
前言
由于是古月居的助教,有幸能够参与到旭日x3 派的试用活动当中,同时鉴于树梅派、Jetson Nano等AI开发板及芯片多数为外国厂商且价格逐渐水涨船高,也希望为国产AI开发板及国产芯片的贡献一点微不足道的力量。
开发环境
个人笔记本电脑为系统为ubuntu18.04(无windows),处理器为Intel i5 11代
开发参考
依次点击地平线官网->开发者社区->旭日x3派->置顶帖 地平线机器人开发平台(Hobot)版本发布,可以看到开发手册的文档,链接为:https://developer.horizon.ai/api/v1/fileData/documents_pi/index.html
材料准备
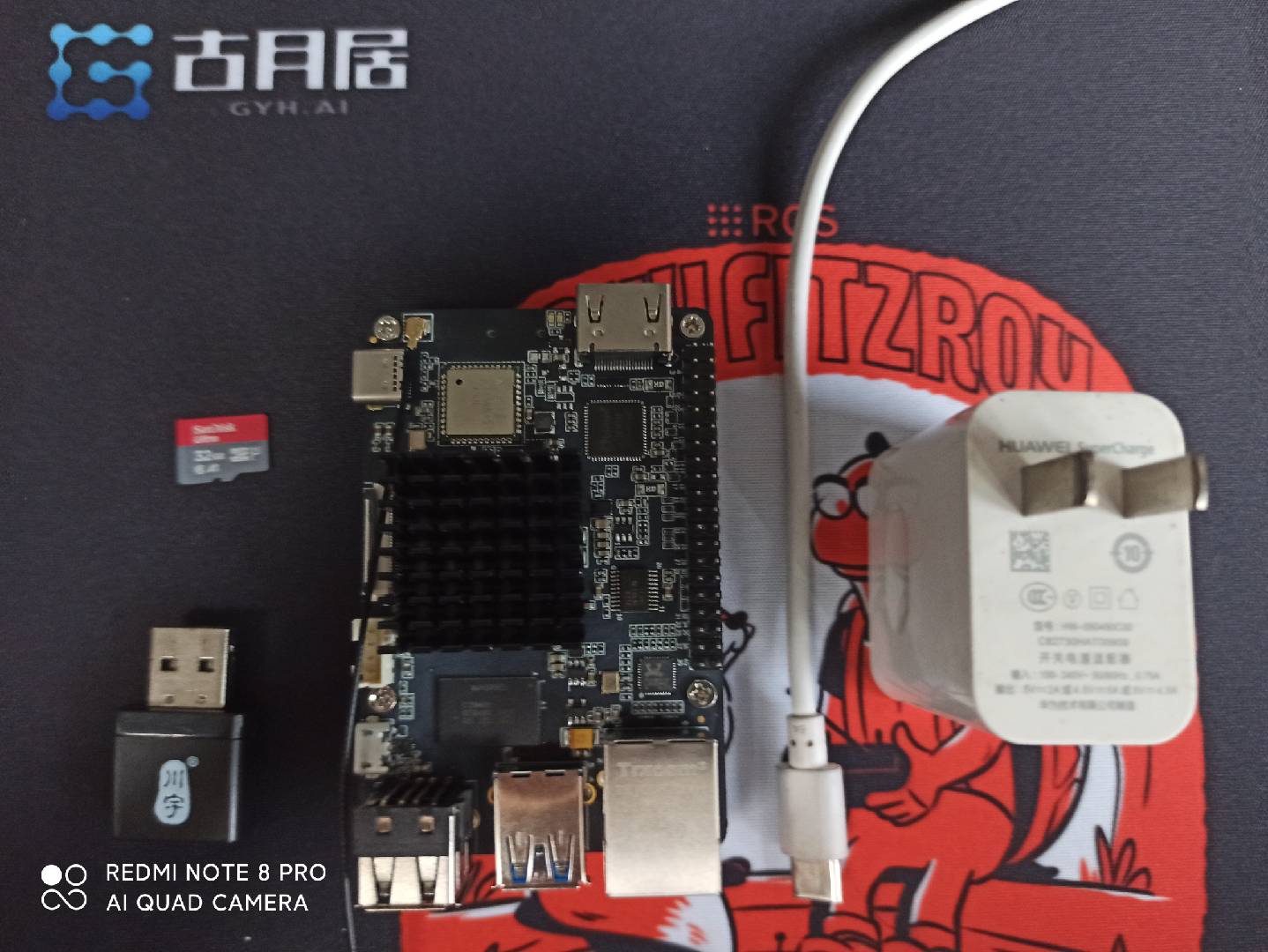
- 旭日x3派
- tf卡
有的tf卡可能烧录成功但无法正常开机,建议采用16GB以上,带有C10标志的闪迪tf卡,如下图中所标记的黑框
- tf读卡器
普通的读卡器即可 - type c电源线
- 输出为5V 2A的充电器
系统镜像烧录
step1: 使用balenaEtcher的linux版本(balenaEtche为APPImage类型,无需安装直接点击使用)和桌面版镜像
step2: balenaEtcher中依次选择镜像文件system_sdcard.img,设备为tf卡,flash开始烧录
step3: 出现Flash Complete即完成了烧录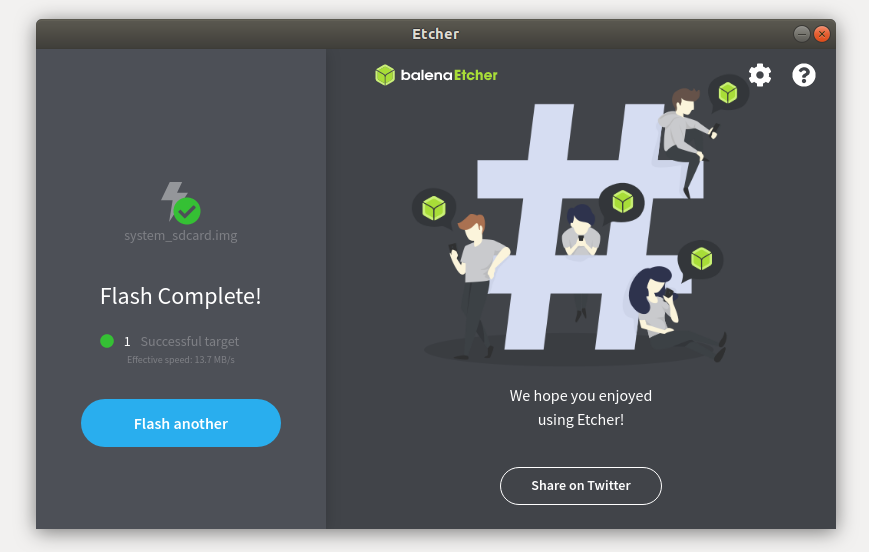
开机
step1: 将tf卡插入旭日X3派,并接入显示器接口,再上电,等待1~2分钟左右后,会进入系统桌面,若未刷新出桌面可重启几次显示器
字体很清爽,桌面版反应速度也能接受~
step2:再将个人pc与旭日x3派连接至同一个局域网下,用vnc远程连接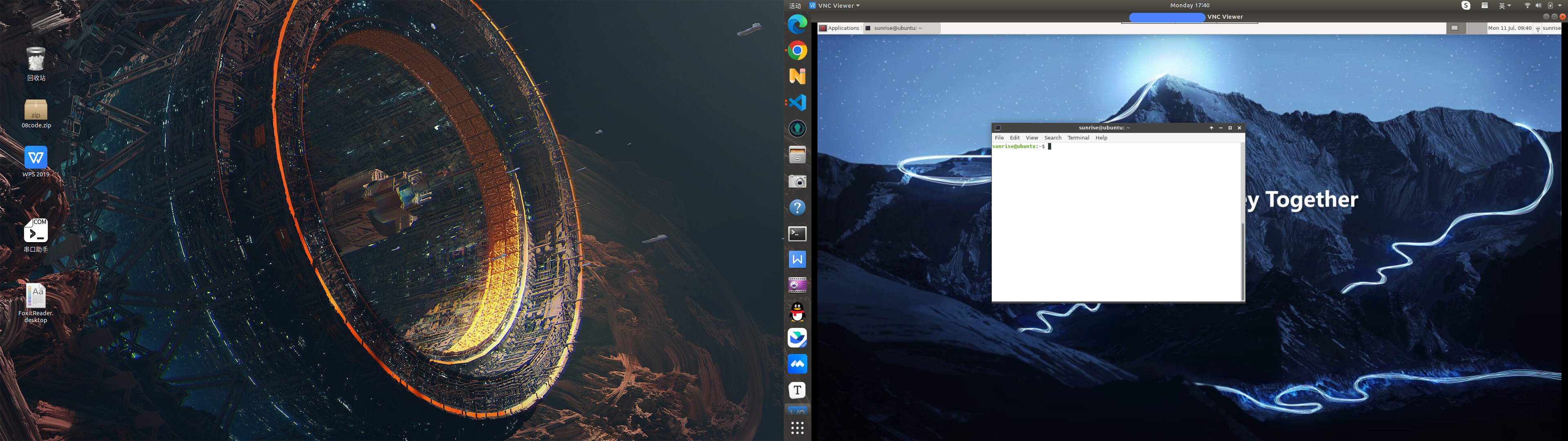
step3:
点击wifi图标->Edit Connections中忘记其他wifi,以防下次开机后连接到其他wifi信号
ros1安装
旭日x3派镜像系统为ubuntu20,所对应的ros1版本为ros noetic,按照ros wiki安装教程即可wiki.ros.org/noetic/Installation/Ubuntu,网络良好的情况下基本可以顺序安装,roscore正常启动
- turtlesim
运行ros里经典的小海龟例程
新建终端页rosrun turtlesim turtlesim_node
小海龟示例运行正常rosrun turtlesim turtle_teleop_key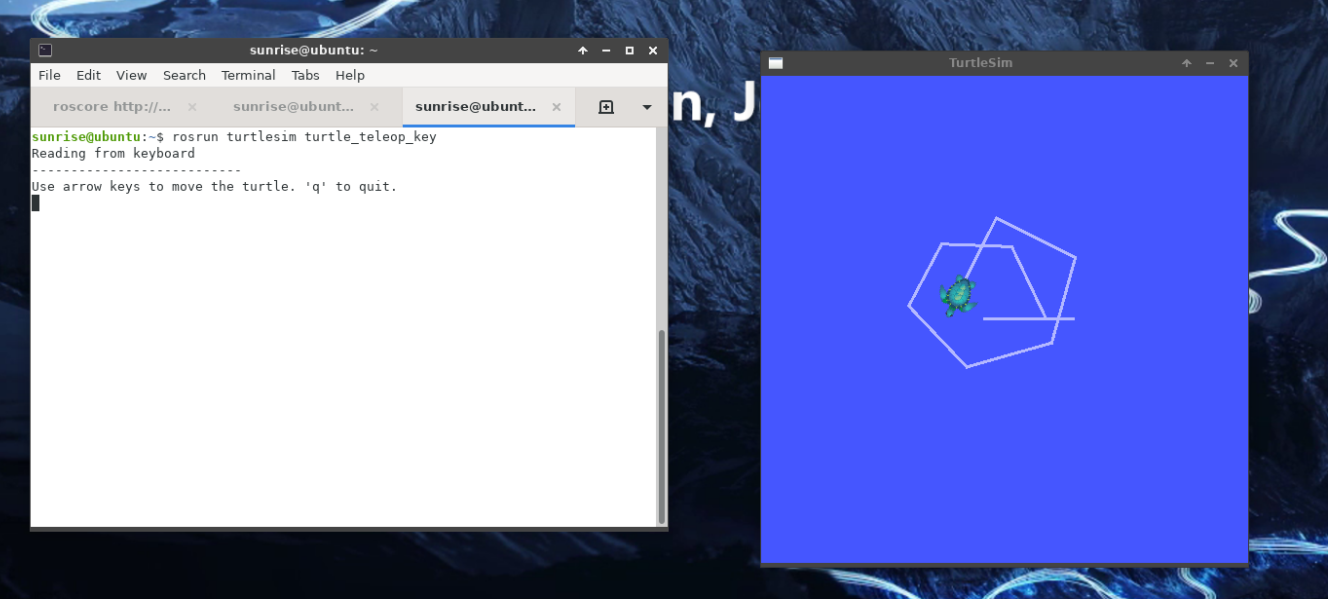
- rviz
rviz暂时无法运行,gazebo同理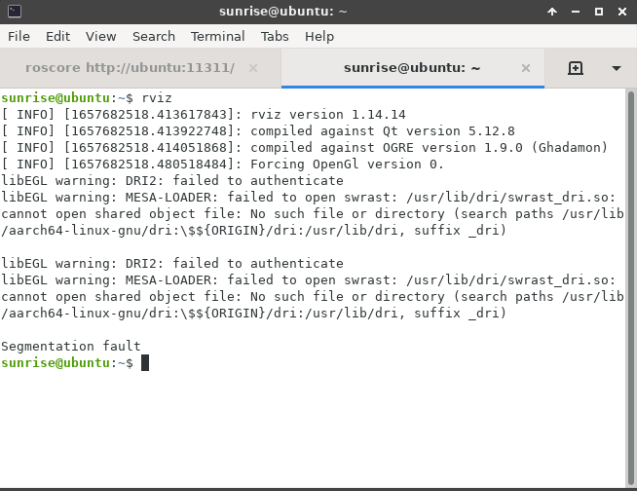
官方回复原因为板卡暂不支持
TogetherROS安装
参考的地平线机器人开发平台用户手册https://developer.horizon.ai/api/v1/fileData/TogetherROS/index.html
这里采用deb安装方式
sudo apt install hhp
ls /opt/

终端出现Generation complete且/opt目录下出现tros时表示安装成功
- hello world
新建终端1
新建终端2source /opt/tros/local_setup.bash ros2 run examples_rclcpp_minimal_subscriber subscriber_member_function
终端中显示消息收发正常source /opt/tros/local_setup.bash ros2 run examples_rclcpp_minimal_publisher publisher_member_function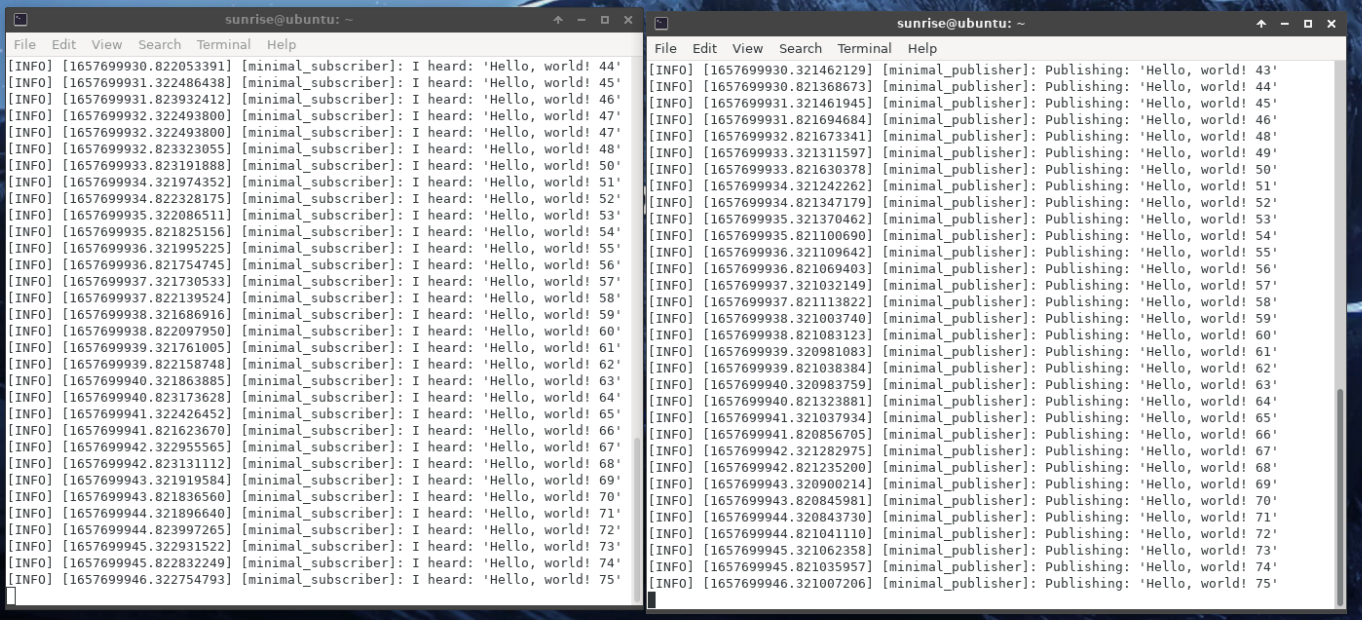
TogetherROS已验证成功安装

评论(0)
您还未登录,请登录后发表或查看评论