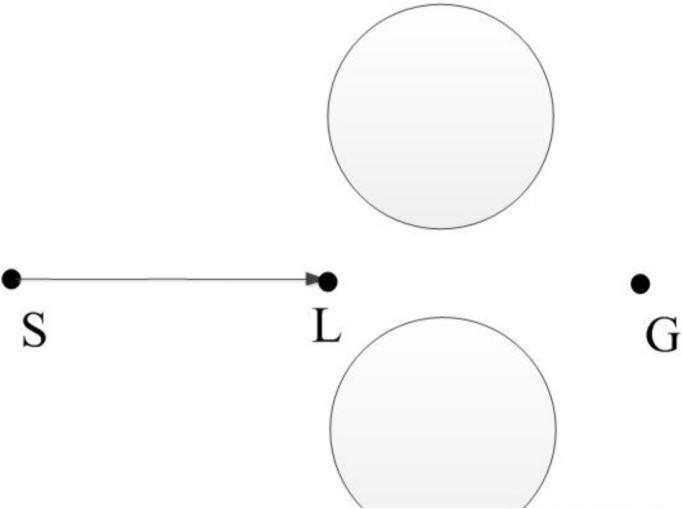
当机器人的工作场地中含有地形复杂性或相距较近的阻碍物时,就可以产生势场局部极小点,从而使得机器人在此处静止并在此周围振动。如图显示,当场上存在"陷阱"形状障碍物或与目标物体有特定位关系的阻碍物时,可以在人工势场周围形成局部极小点(图中L点),而当工业机器人移动至局部极小点周围时,势场的负梯度方位指向L点。则自动化人工智能将在L点周围静止,并在其周围摆动并做圆周运动。
为让机器人在局部极小点中成功逃脱,在人工势场法的基石上引进了应激行动,即增加绕行动作。当机器人碰到局部极小点时,可以忽视对目标引力势的影响,直接顺着斥力势的等势面方位移动位置,直至机器人完全脱离局部极小范围。经过改进的计算过程,包括:
通过传感器信息可以估算当前地点的万有引力与斥力;
判断是不是处于绕行行为,若是,则执行3;如果否,则将执行4;
确定能否避开局部的极小范围,若是,则机器人顺着合力方式移动,从而实现了绕行操作;如否,则机器人将沿斥力场均势线前行,并继续绕行地球的过程;
判定是不是产生了一个局部极小点,如果如是,那么机器人按照斥力场均势曲线运动,并开始产生绕行现象;如果否,那么机器人顺着合力方向移动;
判断是否到达目标,若是,退出算法;若否,继续1;
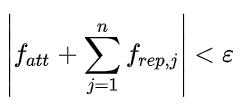
通过下面的判断条件可以确定机器人有没有遇到过局部极小点,如图所示。
为让机器人在局部极小点上成功逃脱,在人工势场法的基石上引进了应激行动,即增加绕行动作。当机器人碰到局部极小点时,忽视了引力势的影响,而是顺着斥力势的等势面方位运动,直至机器人完全脱离了部分极小区域。经过改进的计算过程,包括:
通过传感器信息可以估算当前地点的万有引力与斥力;
判断是不是处于绕行行为,如果是,则执行3;若否,则执行4;
判断能否避开局部的极小范围,如果能,则机器人顺着合力方向前进,并完成绕行动作;如果否,则机器人沿斥力场均势直线运动,是绕行行为;
判定是不是出现了局部极小点,如果是,则机器人沿斥力场等势曲线运动,展开绕行动作;如果否,则机器人顺着合力方式运行;
判断是否到达目标,若是,退出算法;若否,继续1;
通过下面的判断条件确定机器人有没有遇到过局部极小点。
条件1:
条件2:
当要求1和要求2同时存在时,人们就觉得机器人中存在了局部极小点。在要求一中ξ是一种极小的正数,其意思就是机器人所接受的虚拟合力近似零。这是目前最直观的局部极小点判断方式。在要求二中α是零,1期间的某一正数,条件xA为机器人在运动流程中的某一状况,要求sA代表机器人行经xA至当前地点x的总里程,而要求二成立表示机器人在跑了很长的里程后,位移速度极小。用于测量机器人在局部极小点附近所产生的摆动和圆周运动。




评论(0)
您还未登录,请登录后发表或查看评论