

开发环境:Ubuntu 18.04 LTS + ROS Melodic + ViSP 3.3.1
文章内容主要参考ViSP官方教学文档:https://visp-doc.inria.fr/doxygen/visp-daily/tutorial_mainpage.html
本文主要介绍了如何使用ViSP实现特定形状模板的跟踪,本文主要参考了template-tracker中的tutorial-template-tracker.cpp 例程。首先要获取这个例程文件并编译它
svn export https://github.com/lagadic/visp.git/trunk/tutorial/tracking/template-tracker
cd template-tracker/
mkdir build
cd build
cmake .. -DCMAKE_BUILD_TYPE=Release -DVISP_DIR=$VISP_WS/visp-build
make
执行例程,查看效果
./tutorial-template-tracker
点击鼠标左键绘制模板形状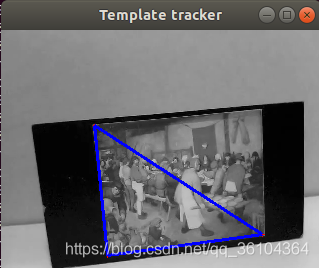
点击鼠标右键开始跟踪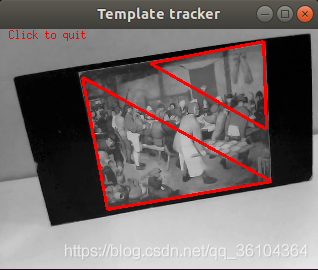
下面介绍一下代码实现过程
#include <visp3/gui/vpDisplayGDI.h>
#include <visp3/gui/vpDisplayOpenCV.h>
#include <visp3/gui/vpDisplayX.h>
#include <visp3/io/vpVideoReader.h>
#include <visp3/tt/vpTemplateTrackerSSDInverseCompositional.h>
#include <visp3/tt/vpTemplateTrackerWarpHomography.h>
int main(int argc, char **argv)
{
#if defined(VISP_HAVE_OPENCV) && (VISP_HAVE_OPENCV_VERSION >= 0x020100)
std::string opt_videoname = "bruegel.mp4";
unsigned int opt_subsample = 1;
for (int i = 0; i < argc; i++) {
if (std::string(argv[i]) == "--videoname")
opt_videoname = std::string(argv[i + 1]);
else if (std::string(argv[i]) == "--subsample")
opt_subsample = static_cast<unsigned int>(std::atoi(argv[i + 1]));
else if (std::string(argv[i]) == "--help" || std::string(argv[i]) == "-h") {
std::cout << "\nUsage: " << argv[0] << " [--videoname <video name>] [--subsample <scale factor>] [--help] [-h]\n" << std::endl;
return 0;
}
}
std::cout << "Video name: " << opt_videoname << std::endl;
vpImage<unsigned char> I, Iacq;
vpVideoReader g;
g.setFileName(opt_videoname);
g.open(Iacq);
Iacq.subsample(opt_subsample, opt_subsample, I);
#if defined(VISP_HAVE_X11)
vpDisplayX display;
#elif defined(VISP_HAVE_GDI)
vpDisplayGDI display;
#elif defined(VISP_HAVE_OPENCV)
vpDisplayOpenCV display;
#else
std::cout << "No image viewer is available..." << std::endl;
#endif
display.setDownScalingFactor(vpDisplay::SCALE_AUTO);
display.init(I, 100, 100, "Template tracker");
vpDisplay::display(I);
vpDisplay::flush(I);
vpTemplateTrackerWarpHomography warp;//定义基于单应性矩阵的warp,有多种warp计算方式可以选择
vpTemplateTrackerSSDInverseCompositional tracker(&warp);//定义基于SSD的跟踪算法
tracker.setSampling(2, 2);//从2*2的范围内选择一个像素来创建参考模板,该值越大则跟踪越快
tracker.setLambda(0.001);//优化过程中的增益参数
tracker.setIterationMax(200);//最大优化迭代次数
tracker.setPyramidal(2, 1);//金字塔的第一级和最后一级,级别越少跟踪速度越快
tracker.initClick(I);
while (1) {
double t = vpTime::measureTimeMs();
g.acquire(Iacq);
Iacq.subsample(opt_subsample, opt_subsample, I);
vpDisplay::display(I);
tracker.track(I);
vpColVector p = tracker.getp();
vpHomography H = warp.getHomography(p);
std::cout << "Homography: \n" << H << std::endl;
tracker.display(I, vpColor::red);
vpDisplay::displayText(I, 10*vpDisplay::getDownScalingFactor(I), 10*vpDisplay::getDownScalingFactor(I),
"Click to quit", vpColor::red);
if (vpDisplay::getClick(I, false))
break;
vpDisplay::flush(I);
if (! g.isVideoFormat()) {
vpTime::wait(t, 40);
}
}
#else
(void)argc;
(void)argv;
#endif
}
如果大家对于深度学习与计算机视觉领域感兴趣,希望获得更多的知识分享与最新的论文解读,欢迎关注我的个人公众号“深视”。



评论(0)
您还未登录,请登录后发表或查看评论