

这篇当做实验的笔记
之前用turtlebot3完成了SLAM建图及自主导航,这次是真车实践篇。
一、激光SLAM建图
登录的主机是小车端的工控机,已经植入ubuntu系统,从机是自己的电脑设备。启动launch文件要在主机远程控制端,也就是打开的第一个终端,启动rviz界面要在自己的客户端,也就是第二个终端。
1、 SSH登录小车端
2、打开第二个终端,PC端,这个终端不要登录SSH
ip a 查看自己电脑的IP地址
nano .bashrc 拉到最下面,设置环境变量,修改IP地址
export ROS_HOSTNAME=(自己电脑的IP)
export ROS_MASTER_URI=http://192.168.(小车IP):11311
ctrl + o 保存退出
修改完后source .bashrc
3、设置好环境变量之后,再在第一个终端打开launch文件mapping.launch
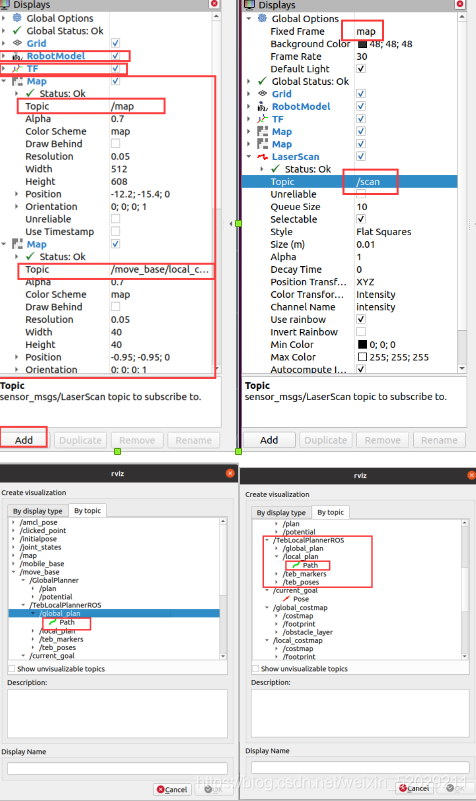
4、打开rviz,进行相关配置
5、打开新终端登录SSH,再打开键盘节点,根据输出提示对小车进行控制,尽可能扫出一圈完整封闭的地图。
6、保存地图。(按自己软件包名称来输入命令
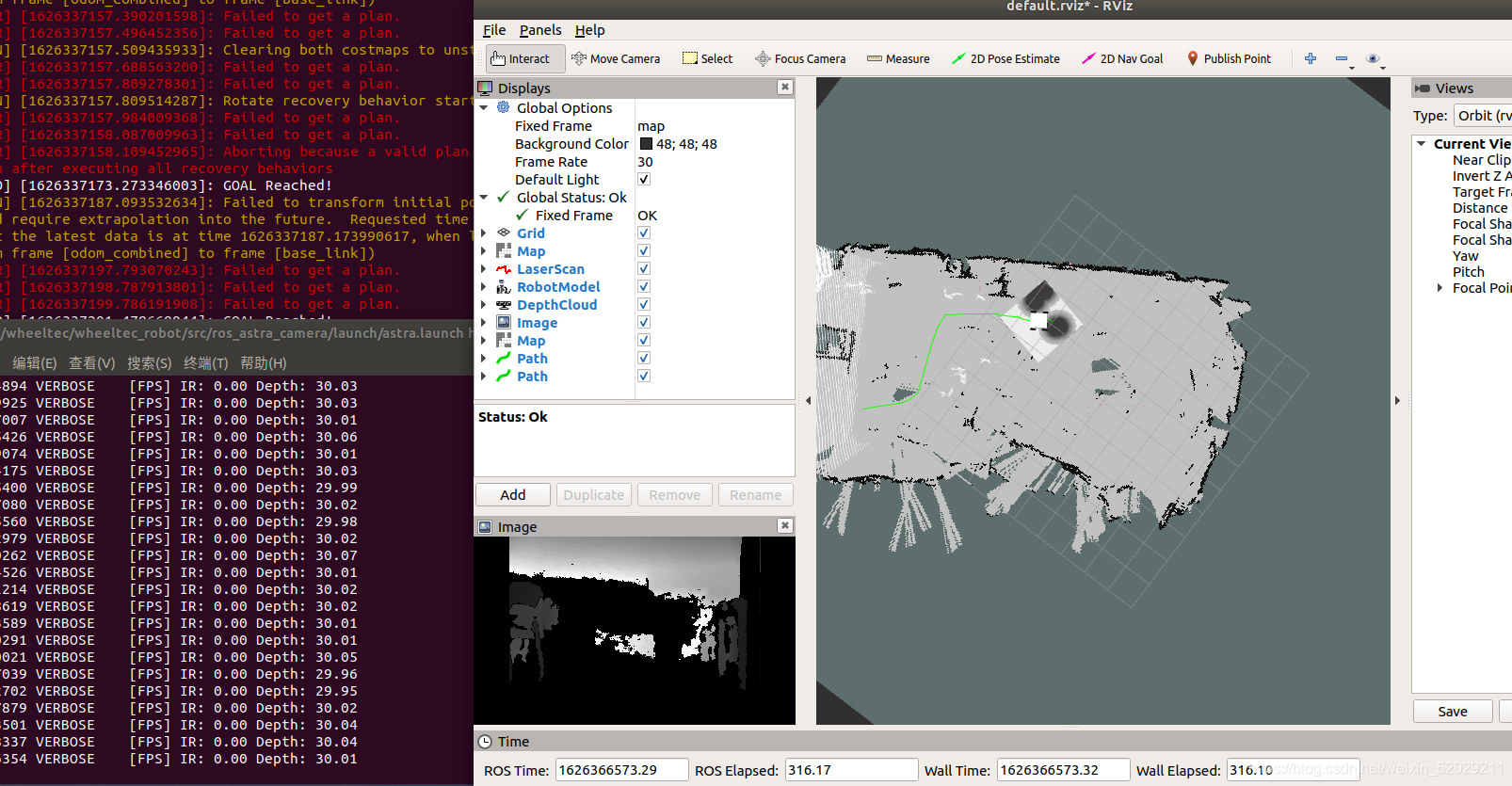
二、自主导航
1、SSH登录小车端
2、PC端设置环境变量,一般设置一次后就不用再设置,可以检查一遍
3、小车端打开launch文件navigation.launch (会打开已经保存好的地图并发布消息)
4、打开rviz,进行相关配置,
5、使用2D Pose Estimate调整小车起始位姿,使用2D Nav Goal设定小车目标点,小车就会按规划的路径实现自主导航。
如果小车不运动,那可能是IP地址设置的问题。
三、查看RGB和深度摄像头
1、roslaunch usb_cam usb_cam_test.launch
rviz添加image,添加相应话题
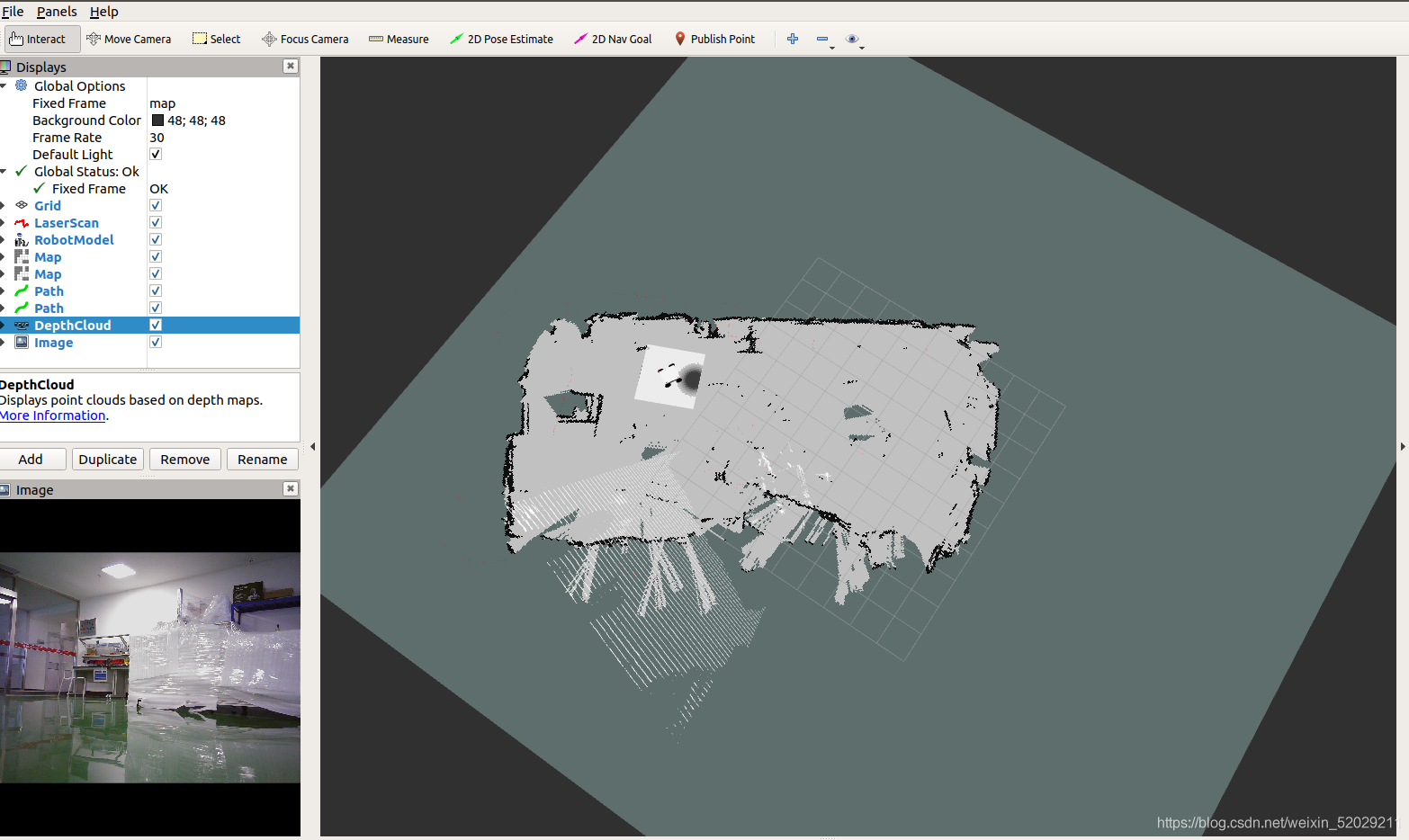
2、roslaunch astra_camera astra.launch
同样添加image,添加相应话题
之后更新视觉SLAM部分



评论(0)
您还未登录,请登录后发表或查看评论