

本文对应的 Gitbook 为:https://daomingchen.gitbook.io/autonomous-mobile-robots/
轮式机器人由于其简单和高效的机构,是所有移动机器人中最常见的种类。对于轮式机器人来说,平衡性往往非常容易达到。因此轮式机器人的研究往往更加注重轮子的种类,数量,排布及其所组成的机构的稳定性 (Stability),操控性 (Maneuverability),和控制性 (Controllability)。
1. 轮子的设计
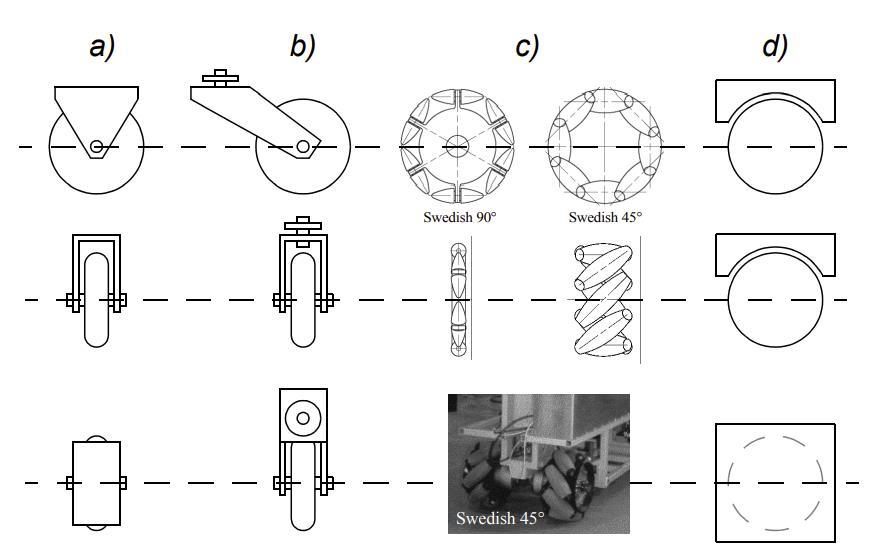
目前主要有四个种类的轮子,他们分别是:a) 标准轮,b) 脚轮,c) Swedish 轮,d) 球轮。这四种轮子有着不同的运动学约束,因此会影响机器人的运动学建模。
1.1 标准轮
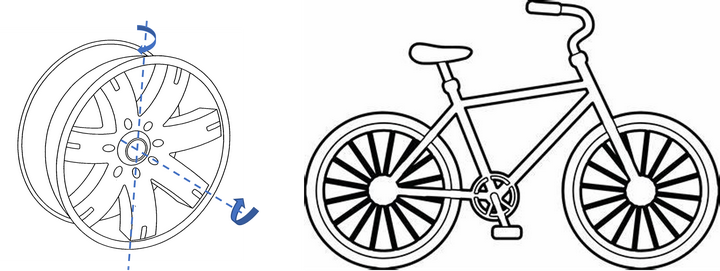
标准轮共有两个自由度,主转轴和垂直转轴。绕着主轴旋转即向前运动,绕着垂直轴旋转则是提供转向。常见的标准轮的应用有自行车和汽车。这两者在运动学上可以共用自行车模型,即前轮为 2DOF 的转向标准轮,后轮为垂直轴锁死的固定标准轮。
1.2 脚轮
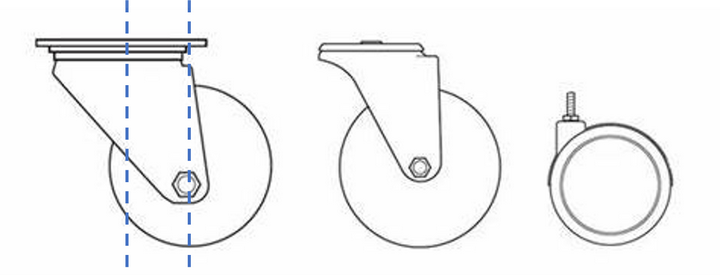
与标准轮一样,具有两个自由度。但他们的区别在于脚轮的垂直轴并不与地面直接接触。这样一个具有偏移的轴位,导致脚轮在调向的过程中会产生一个力矩,使得脚轮可以很快的转向调向后的方向。脚轮常常被用在人力推动物上,如可以滑动的椅子。
1.3 Swedish 轮
Swedish 轮是在标准轮的轮毂上又套了一层滚子。常见的 Swedish 轮有 45° Swedish 轮,又叫麦克纳姆轮,如下图 (a) 所示;还有 90° Swedish 轮,如下图 (b)。Swedish 轮共有三个自由度,分别是绕着轮子主轴转动;绕着滚子的轴心转动;和绕着轮子和地面的接触点转动。因此,Swedish 轮既可以像标准轮一样前向运动,也可以在滚子的方向上侧向移动。由 Swedish 轮可以构建全向运动的机器人。

1.4 球轮
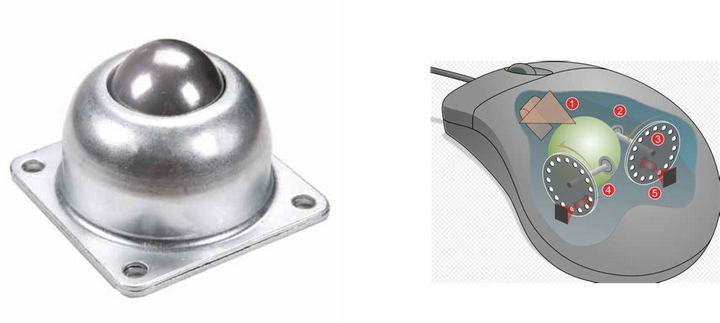
球轮的任意一个切面都可以被当作标准轮,因此球轮是一个前方向轮。球轮是早期鼠标的重要部件之一。
1.5 随动轮
以上的轮子在设计机器人时即可以与驱动器连接作为主动轮使用,也可以作为为机器人提供支撑的随动轮。但各有优劣。常用的随动轮是脚轮和球轮,但脚轮在转向时会因力矩原因对机器人的运动有一定的影响;而球轮的空隙则容易因积灰而导致卡死。
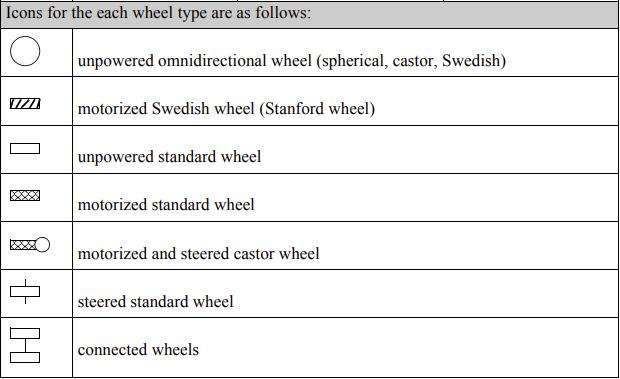
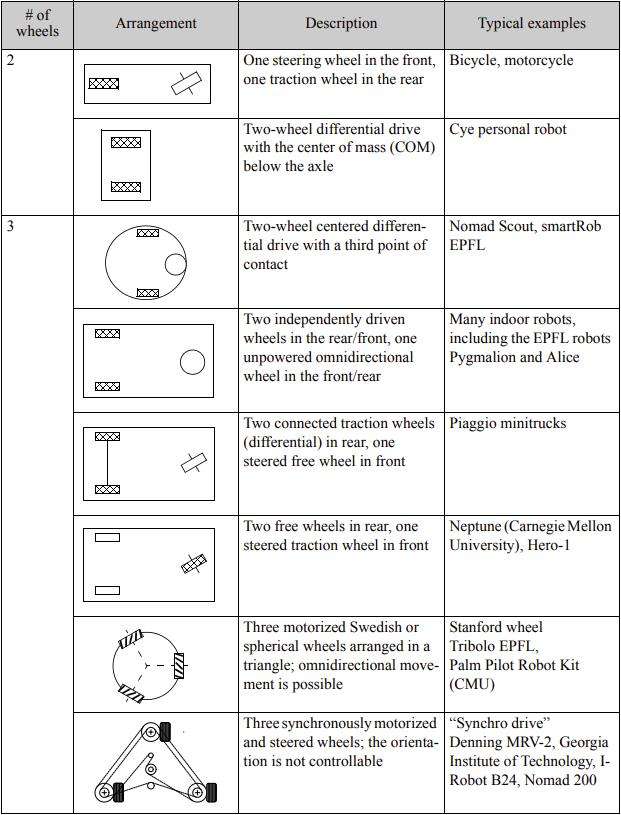
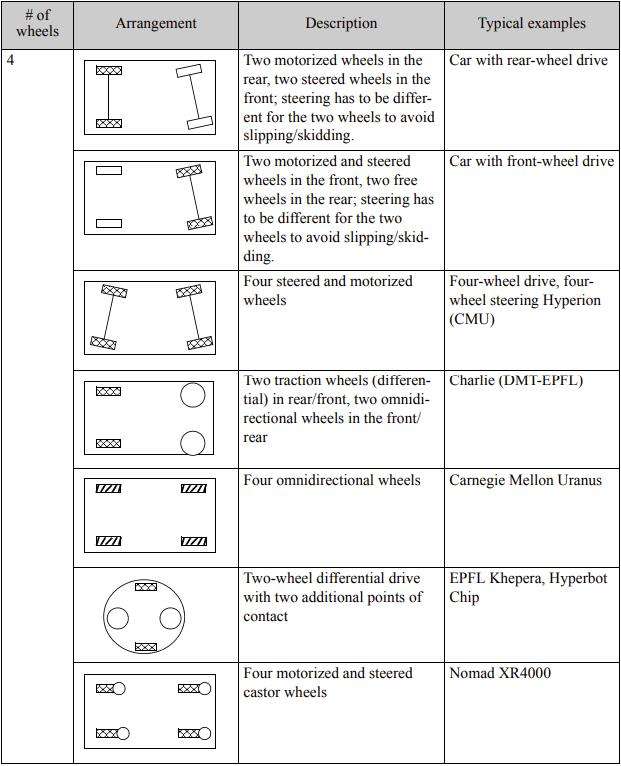
2. 移动机器人的底盘布局
根据底盘上轮子的种类,数量以及分布可以归纳出如下表所示的机器人底盘分布:
3. 性能分析
3.1 稳定性
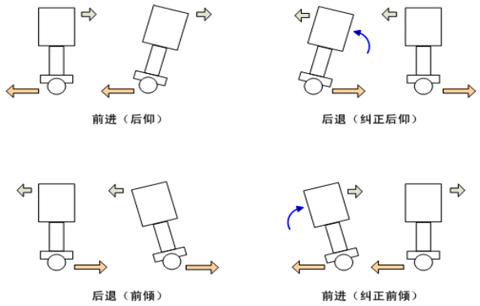
如之前所说,轮式机器人的轮子数量只要超过 3 个就可以非常容易的维持稳定。因此,这里我们重点介绍只有两个轮子的机器人,平衡车。当两轮车的质心位于轮轴线之下是,是静态稳定的;但是位于轴线之上时,则是静态不稳定的。而我们常见的平衡车就属于后者。平衡车通常采用的运动方式为动态稳定,即将平衡车抽象为一个倒立摆模型,当摆向前倾倒时,提供一个前向速度便可以使车维持稳定;后倒同理。
3.2 操纵性
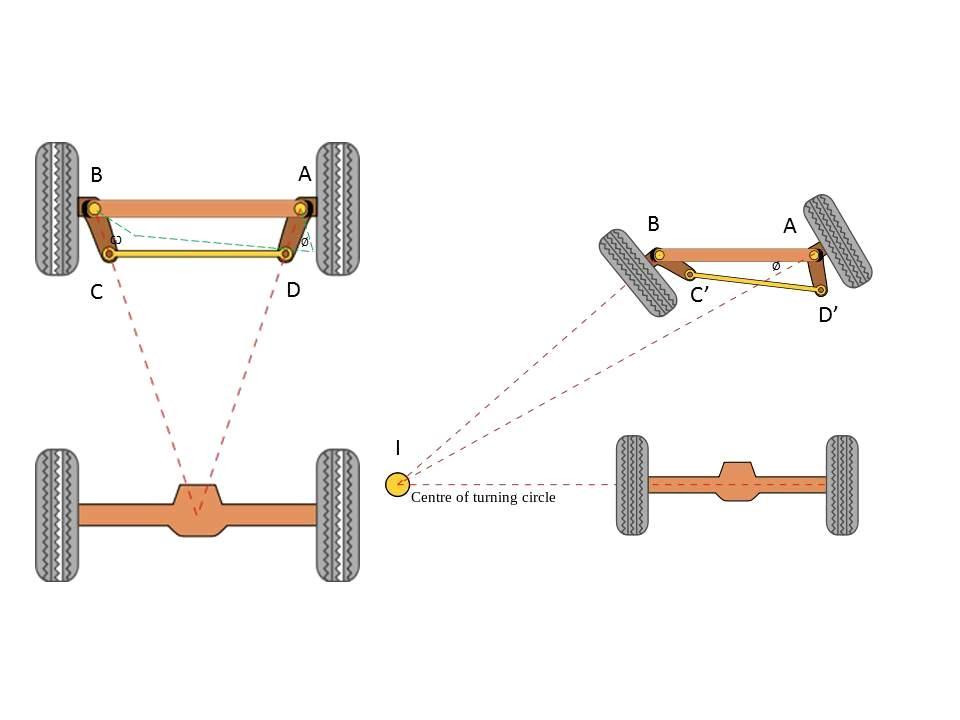
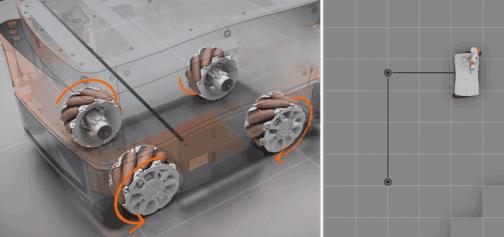
操纵性是指机器人运动的行为方式,比如使用阿克曼底盘的汽车,只能沿轮平面方向前进和绕着一个中心点转弯。而使用 Swedish 轮的车辆则可以全方向的移动。
3.3 控制性
控制性则是为了达成所需要的操纵而提供的驱动器配置。比如,阿克曼底盘需要后轮驱动和前轮转向的两个控制器,Swedish 轮则需要每个轮子都有单独的驱动器以提供全向移动。
本文使用 Zhihu On VSCode 创作并发布


评论(0)
您还未登录,请登录后发表或查看评论