7 视觉里程计 1
理论部分
理论部分
复制
视觉里程计
视觉里程计
复制
视觉里程计
视觉里程计
1.概念:什么是里程计?
在里程计问题中,我们希望测量一个运动物体的轨迹。这可以通过许多不同的手段来实现。例如,我们在汽车轮胎上安装计数码盘,就可以得到轮胎转动的距离,从而得到汽车的估计。或者,也可以测量汽车的速度、加速度,通过时间积分来计算它的位移。完成这种运动估计的装置(包括硬件和算法)叫做里程计(Odometry)。
2.特性:里程计的特性?
里程计一个很重要的特性,是它只关心局部时间上的运动,多数时候是指两个时刻间的运动。当我们以某种间隔对时间进行采样时,就可估计运动物体在各时间间隔之内的运动。由于这个估计受噪声影响,先前时刻的估计误差,会累加到后面时间的运动之上,这种现象称为漂移(Drift)。
3.概念:什么是视觉里程计?
视觉里程计VO的目标是根据拍摄的图像估计相机的运动。它的主要方式分为特征点法和直接方法。其中,特征点方法目前占据主流,能够在噪声较大、相机运动较快时工作,但地图则是稀疏特征点;直接方法不需要提特征,能够建立稠密地图,但存在着计算量大、鲁棒性不好的缺陷。
1.概念:什么是里程计? 在里程计问题中,我们希望测量一个运动物体的轨迹。这可以通过许多不同的手段来实现。例如,我们在汽车轮胎上安装计数码盘,就可以得到轮胎转动的距离,从而得到汽车的估计。或者,也可以测量汽车的速度、加速度,通过时间积分来计算它的位移。完成这种运动估计的装置(包括硬件和算法)叫做里程计(Odometry)。 2.特性:里程计的特性? 里程计一个很重要的特性,是它只关心局部时间上的运动,多数时候是指两个时刻间的运动。当我们以某种间隔对时间进行采样时,就可估计运动物体在各时间间隔之内的运动。由于这个估计受噪声影响,先前时刻的估计误差,会累加到后面时间的运动之上,这种现象称为漂移(Drift)。 3.概念:什么是视觉里程计? 视觉里程计VO的目标是根据拍摄的图像估计相机的运动。它的主要方式分为特征点法和直接方法。其中,特征点方法目前占据主流,能够在噪声较大、相机运动较快时工作,但地图则是稀疏特征点;直接方法不需要提特征,能够建立稠密地图,但存在着计算量大、鲁棒性不好的缺陷。
1.概念:什么是里程计? 在里程计问题中,我们希望测量一个运动物体的轨迹。这可以通过许多不同的手段来实现。例如,我们在汽车轮胎上安装计数码盘,就可以得到轮胎转动的距离,从而得到汽车的估计。或者,也可以测量汽车的速度、加速度,通过时间积分来计算它的位移。完成这种运动估计的装置(包括硬件和算法)叫做里程计(Odometry)。 2.特性:里程计的特性? 里程计一个很重要的特性,是它只关心局部时间上的运动,多数时候是指两个时刻间的运动。当我们以某种间隔对时间进行采样时,就可估计运动物体在各时间间隔之内的运动。由于这个估计受噪声影响,先前时刻的估计误差,会累加到后面时间的运动之上,这种现象称为漂移(Drift)。 3.概念:什么是视觉里程计? 视觉里程计VO的目标是根据拍摄的图像估计相机的运动。它的主要方式分为特征点法和直接方法。其中,特征点方法目前占据主流,能够在噪声较大、相机运动较快时工作,但地图则是稀疏特征点;直接方法不需要提特征,能够建立稠密地图,但存在着计算量大、鲁棒性不好的缺陷。
复制
1.概念:什么是里程计? 在里程计问题中,我们希望测量一个运动物体的轨迹。这可以通过许多不同的手段来实现。例如,我们在汽车轮胎上安装计数码盘,就可以得到轮胎转动的距离,从而得到汽车的估计。或者,也可以测量汽车的速度、加速度,通过时间积分来计算它的位移。完成这种运动估计的装置(包括硬件和算法)叫做里程计(Odometry)。 2.特性:里程计的特性? 里程计一个很重要的特性,是它只关心局部时间上的运动,多数时候是指两个时刻间的运动。当我们以某种间隔对时间进行采样时,就可估计运动物体在各时间间隔之内的运动。由于这个估计受噪声影响,先前时刻的估计误差,会累加到后面时间的运动之上,这种现象称为漂移(Drift)。 3.概念:什么是视觉里程计? 视觉里程计VO的目标是根据拍摄的图像估计相机的运动。它的主要方式分为特征点法和直接方法。其中,特征点方法目前占据主流,能够在噪声较大、相机运动较快时工作,但地图则是稀疏特征点;直接方法不需要提特征,能够建立稠密地图,但存在着计算量大、鲁棒性不好的缺陷。
复制
本章内容
1 特征点如何提取并且匹配
2 利用对极约束方法从 2 D − 2 D 2D-2D 2D−2D匹配好的特征点估计相机运动
3 使用三角测量方法从 2 D − 2 D 2D-2D 2D−2D匹配估计一个点的空间位置
4 3 D − 2 D 3D-2D 3D−2D的 P n P PnP PnP问题的线性解法和 B o u n d A d j u s t m e n t Bound Adjustment BoundAdjustment解法
5 3 D − 3 D 3D-3D 3D−3D的 I C P ICP ICP问题的线性解法和 B o u n d A d j u s t m e n t Bound Adjustment BoundAdjustment解法
本章内容 1 特征点如何提取并且匹配 2 利用对极约束方法从 2 D − 2 D 2D-2D 2D−2D匹配好的特征点估计相机运动 3 使用三角测量方法从 2 D − 2 D 2D-2D 2D−2D匹配估计一个点的空间位置 4 3 D − 2 D 3D-2D 3D−2D的 P n P PnP PnP问题的线性解法和 B o u n d A d j u s t m e n t Bound Adjustment BoundAdjustment解法 5 3 D − 3 D 3D-3D 3D−3D的 I C P ICP ICP问题的线性解法和 B o u n d A d j u s t m e n t Bound Adjustment BoundAdjustment解法
本章内容 1 特征点如何提取并且匹配 2 利用对极约束方法从 2 D − 2 D 2D-2D 2D−2D匹配好的特征点估计相机运动 3 使用三角测量方法从 2 D − 2 D 2D-2D 2D−2D匹配估计一个点的空间位置 4 3 D − 2 D 3D-2D 3D−2D的 P n P PnP PnP问题的线性解法和 B o u n d A d j u s t m e n t Bound Adjustment BoundAdjustment解法 5 3 D − 3 D 3D-3D 3D−3D的 I C P ICP ICP问题的线性解法和 B o u n d A d j u s t m e n t Bound Adjustment BoundAdjustment解法
复制
本章内容 1 特征点如何提取并且匹配 2 利用对极约束方法从 2 D − 2 D 2D-2D 2D−2D匹配好的特征点估计相机运动 3 使用三角测量方法从 2 D − 2 D 2D-2D 2D−2D匹配估计一个点的空间位置 4 3 D − 2 D 3D-2D 3D−2D的 P n P PnP PnP问题的线性解法和 B o u n d A d j u s t m e n t Bound Adjustment BoundAdjustment解法 5 3 D − 3 D 3D-3D 3D−3D的 I C P ICP ICP问题的线性解法和 B o u n d A d j u s t m e n t Bound Adjustment BoundAdjustment解法
复制
常见的特征点
SIFT 尺度不变特征变换
SURF
ORB 具有代表性的实时图像特征
提取ORB特征的两个步骤:
FAST角点提取
BRIEF描述子
FAST角点提取 BRIEF描述子
FAST角点提取 BRIEF描述子
复制
FAST角点提取 BRIEF描述子
复制
改进的FAST 关键点(Oriented FAST)
(FAST是一种角点,主要检测局部像素灰度变化明显的地方,以速度快著称。它的一个思想是:如果一个像素与邻域像素的差别较大(过亮或过暗),那么它更可能是角点。
图像块的质心
特征点方向
BRIEF(Binary Robust Independent Elementary Feature) 是二进制描述子,它的描述向量是由许多个0和1组成,这里的0和1编码了关键点附近的两个像素 p和 q 的大小关系,如果 p > q p>q p>q,则取1;反之取0。
大体上按照某种概率分布,随机的挑选 p和 q 的位置,最终选取128对这样的 p p p和 q q q构成128维向量
大体上按照某种概率分布,随机的挑选 p和 q 的位置,最终选取128对这样的 p p p和 q q q构成128维向量
大体上按照某种概率分布,随机的挑选 p和 q 的位置,最终选取128对这样的 p p p和 q q q构成128维向量
特征匹配
编译运行代码结果如下:
通过KDevelop调试 注意参数的传递
注意参数的传递
注意参数的传递
同时调试器要改为 GDB
GDB
结果:
GDB
结果: 代码及注释如下: 代码及注释如下:
#include <iostream>
#include <opencv2/core/core.hpp>
#include <opencv2/features2d/features2d.hpp>
#include <opencv2/highgui/highgui.hpp>
#include <chrono>
using namespace std;
using namespace cv;
int main(int argc, char **argv) {
if (argc != 3) {
cout << "usage: feature_extraction img1 img2" << endl;
return 1;
}
//-- 读取图像
Mat img_1 = imread(argv[1], CV_LOAD_IMAGE_COLOR);
Mat img_2 = imread(argv[2], CV_LOAD_IMAGE_COLOR);
assert(img_1.data != nullptr && img_2.data != nullptr);
//-- 初始化
std::vector<KeyPoint> keypoints_1, keypoints_2; //关键点
Mat descriptors_1, descriptors_2; //描述子
Ptr<FeatureDetector> detector = ORB::create();//Oriented FAST 角点
Ptr<DescriptorExtractor> descriptor = ORB::create();// BRIEF 描述子
Ptr<DescriptorMatcher> matcher = DescriptorMatcher::create("BruteForce-Hamming"); //汉明距离
//-- 第一步:检测 Oriented FAST 角点位置
chrono::steady_clock::time_point t1 = chrono::steady_clock::now();
detector->detect(img_1, keypoints_1);
detector->detect(img_2, keypoints_2);
//-- 第二步:根据角点位置计算 BRIEF 描述子
descriptor->compute(img_1, keypoints_1, descriptors_1);
descriptor->compute(img_2, keypoints_2, descriptors_2);
chrono::steady_clock::time_point t2 = chrono::steady_clock::now();
chrono::duration<double> time_used = chrono::duration_cast<chrono::duration<double>>(t2 - t1);
cout << "extract ORB cost = " << time_used.count() << " seconds. " << endl;
Mat outimg1;
drawKeypoints(img_1, keypoints_1, outimg1, Scalar::all(-1), DrawMatchesFlags::DEFAULT);
imshow("ORB features", outimg1);
//-- 第三步:对两幅图像中的BRIEF描述子进行匹配,使用 Hamming 距离
vector<DMatch> matches; //未筛选匹配
t1 = chrono::steady_clock::now();
matcher->match(descriptors_1, descriptors_2, matches);
t2 = chrono::steady_clock::now();
time_used = chrono::duration_cast<chrono::duration<double>>(t2 - t1);
cout << "match ORB cost = " << time_used.count() << " seconds. " << endl;
//-- 第四步:匹配点对筛选
// 计算最小距离和最大距离
auto min_max = minmax_element(matches.begin(), matches.end(),
[](const DMatch &m1, const DMatch &m2) { return m1.distance < m2.distance; });
double min_dist = min_max.first->distance;
double max_dist = min_max.second->distance;
printf("-- Max dist : %f \n", max_dist);
printf("-- Min dist : %f \n", min_dist);
//当描述子之间的距离大于两倍的最小距离时,即认为匹配有误.但有时候最小距离会非常小,设置一个经验值30作为下限.
std::vector<DMatch> good_matches; //筛选匹配,汉明距离小于最小距离的两倍
for (int i = 0; i < descriptors_1.rows; i++) {
if (matches[i].distance <= max(2 * min_dist, 30.0)) {
good_matches.push_back(matches[i]);
}
}
//-- 第五步:绘制匹配结果
Mat img_match;
Mat img_goodmatch;
drawMatches(img_1, keypoints_1, img_2, keypoints_2, matches, img_match);
drawMatches(img_1, keypoints_1, img_2, keypoints_2, good_matches, img_goodmatch);
imshow("all matches", img_match);
imshow("good matches", img_goodmatch);
waitKey(0);
return 0;
}
#include <iostream> #include <opencv2/core/core.hpp> #include <opencv2/features2d/features2d.hpp> #include <opencv2/highgui/highgui.hpp> #include <chrono> using namespace std; using namespace cv; int main(int argc, char **argv) { if (argc != 3) { cout << "usage: feature_extraction img1 img2" << endl; return 1; } //-- 读取图像 Mat img_1 = imread(argv[1], CV_LOAD_IMAGE_COLOR); Mat img_2 = imread(argv[2], CV_LOAD_IMAGE_COLOR); assert(img_1.data != nullptr && img_2.data != nullptr); //-- 初始化 std::vector<KeyPoint> keypoints_1, keypoints_2; //关键点 Mat descriptors_1, descriptors_2; //描述子 Ptr<FeatureDetector> detector = ORB::create();//Oriented FAST 角点 Ptr<DescriptorExtractor> descriptor = ORB::create();// BRIEF 描述子 Ptr<DescriptorMatcher> matcher = DescriptorMatcher::create("BruteForce-Hamming"); //汉明距离 //-- 第一步:检测 Oriented FAST 角点位置 chrono::steady_clock::time_point t1 = chrono::steady_clock::now(); detector->detect(img_1, keypoints_1); detector->detect(img_2, keypoints_2); //-- 第二步:根据角点位置计算 BRIEF 描述子 descriptor->compute(img_1, keypoints_1, descriptors_1); descriptor->compute(img_2, keypoints_2, descriptors_2); chrono::steady_clock::time_point t2 = chrono::steady_clock::now(); chrono::duration<double> time_used = chrono::duration_cast<chrono::duration<double>>(t2 - t1); cout << "extract ORB cost = " << time_used.count() << " seconds. " << endl; Mat outimg1; drawKeypoints(img_1, keypoints_1, outimg1, Scalar::all(-1), DrawMatchesFlags::DEFAULT); imshow("ORB features", outimg1); //-- 第三步:对两幅图像中的BRIEF描述子进行匹配,使用 Hamming 距离 vector<DMatch> matches; //未筛选匹配 t1 = chrono::steady_clock::now(); matcher->match(descriptors_1, descriptors_2, matches); t2 = chrono::steady_clock::now(); time_used = chrono::duration_cast<chrono::duration<double>>(t2 - t1); cout << "match ORB cost = " << time_used.count() << " seconds. " << endl; //-- 第四步:匹配点对筛选 // 计算最小距离和最大距离 auto min_max = minmax_element(matches.begin(), matches.end(), [](const DMatch &m1, const DMatch &m2) { return m1.distance < m2.distance; }); double min_dist = min_max.first->distance; double max_dist = min_max.second->distance; printf("-- Max dist : %f \n", max_dist); printf("-- Min dist : %f \n", min_dist); //当描述子之间的距离大于两倍的最小距离时,即认为匹配有误.但有时候最小距离会非常小,设置一个经验值30作为下限. std::vector<DMatch> good_matches; //筛选匹配,汉明距离小于最小距离的两倍 for (int i = 0; i < descriptors_1.rows; i++) { if (matches[i].distance <= max(2 * min_dist, 30.0)) { good_matches.push_back(matches[i]); } } //-- 第五步:绘制匹配结果 Mat img_match; Mat img_goodmatch; drawMatches(img_1, keypoints_1, img_2, keypoints_2, matches, img_match); drawMatches(img_1, keypoints_1, img_2, keypoints_2, good_matches, img_goodmatch); imshow("all matches", img_match); imshow("good matches", img_goodmatch); waitKey(0); return 0; }
#include <iostream> #include <opencv2/core/core.hpp> #include <opencv2/features2d/features2d.hpp> #include <opencv2/highgui/highgui.hpp> #include <chrono> using namespace std; using namespace cv; int main(int argc, char **argv) { if (argc != 3) { cout << "usage: feature_extraction img1 img2" << endl; return 1; } //-- 读取图像 Mat img_1 = imread(argv[1], CV_LOAD_IMAGE_COLOR); Mat img_2 = imread(argv[2], CV_LOAD_IMAGE_COLOR); assert(img_1.data != nullptr && img_2.data != nullptr); //-- 初始化 std::vector<KeyPoint> keypoints_1, keypoints_2; //关键点 Mat descriptors_1, descriptors_2; //描述子 Ptr<FeatureDetector> detector = ORB::create();//Oriented FAST 角点 Ptr<DescriptorExtractor> descriptor = ORB::create();// BRIEF 描述子 Ptr<DescriptorMatcher> matcher = DescriptorMatcher::create("BruteForce-Hamming"); //汉明距离 //-- 第一步:检测 Oriented FAST 角点位置 chrono::steady_clock::time_point t1 = chrono::steady_clock::now(); detector->detect(img_1, keypoints_1); detector->detect(img_2, keypoints_2); //-- 第二步:根据角点位置计算 BRIEF 描述子 descriptor->compute(img_1, keypoints_1, descriptors_1); descriptor->compute(img_2, keypoints_2, descriptors_2); chrono::steady_clock::time_point t2 = chrono::steady_clock::now(); chrono::duration<double> time_used = chrono::duration_cast<chrono::duration<double>>(t2 - t1); cout << "extract ORB cost = " << time_used.count() << " seconds. " << endl; Mat outimg1; drawKeypoints(img_1, keypoints_1, outimg1, Scalar::all(-1), DrawMatchesFlags::DEFAULT); imshow("ORB features", outimg1); //-- 第三步:对两幅图像中的BRIEF描述子进行匹配,使用 Hamming 距离 vector<DMatch> matches; //未筛选匹配 t1 = chrono::steady_clock::now(); matcher->match(descriptors_1, descriptors_2, matches); t2 = chrono::steady_clock::now(); time_used = chrono::duration_cast<chrono::duration<double>>(t2 - t1); cout << "match ORB cost = " << time_used.count() << " seconds. " << endl; //-- 第四步:匹配点对筛选 // 计算最小距离和最大距离 auto min_max = minmax_element(matches.begin(), matches.end(), [](const DMatch &m1, const DMatch &m2) { return m1.distance < m2.distance; }); double min_dist = min_max.first->distance; double max_dist = min_max.second->distance; printf("-- Max dist : %f \n", max_dist); printf("-- Min dist : %f \n", min_dist); //当描述子之间的距离大于两倍的最小距离时,即认为匹配有误.但有时候最小距离会非常小,设置一个经验值30作为下限. std::vector<DMatch> good_matches; //筛选匹配,汉明距离小于最小距离的两倍 for (int i = 0; i < descriptors_1.rows; i++) { if (matches[i].distance <= max(2 * min_dist, 30.0)) { good_matches.push_back(matches[i]); } } //-- 第五步:绘制匹配结果 Mat img_match; Mat img_goodmatch; drawMatches(img_1, keypoints_1, img_2, keypoints_2, matches, img_match); drawMatches(img_1, keypoints_1, img_2, keypoints_2, good_matches, img_goodmatch); imshow("all matches", img_match); imshow("good matches", img_goodmatch); waitKey(0); return 0; }
复制
#include <iostream> #include <opencv2/core/core.hpp> #include <opencv2/features2d/features2d.hpp> #include <opencv2/highgui/highgui.hpp> #include <chrono> using namespace std; using namespace cv; int main(int argc, char **argv) { if (argc != 3) { cout << "usage: feature_extraction img1 img2" << endl; return 1; } //-- 读取图像 Mat img_1 = imread(argv[1], CV_LOAD_IMAGE_COLOR); Mat img_2 = imread(argv[2], CV_LOAD_IMAGE_COLOR); assert(img_1.data != nullptr && img_2.data != nullptr); //-- 初始化 std::vector<KeyPoint> keypoints_1, keypoints_2; //关键点 Mat descriptors_1, descriptors_2; //描述子 Ptr<FeatureDetector> detector = ORB::create();//Oriented FAST 角点 Ptr<DescriptorExtractor> descriptor = ORB::create();// BRIEF 描述子 Ptr<DescriptorMatcher> matcher = DescriptorMatcher::create("BruteForce-Hamming"); //汉明距离 //-- 第一步:检测 Oriented FAST 角点位置 chrono::steady_clock::time_point t1 = chrono::steady_clock::now(); detector->detect(img_1, keypoints_1); detector->detect(img_2, keypoints_2); //-- 第二步:根据角点位置计算 BRIEF 描述子 descriptor->compute(img_1, keypoints_1, descriptors_1); descriptor->compute(img_2, keypoints_2, descriptors_2); chrono::steady_clock::time_point t2 = chrono::steady_clock::now(); chrono::duration<double> time_used = chrono::duration_cast<chrono::duration<double>>(t2 - t1); cout << "extract ORB cost = " << time_used.count() << " seconds. " << endl; Mat outimg1; drawKeypoints(img_1, keypoints_1, outimg1, Scalar::all(-1), DrawMatchesFlags::DEFAULT); imshow("ORB features", outimg1); //-- 第三步:对两幅图像中的BRIEF描述子进行匹配,使用 Hamming 距离 vector<DMatch> matches; //未筛选匹配 t1 = chrono::steady_clock::now(); matcher->match(descriptors_1, descriptors_2, matches); t2 = chrono::steady_clock::now(); time_used = chrono::duration_cast<chrono::duration<double>>(t2 - t1); cout << "match ORB cost = " << time_used.count() << " seconds. " << endl; //-- 第四步:匹配点对筛选 // 计算最小距离和最大距离 auto min_max = minmax_element(matches.begin(), matches.end(), [](const DMatch &m1, const DMatch &m2) { return m1.distance < m2.distance; }); double min_dist = min_max.first->distance; double max_dist = min_max.second->distance; printf("-- Max dist : %f \n", max_dist); printf("-- Min dist : %f \n", min_dist); //当描述子之间的距离大于两倍的最小距离时,即认为匹配有误.但有时候最小距离会非常小,设置一个经验值30作为下限. std::vector<DMatch> good_matches; //筛选匹配,汉明距离小于最小距离的两倍 for (int i = 0; i < descriptors_1.rows; i++) { if (matches[i].distance <= max(2 * min_dist, 30.0)) { good_matches.push_back(matches[i]); } } //-- 第五步:绘制匹配结果 Mat img_match; Mat img_goodmatch; drawMatches(img_1, keypoints_1, img_2, keypoints_2, matches, img_match); drawMatches(img_1, keypoints_1, img_2, keypoints_2, good_matches, img_goodmatch); imshow("all matches", img_match); imshow("good matches", img_goodmatch); waitKey(0); return 0; }
复制
复制
复制
手写ORB结果:
此部分还没完全理解,留一个坑,55555,
此部分还没完全理解,留一个坑,55555,
此部分还没完全理解,留一个坑,55555,
复制
此部分还没完全理解,留一个坑,55555,
复制
复制
复制
7.3 2D-3D:对极问题
2D2D,2D-3D,三角测量理论部分参考博客:
2D2D,2D-3D,三角测量理论部分参考博客:
视觉里程计1
编译运行代码结果如下:
[ INFO:0] Initialize OpenCL runtime...
-- Max dist : 95.000000
-- Min dist : 7.000000
一共找到了81组匹配点
fundamental_matrix is
[5.435453065936294e-06, 0.0001366043242989641, -0.02140890086948122;
-0.0001321142229824704, 2.339475702778057e-05, -0.006332906454396256;
0.02107630352202776, -0.00366683395295285, 1]
essential_matrix is
[0.01724015832721706, 0.328054335794133, 0.0473747783144249;
-0.3243229585962962, 0.03292958445202408, -0.6262554366073018;
-0.005885857752320116, 0.6253830041920333, 0.0153167864909267]
homography_matrix is
[0.91317517918067, -0.1092435315821776, 29.95860009981271;
0.02223560352310949, 0.9826008005061946, 6.50891083956826;
-0.0001001560381023939, 0.0001037779436396116, 1]
R is
[0.9985534106102478, -0.05339308467584758, 0.006345444621108698;
0.05321959721496264, 0.9982715997131746, 0.02492965459802003;
-0.007665548311697523, -0.02455588961730239, 0.9996690690694516]
t is
[-0.8829934995085544;
-0.05539655431450562;
0.4661048182498402]
t^R=
[-0.02438126572381045, -0.4639388908753606, -0.06699805400667856;
0.4586619266358499, -0.04656946493536188, 0.8856589319599302;
0.008323859859529846, -0.8844251262060034, -0.0216612071874423]
epipolar constraint = [0.004334754136721797]
epipolar constraint = [-0.0002809243685121809]
epipolar constraint = [-0.001438247945977744]
epipolar constraint = [0.0003269033947393973]
epipolar constraint = [-0.0003553231638489529]
epipolar constraint = [0.001284545296795364]
epipolar constraint = [0.0007111119070243033]
epipolar constraint = [0.0005809963024551446]
epipolar constraint = [-0.0004569505410570683]
epipolar constraint = [-0.0001985091674428126]
epipolar constraint = [0.0009954466629851014]
epipolar constraint = [0.004183444398105557]
epipolar constraint = [0.0003301500278483499]
epipolar constraint = [0.000433468422895756]
epipolar constraint = [0.002166463717508241]
epipolar constraint = [0.0008612142972820036]
epipolar constraint = [0.006260134367574832]
epipolar constraint = [0.007343864270669354]
epipolar constraint = [0.0006997299583792263]
epipolar constraint = [-0.0002735148772005716]
epipolar constraint = [-5.272337012321437e-07]
epipolar constraint = [0.0007372565015377822]
epipolar constraint = [-0.0006697357792934122]
epipolar constraint = [0.003123484301720714]
epipolar constraint = [-0.001231690598807428]
epipolar constraint = [0.0002668695748940936]
epipolar constraint = [0.004005543462373876]
epipolar constraint = [0.0003056705066544624]
epipolar constraint = [-0.003108414268527718]
epipolar constraint = [-1.915351944714594e-06]
epipolar constraint = [0.0006933459945522302]
epipolar constraint = [-1.20842520190817e-05]
epipolar constraint = [0.001931054288970224]
epipolar constraint = [-0.001327411567348349]
epipolar constraint = [-0.001158918062891631]
epipolar constraint = [-0.001858904428330923]
epipolar constraint = [0.0001556314587936695]
epipolar constraint = [-0.002373723544446836]
epipolar constraint = [0.004805889122330598]
epipolar constraint = [-0.0009747832347852675]
epipolar constraint = [0.0006571155616519331]
epipolar constraint = [0.002337204394122716]
epipolar constraint = [0.004765516758509947]
epipolar constraint = [-0.001750870050808317]
epipolar constraint = [0.001092859392827487]
epipolar constraint = [0.0006769492505509164]
epipolar constraint = [0.0003307429644405918]
epipolar constraint = [0.001876564994448115]
epipolar constraint = [0.001832354276950641]
epipolar constraint = [7.744615696386736e-07]
epipolar constraint = [-0.0007964236477854686]
epipolar constraint = [0.0001236409258935089]
epipolar constraint = [1.386843227244028e-06]
epipolar constraint = [0.0001450355326295741]
epipolar constraint = [0.00109731208246224]
epipolar constraint = [-0.002227053499071974]
epipolar constraint = [0.002240603253167585]
epipolar constraint = [0.0002359213388878484]
epipolar constraint = [0.003035338951631217]
epipolar constraint = [0.002650788007581513]
epipolar constraint = [-0.0002311129052587763]
epipolar constraint = [0.003158726652554816]
epipolar constraint = [0.00318443380492206]
epipolar constraint = [-0.0003030993775385848]
epipolar constraint = [-0.004151424678597325]
epipolar constraint = [0.000962908812924268]
epipolar constraint = [0.00166825104315349]
epipolar constraint = [-0.001953002815440141]
epipolar constraint = [-0.0024677215713114]
epipolar constraint = [0.0008218799177506786]
epipolar constraint = [1.369310688559278e-06]
epipolar constraint = [-0.001891259735584946]
epipolar constraint = [-0.0001304333417016107]
epipolar constraint = [0.0002565573533065552]
epipolar constraint = [0.006010380518284446]
epipolar constraint = [-0.0004837802950156331]
epipolar constraint = [0.00547529124350349]
epipolar constraint = [0.001722398975726524]
epipolar constraint = [-0.0004945848903547823]
epipolar constraint = [-0.004259380631293275]
epipolar constraint = [-0.0007738612238716719]
*** 已完成 ***
代码及注释如下: (部分类的调用没能明白,轻置小坑)
部分类的调用没能明白,轻置小坑
部分类的调用没能明白,轻置小坑
部分类的调用没能明白,轻置小坑制 )
#include <iostream>
#include <opencv2/core/core.hpp>
#include <opencv2/features2d/features2d.hpp>
#include <opencv2/highgui/highgui.hpp>
#include <opencv2/calib3d/calib3d.hpp>
// #include "extra.h" // use this if in OpenCV2
using namespace std;
using namespace cv;
/****************************************************
* 本程序演示了如何使用2D-2D的特征匹配估计相机运动
* **************************************************/
void find_feature_matches(
const Mat &img_1, const Mat &img_2,
std::vector<KeyPoint> &keypoints_1,
std::vector<KeyPoint> &keypoints_2,
std::vector<DMatch> &matches);
void pose_estimation_2d2d(
std::vector<KeyPoint> keypoints_1,
std::vector<KeyPoint> keypoints_2,
std::vector<DMatch> matches,
Mat &R, Mat &t);
// 像素坐标转相机归一化坐标
Point2d pixel2cam(const Point2d &p, const Mat &K);
int main(int argc, char **argv) {
if (argc != 3) {
cout << "usage: pose_estimation_2d2d img1 img2" << endl;
return 1;
}
//-- 读取图像
Mat img_1 = imread(argv[1], CV_LOAD_IMAGE_COLOR);
Mat img_2 = imread(argv[2], CV_LOAD_IMAGE_COLOR);
assert(img_1.data && img_2.data && "Can not load images!");
vector<KeyPoint> keypoints_1, keypoints_2;
vector<DMatch> matches;
find_feature_matches(img_1, img_2, keypoints_1, keypoints_2, matches);
cout << "一共找到了" << matches.size() << "组匹配点" << endl;
//-- 估计两张图像间运动
Mat R, t;
pose_estimation_2d2d(keypoints_1, keypoints_2, matches, R, t);
//-- 验证E=t^R*scale
Mat t_x =
(Mat_<double>(3, 3) << 0, -t.at<double>(2, 0), t.at<double>(1, 0),
t.at<double>(2, 0), 0, -t.at<double>(0, 0),
-t.at<double>(1, 0), t.at<double>(0, 0), 0);
cout << "t^R=" << endl << t_x * R << endl;
//-- 验证对极约束
Mat K = (Mat_<double>(3, 3) << 520.9, 0, 325.1, 0, 521.0, 249.7, 0, 0, 1);
for (DMatch m: matches) {
Point2d pt1 = pixel2cam(keypoints_1[m.queryIdx].pt, K);
Mat y1 = (Mat_<double>(3, 1) << pt1.x, pt1.y, 1);
Point2d pt2 = pixel2cam(keypoints_2[m.trainIdx].pt, K);
Mat y2 = (Mat_<double>(3, 1) << pt2.x, pt2.y, 1);
Mat d = y2.t() * t_x * R * y1;
cout << "epipolar constraint = " << d << endl;
}
return 0;
}
void find_feature_matches(const Mat &img_1, const Mat &img_2,
std::vector<KeyPoint> &keypoints_1,
std::vector<KeyPoint> &keypoints_2,
std::vector<DMatch> &matches) {
//-- 初始化
Mat descriptors_1, descriptors_2;
// used in OpenCV3
Ptr<FeatureDetector> detector = ORB::create();
Ptr<DescriptorExtractor> descriptor = ORB::create();
// use this if you are in OpenCV2
// Ptr<FeatureDetector> detector = FeatureDetector::create ( "ORB" );
// Ptr<DescriptorExtractor> descriptor = DescriptorExtractor::create ( "ORB" );
Ptr<DescriptorMatcher> matcher = DescriptorMatcher::create("BruteForce-Hamming");
//-- 第一步:检测 Oriented FAST 角点位置
detector->detect(img_1, keypoints_1);
detector->detect(img_2, keypoints_2);
//-- 第二步:根据角点位置计算 BRIEF 描述子
descriptor->compute(img_1, keypoints_1, descriptors_1);
descriptor->compute(img_2, keypoints_2, descriptors_2);
//-- 第三步:对两幅图像中的BRIEF描述子进行匹配,使用 Hamming 距离
vector<DMatch> match;
//BFMatcher matcher ( NORM_HAMMING );
matcher->match(descriptors_1, descriptors_2, match);
//-- 第四步:匹配点对筛选
double min_dist = 10000, max_dist = 0;
//找出所有匹配之间的最小距离和最大距离, 即是最相似的和最不相似的两组点之间的距离
for (int i = 0; i < descriptors_1.rows; i++) {
double dist = match[i].distance;
if (dist < min_dist) min_dist = dist;
if (dist > max_dist) max_dist = dist;
}
printf("-- Max dist : %f \n", max_dist);
printf("-- Min dist : %f \n", min_dist);
//当描述子之间的距离大于两倍的最小距离时,即认为匹配有误.但有时候最小距离会非常小,设置一个经验值30作为下限.
for (int i = 0; i < descriptors_1.rows; i++) {
if (match[i].distance <= max(2 * min_dist, 30.0)) {
matches.push_back(match[i]);
}
}
}
Point2d pixel2cam(const Point2d &p, const Mat &K) {
return Point2d
(
(p.x - K.at<double>(0, 2)) / K.at<double>(0, 0),
(p.y - K.at<double>(1, 2)) / K.at<double>(1, 1)
);
}
void pose_estimation_2d2d(std::vector<KeyPoint> keypoints_1,
std::vector<KeyPoint> keypoints_2,
std::vector<DMatch> matches,
Mat &R, Mat &t) {
// 相机内参,TUM Freiburg2
Mat K = (Mat_<double>(3, 3) << 520.9, 0, 325.1, 0, 521.0, 249.7, 0, 0, 1);
//-- 把匹配点转换为vector<Point2f>的形式
vector<Point2f> points1;
vector<Point2f> points2;
for (int i = 0; i < (int) matches.size(); i++) {
points1.push_back(keypoints_1[matches[i].queryIdx].pt);
points2.push_back(keypoints_2[matches[i].trainIdx].pt);
}
//-- 计算基础矩阵
Mat fundamental_matrix;
fundamental_matrix = findFundamentalMat(points1, points2, CV_FM_8POINT);
cout << "fundamental_matrix is " << endl << fundamental_matrix << endl;
//-- 计算本质矩阵
Point2d principal_point(325.1, 249.7); //相机光心, TUM dataset标定值
double focal_length = 521; //相机焦距, TUM dataset标定值
Mat essential_matrix;
essential_matrix = findEssentialMat(points1, points2, focal_length, principal_point);
cout << "essential_matrix is " << endl << essential_matrix << endl;
//-- 计算单应矩阵
//-- 但是本例中场景不是平面,单应矩阵意义不大
Mat homography_matrix;
homography_matrix = findHomography(points1, points2, RANSAC, 3);
cout << "homography_matrix is " << endl << homography_matrix << endl;
//-- 从本质矩阵中恢复旋转和平移信息.
// 此函数仅在Opencv3中提供
recoverPose(essential_matrix, points1, points2, R, t, focal_length, principal_point);
cout << "R is " << endl << R << endl;
cout << "t is " << endl << t << endl;
}
#include <iostream> #include <opencv2/core/core.hpp> #include <opencv2/features2d/features2d.hpp> #include <opencv2/highgui/highgui.hpp> #include <opencv2/calib3d/calib3d.hpp> // #include "extra.h" // use this if in OpenCV2 using namespace std; using namespace cv; /**************************************************** * 本程序演示了如何使用2D-2D的特征匹配估计相机运动 * **************************************************/ void find_feature_matches( const Mat &img_1, const Mat &img_2, std::vector<KeyPoint> &keypoints_1, std::vector<KeyPoint> &keypoints_2, std::vector<DMatch> &matches); void pose_estimation_2d2d( std::vector<KeyPoint> keypoints_1, std::vector<KeyPoint> keypoints_2, std::vector<DMatch> matches, Mat &R, Mat &t); // 像素坐标转相机归一化坐标 Point2d pixel2cam(const Point2d &p, const Mat &K); int main(int argc, char **argv) { if (argc != 3) { cout << "usage: pose_estimation_2d2d img1 img2" << endl; return 1; } //-- 读取图像 Mat img_1 = imread(argv[1], CV_LOAD_IMAGE_COLOR); Mat img_2 = imread(argv[2], CV_LOAD_IMAGE_COLOR); assert(img_1.data && img_2.data && "Can not load images!"); vector<KeyPoint> keypoints_1, keypoints_2; vector<DMatch> matches; find_feature_matches(img_1, img_2, keypoints_1, keypoints_2, matches); cout << "一共找到了" << matches.size() << "组匹配点" << endl; //-- 估计两张图像间运动 Mat R, t; pose_estimation_2d2d(keypoints_1, keypoints_2, matches, R, t); //-- 验证E=t^R*scale Mat t_x = (Mat_<double>(3, 3) << 0, -t.at<double>(2, 0), t.at<double>(1, 0), t.at<double>(2, 0), 0, -t.at<double>(0, 0), -t.at<double>(1, 0), t.at<double>(0, 0), 0); cout << "t^R=" << endl << t_x * R << endl; //-- 验证对极约束 Mat K = (Mat_<double>(3, 3) << 520.9, 0, 325.1, 0, 521.0, 249.7, 0, 0, 1); for (DMatch m: matches) { Point2d pt1 = pixel2cam(keypoints_1[m.queryIdx].pt, K); Mat y1 = (Mat_<double>(3, 1) << pt1.x, pt1.y, 1); Point2d pt2 = pixel2cam(keypoints_2[m.trainIdx].pt, K); Mat y2 = (Mat_<double>(3, 1) << pt2.x, pt2.y, 1); Mat d = y2.t() * t_x * R * y1; cout << "epipolar constraint = " << d << endl; } return 0; } void find_feature_matches(const Mat &img_1, const Mat &img_2, std::vector<KeyPoint> &keypoints_1, std::vector<KeyPoint> &keypoints_2, std::vector<DMatch> &matches) { //-- 初始化 Mat descriptors_1, descriptors_2; // used in OpenCV3 Ptr<FeatureDetector> detector = ORB::create(); Ptr<DescriptorExtractor> descriptor = ORB::create(); // use this if you are in OpenCV2 // Ptr<FeatureDetector> detector = FeatureDetector::create ( "ORB" ); // Ptr<DescriptorExtractor> descriptor = DescriptorExtractor::create ( "ORB" ); Ptr<DescriptorMatcher> matcher = DescriptorMatcher::create("BruteForce-Hamming"); //-- 第一步:检测 Oriented FAST 角点位置 detector->detect(img_1, keypoints_1); detector->detect(img_2, keypoints_2); //-- 第二步:根据角点位置计算 BRIEF 描述子 descriptor->compute(img_1, keypoints_1, descriptors_1); descriptor->compute(img_2, keypoints_2, descriptors_2); //-- 第三步:对两幅图像中的BRIEF描述子进行匹配,使用 Hamming 距离 vector<DMatch> match; //BFMatcher matcher ( NORM_HAMMING ); matcher->match(descriptors_1, descriptors_2, match); //-- 第四步:匹配点对筛选 double min_dist = 10000, max_dist = 0; //找出所有匹配之间的最小距离和最大距离, 即是最相似的和最不相似的两组点之间的距离 for (int i = 0; i < descriptors_1.rows; i++) { double dist = match[i].distance; if (dist < min_dist) min_dist = dist; if (dist > max_dist) max_dist = dist; } printf("-- Max dist : %f \n", max_dist); printf("-- Min dist : %f \n", min_dist); //当描述子之间的距离大于两倍的最小距离时,即认为匹配有误.但有时候最小距离会非常小,设置一个经验值30作为下限. for (int i = 0; i < descriptors_1.rows; i++) { if (match[i].distance <= max(2 * min_dist, 30.0)) { matches.push_back(match[i]); } } } Point2d pixel2cam(const Point2d &p, const Mat &K) { return Point2d ( (p.x - K.at<double>(0, 2)) / K.at<double>(0, 0), (p.y - K.at<double>(1, 2)) / K.at<double>(1, 1) ); } void pose_estimation_2d2d(std::vector<KeyPoint> keypoints_1, std::vector<KeyPoint> keypoints_2, std::vector<DMatch> matches, Mat &R, Mat &t) { // 相机内参,TUM Freiburg2 Mat K = (Mat_<double>(3, 3) << 520.9, 0, 325.1, 0, 521.0, 249.7, 0, 0, 1); //-- 把匹配点转换为vector<Point2f>的形式 vector<Point2f> points1; vector<Point2f> points2; for (int i = 0; i < (int) matches.size(); i++) { points1.push_back(keypoints_1[matches[i].queryIdx].pt); points2.push_back(keypoints_2[matches[i].trainIdx].pt); } //-- 计算基础矩阵 Mat fundamental_matrix; fundamental_matrix = findFundamentalMat(points1, points2, CV_FM_8POINT); cout << "fundamental_matrix is " << endl << fundamental_matrix << endl; //-- 计算本质矩阵 Point2d principal_point(325.1, 249.7); //相机光心, TUM dataset标定值 double focal_length = 521; //相机焦距, TUM dataset标定值 Mat essential_matrix; essential_matrix = findEssentialMat(points1, points2, focal_length, principal_point); cout << "essential_matrix is " << endl << essential_matrix << endl; //-- 计算单应矩阵 //-- 但是本例中场景不是平面,单应矩阵意义不大 Mat homography_matrix; homography_matrix = findHomography(points1, points2, RANSAC, 3); cout << "homography_matrix is " << endl << homography_matrix << endl; //-- 从本质矩阵中恢复旋转和平移信息. // 此函数仅在Opencv3中提供 recoverPose(essential_matrix, points1, points2, R, t, focal_length, principal_point); cout << "R is " << endl << R << endl; cout << "t is " << endl << t << endl; }
#include <iostream> #include <opencv2/core/core.hpp> #include <opencv2/features2d/features2d.hpp> #include <opencv2/highgui/highgui.hpp> #include <opencv2/calib3d/calib3d.hpp> // #include "extra.h" // use this if in OpenCV2 using namespace std; using namespace cv; /**************************************************** * 本程序演示了如何使用2D-2D的特征匹配估计相机运动 * **************************************************/ void find_feature_matches( const Mat &img_1, const Mat &img_2, std::vector<KeyPoint> &keypoints_1, std::vector<KeyPoint> &keypoints_2, std::vector<DMatch> &matches); void pose_estimation_2d2d( std::vector<KeyPoint> keypoints_1, std::vector<KeyPoint> keypoints_2, std::vector<DMatch> matches, Mat &R, Mat &t); // 像素坐标转相机归一化坐标 Point2d pixel2cam(const Point2d &p, const Mat &K); int main(int argc, char **argv) { if (argc != 3) { cout << "usage: pose_estimation_2d2d img1 img2" << endl; return 1; } //-- 读取图像 Mat img_1 = imread(argv[1], CV_LOAD_IMAGE_COLOR); Mat img_2 = imread(argv[2], CV_LOAD_IMAGE_COLOR); assert(img_1.data && img_2.data && "Can not load images!"); vector<KeyPoint> keypoints_1, keypoints_2; vector<DMatch> matches; find_feature_matches(img_1, img_2, keypoints_1, keypoints_2, matches); cout << "一共找到了" << matches.size() << "组匹配点" << endl; //-- 估计两张图像间运动 Mat R, t; pose_estimation_2d2d(keypoints_1, keypoints_2, matches, R, t); //-- 验证E=t^R*scale Mat t_x = (Mat_<double>(3, 3) << 0, -t.at<double>(2, 0), t.at<double>(1, 0), t.at<double>(2, 0), 0, -t.at<double>(0, 0), -t.at<double>(1, 0), t.at<double>(0, 0), 0); cout << "t^R=" << endl << t_x * R << endl; //-- 验证对极约束 Mat K = (Mat_<double>(3, 3) << 520.9, 0, 325.1, 0, 521.0, 249.7, 0, 0, 1); for (DMatch m: matches) { Point2d pt1 = pixel2cam(keypoints_1[m.queryIdx].pt, K); Mat y1 = (Mat_<double>(3, 1) << pt1.x, pt1.y, 1); Point2d pt2 = pixel2cam(keypoints_2[m.trainIdx].pt, K); Mat y2 = (Mat_<double>(3, 1) << pt2.x, pt2.y, 1); Mat d = y2.t() * t_x * R * y1; cout << "epipolar constraint = " << d << endl; } return 0; } void find_feature_matches(const Mat &img_1, const Mat &img_2, std::vector<KeyPoint> &keypoints_1, std::vector<KeyPoint> &keypoints_2, std::vector<DMatch> &matches) { //-- 初始化 Mat descriptors_1, descriptors_2; // used in OpenCV3 Ptr<FeatureDetector> detector = ORB::create(); Ptr<DescriptorExtractor> descriptor = ORB::create(); // use this if you are in OpenCV2 // Ptr<FeatureDetector> detector = FeatureDetector::create ( "ORB" ); // Ptr<DescriptorExtractor> descriptor = DescriptorExtractor::create ( "ORB" ); Ptr<DescriptorMatcher> matcher = DescriptorMatcher::create("BruteForce-Hamming"); //-- 第一步:检测 Oriented FAST 角点位置 detector->detect(img_1, keypoints_1); detector->detect(img_2, keypoints_2); //-- 第二步:根据角点位置计算 BRIEF 描述子 descriptor->compute(img_1, keypoints_1, descriptors_1); descriptor->compute(img_2, keypoints_2, descriptors_2); //-- 第三步:对两幅图像中的BRIEF描述子进行匹配,使用 Hamming 距离 vector<DMatch> match; //BFMatcher matcher ( NORM_HAMMING ); matcher->match(descriptors_1, descriptors_2, match); //-- 第四步:匹配点对筛选 double min_dist = 10000, max_dist = 0; //找出所有匹配之间的最小距离和最大距离, 即是最相似的和最不相似的两组点之间的距离 for (int i = 0; i < descriptors_1.rows; i++) { double dist = match[i].distance; if (dist < min_dist) min_dist = dist; if (dist > max_dist) max_dist = dist; } printf("-- Max dist : %f \n", max_dist); printf("-- Min dist : %f \n", min_dist); //当描述子之间的距离大于两倍的最小距离时,即认为匹配有误.但有时候最小距离会非常小,设置一个经验值30作为下限. for (int i = 0; i < descriptors_1.rows; i++) { if (match[i].distance <= max(2 * min_dist, 30.0)) { matches.push_back(match[i]); } } } Point2d pixel2cam(const Point2d &p, const Mat &K) { return Point2d ( (p.x - K.at<double>(0, 2)) / K.at<double>(0, 0), (p.y - K.at<double>(1, 2)) / K.at<double>(1, 1) ); } void pose_estimation_2d2d(std::vector<KeyPoint> keypoints_1, std::vector<KeyPoint> keypoints_2, std::vector<DMatch> matches, Mat &R, Mat &t) { // 相机内参,TUM Freiburg2 Mat K = (Mat_<double>(3, 3) << 520.9, 0, 325.1, 0, 521.0, 249.7, 0, 0, 1); //-- 把匹配点转换为vector<Point2f>的形式 vector<Point2f> points1; vector<Point2f> points2; for (int i = 0; i < (int) matches.size(); i++) { points1.push_back(keypoints_1[matches[i].queryIdx].pt); points2.push_back(keypoints_2[matches[i].trainIdx].pt); } //-- 计算基础矩阵 Mat fundamental_matrix; fundamental_matrix = findFundamentalMat(points1, points2, CV_FM_8POINT); cout << "fundamental_matrix is " << endl << fundamental_matrix << endl; //-- 计算本质矩阵 Point2d principal_point(325.1, 249.7); //相机光心, TUM dataset标定值 double focal_length = 521; //相机焦距, TUM dataset标定值 Mat essential_matrix; essential_matrix = findEssentialMat(points1, points2, focal_length, principal_point); cout << "essential_matrix is " << endl << essential_matrix << endl; //-- 计算单应矩阵 //-- 但是本例中场景不是平面,单应矩阵意义不大 Mat homography_matrix; homography_matrix = findHomography(points1, points2, RANSAC, 3); cout << "homography_matrix is " << endl << homography_matrix << endl; //-- 从本质矩阵中恢复旋转和平移信息. // 此函数仅在Opencv3中提供 recoverPose(essential_matrix, points1, points2, R, t, focal_length, principal_point); cout << "R is " << endl << R << endl; cout << "t is " << endl << t << endl; }
复制
#include <iostream> #include <opencv2/core/core.hpp> #include <opencv2/features2d/features2d.hpp> #include <opencv2/highgui/highgui.hpp> #include <opencv2/calib3d/calib3d.hpp> // #include "extra.h" // use this if in OpenCV2 using namespace std; using namespace cv; /**************************************************** * 本程序演示了如何使用2D-2D的特征匹配估计相机运动 * **************************************************/ void find_feature_matches( const Mat &img_1, const Mat &img_2, std::vector<KeyPoint> &keypoints_1, std::vector<KeyPoint> &keypoints_2, std::vector<DMatch> &matches); void pose_estimation_2d2d( std::vector<KeyPoint> keypoints_1, std::vector<KeyPoint> keypoints_2, std::vector<DMatch> matches, Mat &R, Mat &t); // 像素坐标转相机归一化坐标 Point2d pixel2cam(const Point2d &p, const Mat &K); int main(int argc, char **argv) { if (argc != 3) { cout << "usage: pose_estimation_2d2d img1 img2" << endl; return 1; } //-- 读取图像 Mat img_1 = imread(argv[1], CV_LOAD_IMAGE_COLOR); Mat img_2 = imread(argv[2], CV_LOAD_IMAGE_COLOR); assert(img_1.data && img_2.data && "Can not load images!"); vector<KeyPoint> keypoints_1, keypoints_2; vector<DMatch> matches; find_feature_matches(img_1, img_2, keypoints_1, keypoints_2, matches); cout << "一共找到了" << matches.size() << "组匹配点" << endl; //-- 估计两张图像间运动 Mat R, t; pose_estimation_2d2d(keypoints_1, keypoints_2, matches, R, t); //-- 验证E=t^R*scale Mat t_x = (Mat_<double>(3, 3) << 0, -t.at<double>(2, 0), t.at<double>(1, 0), t.at<double>(2, 0), 0, -t.at<double>(0, 0), -t.at<double>(1, 0), t.at<double>(0, 0), 0); cout << "t^R=" << endl << t_x * R << endl; //-- 验证对极约束 Mat K = (Mat_<double>(3, 3) << 520.9, 0, 325.1, 0, 521.0, 249.7, 0, 0, 1); for (DMatch m: matches) { Point2d pt1 = pixel2cam(keypoints_1[m.queryIdx].pt, K); Mat y1 = (Mat_<double>(3, 1) << pt1.x, pt1.y, 1); Point2d pt2 = pixel2cam(keypoints_2[m.trainIdx].pt, K); Mat y2 = (Mat_<double>(3, 1) << pt2.x, pt2.y, 1); Mat d = y2.t() * t_x * R * y1; cout << "epipolar constraint = " << d << endl; } return 0; } void find_feature_matches(const Mat &img_1, const Mat &img_2, std::vector<KeyPoint> &keypoints_1, std::vector<KeyPoint> &keypoints_2, std::vector<DMatch> &matches) { //-- 初始化 Mat descriptors_1, descriptors_2; // used in OpenCV3 Ptr<FeatureDetector> detector = ORB::create(); Ptr<DescriptorExtractor> descriptor = ORB::create(); // use this if you are in OpenCV2 // Ptr<FeatureDetector> detector = FeatureDetector::create ( "ORB" ); // Ptr<DescriptorExtractor> descriptor = DescriptorExtractor::create ( "ORB" ); Ptr<DescriptorMatcher> matcher = DescriptorMatcher::create("BruteForce-Hamming"); //-- 第一步:检测 Oriented FAST 角点位置 detector->detect(img_1, keypoints_1); detector->detect(img_2, keypoints_2); //-- 第二步:根据角点位置计算 BRIEF 描述子 descriptor->compute(img_1, keypoints_1, descriptors_1); descriptor->compute(img_2, keypoints_2, descriptors_2); //-- 第三步:对两幅图像中的BRIEF描述子进行匹配,使用 Hamming 距离 vector<DMatch> match; //BFMatcher matcher ( NORM_HAMMING ); matcher->match(descriptors_1, descriptors_2, match); //-- 第四步:匹配点对筛选 double min_dist = 10000, max_dist = 0; //找出所有匹配之间的最小距离和最大距离, 即是最相似的和最不相似的两组点之间的距离 for (int i = 0; i < descriptors_1.rows; i++) { double dist = match[i].distance; if (dist < min_dist) min_dist = dist; if (dist > max_dist) max_dist = dist; } printf("-- Max dist : %f \n", max_dist); printf("-- Min dist : %f \n", min_dist); //当描述子之间的距离大于两倍的最小距离时,即认为匹配有误.但有时候最小距离会非常小,设置一个经验值30作为下限. for (int i = 0; i < descriptors_1.rows; i++) { if (match[i].distance <= max(2 * min_dist, 30.0)) { matches.push_back(match[i]); } } } Point2d pixel2cam(const Point2d &p, const Mat &K) { return Point2d ( (p.x - K.at<double>(0, 2)) / K.at<double>(0, 0), (p.y - K.at<double>(1, 2)) / K.at<double>(1, 1) ); } void pose_estimation_2d2d(std::vector<KeyPoint> keypoints_1, std::vector<KeyPoint> keypoints_2, std::vector<DMatch> matches, Mat &R, Mat &t) { // 相机内参,TUM Freiburg2 Mat K = (Mat_<double>(3, 3) << 520.9, 0, 325.1, 0, 521.0, 249.7, 0, 0, 1); //-- 把匹配点转换为vector<Point2f>的形式 vector<Point2f> points1; vector<Point2f> points2; for (int i = 0; i < (int) matches.size(); i++) { points1.push_back(keypoints_1[matches[i].queryIdx].pt); points2.push_back(keypoints_2[matches[i].trainIdx].pt); } //-- 计算基础矩阵 Mat fundamental_matrix; fundamental_matrix = findFundamentalMat(points1, points2, CV_FM_8POINT); cout << "fundamental_matrix is " << endl << fundamental_matrix << endl; //-- 计算本质矩阵 Point2d principal_point(325.1, 249.7); //相机光心, TUM dataset标定值 double focal_length = 521; //相机焦距, TUM dataset标定值 Mat essential_matrix; essential_matrix = findEssentialMat(points1, points2, focal_length, principal_point); cout << "essential_matrix is " << endl << essential_matrix << endl; //-- 计算单应矩阵 //-- 但是本例中场景不是平面,单应矩阵意义不大 Mat homography_matrix; homography_matrix = findHomography(points1, points2, RANSAC, 3); cout << "homography_matrix is " << endl << homography_matrix << endl; //-- 从本质矩阵中恢复旋转和平移信息. // 此函数仅在Opencv3中提供 recoverPose(essential_matrix, points1, points2, R, t, focal_length, principal_point); cout << "R is " << endl << R << endl; cout << "t is " << endl << t << endl; }
复制
复制
复制
7.5 三角测量
编译运行代码结果如下:部分类的调用没能明白,轻置小坑)
部分类的调用没能明白,轻置小坑
#include <iostream>
#include <opencv2/opencv.hpp>
// #include "extra.h" // used in opencv2
using namespace std;
using namespace cv;
void find_feature_matches(
const Mat &img_1, const Mat &img_2,
std::vector<KeyPoint> &keypoints_1,
std::vector<KeyPoint> &keypoints_2,
std::vector<DMatch> &matches);
void pose_estimation_2d2d(
const std::vector<KeyPoint> &keypoints_1,
const std::vector<KeyPoint> &keypoints_2,
const std::vector<DMatch> &matches,
Mat &R, Mat &t);
void triangulation(
const vector<KeyPoint> &keypoint_1,
const vector<KeyPoint> &keypoint_2,
const std::vector<DMatch> &matches,
const Mat &R, const Mat &t,
vector<Point3d> &points
);
/// 作图用
inline cv::Scalar get_color(float depth) {
float up_th = 50, low_th = 10, th_range = up_th - low_th;
if (depth > up_th) depth = up_th;
if (depth < low_th) depth = low_th;
return cv::Scalar(255 * depth / th_range, 0, 255 * (1 - depth / th_range));
}
// 像素坐标转相机归一化坐标
Point2f pixel2cam(const Point2d &p, const Mat &K);
int main(int argc, char **argv) {
if (argc != 3) {
cout << "usage: triangulation img1 img2" << endl;
return 1;
}
//-- 读取图像
Mat img_1 = imread(argv[1], CV_LOAD_IMAGE_COLOR);
Mat img_2 = imread(argv[2], CV_LOAD_IMAGE_COLOR);
vector<KeyPoint> keypoints_1, keypoints_2;
vector<DMatch> matches;
find_feature_matches(img_1, img_2, keypoints_1, keypoints_2, matches);
cout << "一共找到了" << matches.size() << "组匹配点" << endl;
//-- 估计两张图像间运动
Mat R, t;
pose_estimation_2d2d(keypoints_1, keypoints_2, matches, R, t);
//-- 三角化
vector<Point3d> points;
triangulation(keypoints_1, keypoints_2, matches, R, t, points);
//-- 验证三角化点与特征点的重投影关系
Mat K = (Mat_<double>(3, 3) << 520.9, 0, 325.1, 0, 521.0, 249.7, 0, 0, 1);
Mat img1_plot = img_1.clone();
Mat img2_plot = img_2.clone();
for (int i = 0; i < matches.size(); i++) {
// 第一个图
float depth1 = points[i].z;
cout << "depth: " << depth1 << endl;
Point2d pt1_cam = pixel2cam(keypoints_1[matches[i].queryIdx].pt, K);
cv::circle(img1_plot, keypoints_1[matches[i].queryIdx].pt, 2, get_color(depth1), 2);
// 第二个图
Mat pt2_trans = R * (Mat_<double>(3, 1) << points[i].x, points[i].y, points[i].z) + t;
float depth2 = pt2_trans.at<double>(2, 0);
cv::circle(img2_plot, keypoints_2[matches[i].trainIdx].pt, 2, get_color(depth2), 2);
}
cv::imshow("img 1", img1_plot);
cv::imshow("img 2", img2_plot);
cv::waitKey();
return 0;
}
void find_feature_matches(const Mat &img_1, const Mat &img_2,
std::vector<KeyPoint> &keypoints_1,
std::vector<KeyPoint> &keypoints_2,
std::vector<DMatch> &matches) {
//-- 初始化
Mat descriptors_1, descriptors_2;
// used in OpenCV3
Ptr<FeatureDetector> detector = ORB::create();
Ptr<DescriptorExtractor> descriptor = ORB::create();
// use this if you are in OpenCV2
// Ptr<FeatureDetector> detector = FeatureDetector::create ( "ORB" );
// Ptr<DescriptorExtractor> descriptor = DescriptorExtractor::create ( "ORB" );
Ptr<DescriptorMatcher> matcher = DescriptorMatcher::create("BruteForce-Hamming");
//-- 第一步:检测 Oriented FAST 角点位置
detector->detect(img_1, keypoints_1);
detector->detect(img_2, keypoints_2);
//-- 第二步:根据角点位置计算 BRIEF 描述子
descriptor->compute(img_1, keypoints_1, descriptors_1);
descriptor->compute(img_2, keypoints_2, descriptors_2);
//-- 第三步:对两幅图像中的BRIEF描述子进行匹配,使用 Hamming 距离
vector<DMatch> match;
// BFMatcher matcher ( NORM_HAMMING );
matcher->match(descriptors_1, descriptors_2, match);
//-- 第四步:匹配点对筛选
double min_dist = 10000, max_dist = 0;
//找出所有匹配之间的最小距离和最大距离, 即是最相似的和最不相似的两组点之间的距离
for (int i = 0; i < descriptors_1.rows; i++) {
double dist = match[i].distance;
if (dist < min_dist) min_dist = dist;
if (dist > max_dist) max_dist = dist;
}
printf("-- Max dist : %f \n", max_dist);
printf("-- Min dist : %f \n", min_dist);
//当描述子之间的距离大于两倍的最小距离时,即认为匹配有误.但有时候最小距离会非常小,设置一个经验值30作为下限.
for (int i = 0; i < descriptors_1.rows; i++) {
if (match[i].distance <= max(2 * min_dist, 30.0)) {
matches.push_back(match[i]);
}
}
}
void pose_estimation_2d2d(
const std::vector<KeyPoint> &keypoints_1,
const std::vector<KeyPoint> &keypoints_2,
const std::vector<DMatch> &matches,
Mat &R, Mat &t) {
// 相机内参,TUM Freiburg2
Mat K = (Mat_<double>(3, 3) << 520.9, 0, 325.1, 0, 521.0, 249.7, 0, 0, 1);
//-- 把匹配点转换为vector<Point2f>的形式
vector<Point2f> points1;
vector<Point2f> points2;
for (int i = 0; i < (int) matches.size(); i++) {
points1.push_back(keypoints_1[matches[i].queryIdx].pt);
points2.push_back(keypoints_2[matches[i].trainIdx].pt);
}
//-- 计算本质矩阵
Point2d principal_point(325.1, 249.7); //相机主点, TUM dataset标定值
int focal_length = 521; //相机焦距, TUM dataset标定值
Mat essential_matrix;
essential_matrix = findEssentialMat(points1, points2, focal_length, principal_point);
//-- 从本质矩阵中恢复旋转和平移信息.
recoverPose(essential_matrix, points1, points2, R, t, focal_length, principal_point);
}
void triangulation( //通过三角化利用对极几何求解的相机位姿求出特征点的空间位置
const vector<KeyPoint> &keypoint_1,
const vector<KeyPoint> &keypoint_2,
const std::vector<DMatch> &matches,
const Mat &R, const Mat &t,
vector<Point3d> &points) {
Mat T1 = (Mat_<float>(3, 4) <<
1, 0, 0, 0,
0, 1, 0, 0,
0, 0, 1, 0);
Mat T2 = (Mat_<float>(3, 4) <<
R.at<double>(0, 0), R.at<double>(0, 1), R.at<double>(0, 2), t.at<double>(0, 0),
R.at<double>(1, 0), R.at<double>(1, 1), R.at<double>(1, 2), t.at<double>(1, 0),
R.at<double>(2, 0), R.at<double>(2, 1), R.at<double>(2, 2), t.at<double>(2, 0)
);
Mat K = (Mat_<double>(3, 3) << 520.9, 0, 325.1, 0, 521.0, 249.7, 0, 0, 1);
vector<Point2f> pts_1, pts_2;
for (DMatch m:matches) {
// 将像素坐标转换至相机坐标
pts_1.push_back(pixel2cam(keypoint_1[m.queryIdx].pt, K));
pts_2.push_back(pixel2cam(keypoint_2[m.trainIdx].pt, K));
}
Mat pts_4d;
cv::triangulatePoints(T1, T2, pts_1, pts_2, pts_4d);
// 转换成非齐次坐标
for (int i = 0; i < pts_4d.cols; i++) {
Mat x = pts_4d.col(i);
x /= x.at<float>(3, 0); // 归一化
Point3d p(
x.at<float>(0, 0),
x.at<float>(1, 0),
x.at<float>(2, 0)
);
points.push_back(p);
}
}
Point2f pixel2cam(const Point2d &p, const Mat &K) {
return Point2f
(
(p.x - K.at<double>(0, 2)) / K.at<double>(0, 0),
(p.y - K.at<double>(1, 2)) / K.at<double>(1, 1)
);
}
#include <iostream> #include <opencv2/opencv.hpp> // #include "extra.h" // used in opencv2 using namespace std; using namespace cv; void find_feature_matches( const Mat &img_1, const Mat &img_2, std::vector<KeyPoint> &keypoints_1, std::vector<KeyPoint> &keypoints_2, std::vector<DMatch> &matches); void pose_estimation_2d2d( const std::vector<KeyPoint> &keypoints_1, const std::vector<KeyPoint> &keypoints_2, const std::vector<DMatch> &matches, Mat &R, Mat &t); void triangulation( const vector<KeyPoint> &keypoint_1, const vector<KeyPoint> &keypoint_2, const std::vector<DMatch> &matches, const Mat &R, const Mat &t, vector<Point3d> &points ); /// 作图用 inline cv::Scalar get_color(float depth) { float up_th = 50, low_th = 10, th_range = up_th - low_th; if (depth > up_th) depth = up_th; if (depth < low_th) depth = low_th; return cv::Scalar(255 * depth / th_range, 0, 255 * (1 - depth / th_range)); } // 像素坐标转相机归一化坐标 Point2f pixel2cam(const Point2d &p, const Mat &K); int main(int argc, char **argv) { if (argc != 3) { cout << "usage: triangulation img1 img2" << endl; return 1; } //-- 读取图像 Mat img_1 = imread(argv[1], CV_LOAD_IMAGE_COLOR); Mat img_2 = imread(argv[2], CV_LOAD_IMAGE_COLOR); vector<KeyPoint> keypoints_1, keypoints_2; vector<DMatch> matches; find_feature_matches(img_1, img_2, keypoints_1, keypoints_2, matches); cout << "一共找到了" << matches.size() << "组匹配点" << endl; //-- 估计两张图像间运动 Mat R, t; pose_estimation_2d2d(keypoints_1, keypoints_2, matches, R, t); //-- 三角化 vector<Point3d> points; triangulation(keypoints_1, keypoints_2, matches, R, t, points); //-- 验证三角化点与特征点的重投影关系 Mat K = (Mat_<double>(3, 3) << 520.9, 0, 325.1, 0, 521.0, 249.7, 0, 0, 1); Mat img1_plot = img_1.clone(); Mat img2_plot = img_2.clone(); for (int i = 0; i < matches.size(); i++) { // 第一个图 float depth1 = points[i].z; cout << "depth: " << depth1 << endl; Point2d pt1_cam = pixel2cam(keypoints_1[matches[i].queryIdx].pt, K); cv::circle(img1_plot, keypoints_1[matches[i].queryIdx].pt, 2, get_color(depth1), 2); // 第二个图 Mat pt2_trans = R * (Mat_<double>(3, 1) << points[i].x, points[i].y, points[i].z) + t; float depth2 = pt2_trans.at<double>(2, 0); cv::circle(img2_plot, keypoints_2[matches[i].trainIdx].pt, 2, get_color(depth2), 2); } cv::imshow("img 1", img1_plot); cv::imshow("img 2", img2_plot); cv::waitKey(); return 0; } void find_feature_matches(const Mat &img_1, const Mat &img_2, std::vector<KeyPoint> &keypoints_1, std::vector<KeyPoint> &keypoints_2, std::vector<DMatch> &matches) { //-- 初始化 Mat descriptors_1, descriptors_2; // used in OpenCV3 Ptr<FeatureDetector> detector = ORB::create(); Ptr<DescriptorExtractor> descriptor = ORB::create(); // use this if you are in OpenCV2 // Ptr<FeatureDetector> detector = FeatureDetector::create ( "ORB" ); // Ptr<DescriptorExtractor> descriptor = DescriptorExtractor::create ( "ORB" ); Ptr<DescriptorMatcher> matcher = DescriptorMatcher::create("BruteForce-Hamming"); //-- 第一步:检测 Oriented FAST 角点位置 detector->detect(img_1, keypoints_1); detector->detect(img_2, keypoints_2); //-- 第二步:根据角点位置计算 BRIEF 描述子 descriptor->compute(img_1, keypoints_1, descriptors_1); descriptor->compute(img_2, keypoints_2, descriptors_2); //-- 第三步:对两幅图像中的BRIEF描述子进行匹配,使用 Hamming 距离 vector<DMatch> match; // BFMatcher matcher ( NORM_HAMMING ); matcher->match(descriptors_1, descriptors_2, match); //-- 第四步:匹配点对筛选 double min_dist = 10000, max_dist = 0; //找出所有匹配之间的最小距离和最大距离, 即是最相似的和最不相似的两组点之间的距离 for (int i = 0; i < descriptors_1.rows; i++) { double dist = match[i].distance; if (dist < min_dist) min_dist = dist; if (dist > max_dist) max_dist = dist; } printf("-- Max dist : %f \n", max_dist); printf("-- Min dist : %f \n", min_dist); //当描述子之间的距离大于两倍的最小距离时,即认为匹配有误.但有时候最小距离会非常小,设置一个经验值30作为下限. for (int i = 0; i < descriptors_1.rows; i++) { if (match[i].distance <= max(2 * min_dist, 30.0)) { matches.push_back(match[i]); } } } void pose_estimation_2d2d( const std::vector<KeyPoint> &keypoints_1, const std::vector<KeyPoint> &keypoints_2, const std::vector<DMatch> &matches, Mat &R, Mat &t) { // 相机内参,TUM Freiburg2 Mat K = (Mat_<double>(3, 3) << 520.9, 0, 325.1, 0, 521.0, 249.7, 0, 0, 1); //-- 把匹配点转换为vector<Point2f>的形式 vector<Point2f> points1; vector<Point2f> points2; for (int i = 0; i < (int) matches.size(); i++) { points1.push_back(keypoints_1[matches[i].queryIdx].pt); points2.push_back(keypoints_2[matches[i].trainIdx].pt); } //-- 计算本质矩阵 Point2d principal_point(325.1, 249.7); //相机主点, TUM dataset标定值 int focal_length = 521; //相机焦距, TUM dataset标定值 Mat essential_matrix; essential_matrix = findEssentialMat(points1, points2, focal_length, principal_point); //-- 从本质矩阵中恢复旋转和平移信息. recoverPose(essential_matrix, points1, points2, R, t, focal_length, principal_point); } void triangulation( //通过三角化利用对极几何求解的相机位姿求出特征点的空间位置 const vector<KeyPoint> &keypoint_1, const vector<KeyPoint> &keypoint_2, const std::vector<DMatch> &matches, const Mat &R, const Mat &t, vector<Point3d> &points) { Mat T1 = (Mat_<float>(3, 4) << 1, 0, 0, 0, 0, 1, 0, 0, 0, 0, 1, 0); Mat T2 = (Mat_<float>(3, 4) << R.at<double>(0, 0), R.at<double>(0, 1), R.at<double>(0, 2), t.at<double>(0, 0), R.at<double>(1, 0), R.at<double>(1, 1), R.at<double>(1, 2), t.at<double>(1, 0), R.at<double>(2, 0), R.at<double>(2, 1), R.at<double>(2, 2), t.at<double>(2, 0) ); Mat K = (Mat_<double>(3, 3) << 520.9, 0, 325.1, 0, 521.0, 249.7, 0, 0, 1); vector<Point2f> pts_1, pts_2; for (DMatch m:matches) { // 将像素坐标转换至相机坐标 pts_1.push_back(pixel2cam(keypoint_1[m.queryIdx].pt, K)); pts_2.push_back(pixel2cam(keypoint_2[m.trainIdx].pt, K)); } Mat pts_4d; cv::triangulatePoints(T1, T2, pts_1, pts_2, pts_4d); // 转换成非齐次坐标 for (int i = 0; i < pts_4d.cols; i++) { Mat x = pts_4d.col(i); x /= x.at<float>(3, 0); // 归一化 Point3d p( x.at<float>(0, 0), x.at<float>(1, 0), x.at<float>(2, 0) ); points.push_back(p); } } Point2f pixel2cam(const Point2d &p, const Mat &K) { return Point2f ( (p.x - K.at<double>(0, 2)) / K.at<double>(0, 0), (p.y - K.at<double>(1, 2)) / K.at<double>(1, 1) ); }
#include <iostream> #include <opencv2/opencv.hpp> // #include "extra.h" // used in opencv2 using namespace std; using namespace cv; void find_feature_matches( const Mat &img_1, const Mat &img_2, std::vector<KeyPoint> &keypoints_1, std::vector<KeyPoint> &keypoints_2, std::vector<DMatch> &matches); void pose_estimation_2d2d( const std::vector<KeyPoint> &keypoints_1, const std::vector<KeyPoint> &keypoints_2, const std::vector<DMatch> &matches, Mat &R, Mat &t); void triangulation( const vector<KeyPoint> &keypoint_1, const vector<KeyPoint> &keypoint_2, const std::vector<DMatch> &matches, const Mat &R, const Mat &t, vector<Point3d> &points ); /// 作图用 inline cv::Scalar get_color(float depth) { float up_th = 50, low_th = 10, th_range = up_th - low_th; if (depth > up_th) depth = up_th; if (depth < low_th) depth = low_th; return cv::Scalar(255 * depth / th_range, 0, 255 * (1 - depth / th_range)); } // 像素坐标转相机归一化坐标 Point2f pixel2cam(const Point2d &p, const Mat &K); int main(int argc, char **argv) { if (argc != 3) { cout << "usage: triangulation img1 img2" << endl; return 1; } //-- 读取图像 Mat img_1 = imread(argv[1], CV_LOAD_IMAGE_COLOR); Mat img_2 = imread(argv[2], CV_LOAD_IMAGE_COLOR); vector<KeyPoint> keypoints_1, keypoints_2; vector<DMatch> matches; find_feature_matches(img_1, img_2, keypoints_1, keypoints_2, matches); cout << "一共找到了" << matches.size() << "组匹配点" << endl; //-- 估计两张图像间运动 Mat R, t; pose_estimation_2d2d(keypoints_1, keypoints_2, matches, R, t); //-- 三角化 vector<Point3d> points; triangulation(keypoints_1, keypoints_2, matches, R, t, points); //-- 验证三角化点与特征点的重投影关系 Mat K = (Mat_<double>(3, 3) << 520.9, 0, 325.1, 0, 521.0, 249.7, 0, 0, 1); Mat img1_plot = img_1.clone(); Mat img2_plot = img_2.clone(); for (int i = 0; i < matches.size(); i++) { // 第一个图 float depth1 = points[i].z; cout << "depth: " << depth1 << endl; Point2d pt1_cam = pixel2cam(keypoints_1[matches[i].queryIdx].pt, K); cv::circle(img1_plot, keypoints_1[matches[i].queryIdx].pt, 2, get_color(depth1), 2); // 第二个图 Mat pt2_trans = R * (Mat_<double>(3, 1) << points[i].x, points[i].y, points[i].z) + t; float depth2 = pt2_trans.at<double>(2, 0); cv::circle(img2_plot, keypoints_2[matches[i].trainIdx].pt, 2, get_color(depth2), 2); } cv::imshow("img 1", img1_plot); cv::imshow("img 2", img2_plot); cv::waitKey(); return 0; } void find_feature_matches(const Mat &img_1, const Mat &img_2, std::vector<KeyPoint> &keypoints_1, std::vector<KeyPoint> &keypoints_2, std::vector<DMatch> &matches) { //-- 初始化 Mat descriptors_1, descriptors_2; // used in OpenCV3 Ptr<FeatureDetector> detector = ORB::create(); Ptr<DescriptorExtractor> descriptor = ORB::create(); // use this if you are in OpenCV2 // Ptr<FeatureDetector> detector = FeatureDetector::create ( "ORB" ); // Ptr<DescriptorExtractor> descriptor = DescriptorExtractor::create ( "ORB" ); Ptr<DescriptorMatcher> matcher = DescriptorMatcher::create("BruteForce-Hamming"); //-- 第一步:检测 Oriented FAST 角点位置 detector->detect(img_1, keypoints_1); detector->detect(img_2, keypoints_2); //-- 第二步:根据角点位置计算 BRIEF 描述子 descriptor->compute(img_1, keypoints_1, descriptors_1); descriptor->compute(img_2, keypoints_2, descriptors_2); //-- 第三步:对两幅图像中的BRIEF描述子进行匹配,使用 Hamming 距离 vector<DMatch> match; // BFMatcher matcher ( NORM_HAMMING ); matcher->match(descriptors_1, descriptors_2, match); //-- 第四步:匹配点对筛选 double min_dist = 10000, max_dist = 0; //找出所有匹配之间的最小距离和最大距离, 即是最相似的和最不相似的两组点之间的距离 for (int i = 0; i < descriptors_1.rows; i++) { double dist = match[i].distance; if (dist < min_dist) min_dist = dist; if (dist > max_dist) max_dist = dist; } printf("-- Max dist : %f \n", max_dist); printf("-- Min dist : %f \n", min_dist); //当描述子之间的距离大于两倍的最小距离时,即认为匹配有误.但有时候最小距离会非常小,设置一个经验值30作为下限. for (int i = 0; i < descriptors_1.rows; i++) { if (match[i].distance <= max(2 * min_dist, 30.0)) { matches.push_back(match[i]); } } } void pose_estimation_2d2d( const std::vector<KeyPoint> &keypoints_1, const std::vector<KeyPoint> &keypoints_2, const std::vector<DMatch> &matches, Mat &R, Mat &t) { // 相机内参,TUM Freiburg2 Mat K = (Mat_<double>(3, 3) << 520.9, 0, 325.1, 0, 521.0, 249.7, 0, 0, 1); //-- 把匹配点转换为vector<Point2f>的形式 vector<Point2f> points1; vector<Point2f> points2; for (int i = 0; i < (int) matches.size(); i++) { points1.push_back(keypoints_1[matches[i].queryIdx].pt); points2.push_back(keypoints_2[matches[i].trainIdx].pt); } //-- 计算本质矩阵 Point2d principal_point(325.1, 249.7); //相机主点, TUM dataset标定值 int focal_length = 521; //相机焦距, TUM dataset标定值 Mat essential_matrix; essential_matrix = findEssentialMat(points1, points2, focal_length, principal_point); //-- 从本质矩阵中恢复旋转和平移信息. recoverPose(essential_matrix, points1, points2, R, t, focal_length, principal_point); } void triangulation( //通过三角化利用对极几何求解的相机位姿求出特征点的空间位置 const vector<KeyPoint> &keypoint_1, const vector<KeyPoint> &keypoint_2, const std::vector<DMatch> &matches, const Mat &R, const Mat &t, vector<Point3d> &points) { Mat T1 = (Mat_<float>(3, 4) << 1, 0, 0, 0, 0, 1, 0, 0, 0, 0, 1, 0); Mat T2 = (Mat_<float>(3, 4) << R.at<double>(0, 0), R.at<double>(0, 1), R.at<double>(0, 2), t.at<double>(0, 0), R.at<double>(1, 0), R.at<double>(1, 1), R.at<double>(1, 2), t.at<double>(1, 0), R.at<double>(2, 0), R.at<double>(2, 1), R.at<double>(2, 2), t.at<double>(2, 0) ); Mat K = (Mat_<double>(3, 3) << 520.9, 0, 325.1, 0, 521.0, 249.7, 0, 0, 1); vector<Point2f> pts_1, pts_2; for (DMatch m:matches) { // 将像素坐标转换至相机坐标 pts_1.push_back(pixel2cam(keypoint_1[m.queryIdx].pt, K)); pts_2.push_back(pixel2cam(keypoint_2[m.trainIdx].pt, K)); } Mat pts_4d; cv::triangulatePoints(T1, T2, pts_1, pts_2, pts_4d); // 转换成非齐次坐标 for (int i = 0; i < pts_4d.cols; i++) { Mat x = pts_4d.col(i); x /= x.at<float>(3, 0); // 归一化 Point3d p( x.at<float>(0, 0), x.at<float>(1, 0), x.at<float>(2, 0) ); points.push_back(p); } } Point2f pixel2cam(const Point2d &p, const Mat &K) { return Point2f ( (p.x - K.at<double>(0, 2)) / K.at<double>(0, 0), (p.y - K.at<double>(1, 2)) / K.at<double>(1, 1) ); }
复制
#include <iostream> #include <opencv2/opencv.hpp> // #include "extra.h" // used in opencv2 using namespace std; using namespace cv; void find_feature_matches( const Mat &img_1, const Mat &img_2, std::vector<KeyPoint> &keypoints_1, std::vector<KeyPoint> &keypoints_2, std::vector<DMatch> &matches); void pose_estimation_2d2d( const std::vector<KeyPoint> &keypoints_1, const std::vector<KeyPoint> &keypoints_2, const std::vector<DMatch> &matches, Mat &R, Mat &t); void triangulation( const vector<KeyPoint> &keypoint_1, const vector<KeyPoint> &keypoint_2, const std::vector<DMatch> &matches, const Mat &R, const Mat &t, vector<Point3d> &points ); /// 作图用 inline cv::Scalar get_color(float depth) { float up_th = 50, low_th = 10, th_range = up_th - low_th; if (depth > up_th) depth = up_th; if (depth < low_th) depth = low_th; return cv::Scalar(255 * depth / th_range, 0, 255 * (1 - depth / th_range)); } // 像素坐标转相机归一化坐标 Point2f pixel2cam(const Point2d &p, const Mat &K); int main(int argc, char **argv) { if (argc != 3) { cout << "usage: triangulation img1 img2" << endl; return 1; } //-- 读取图像 Mat img_1 = imread(argv[1], CV_LOAD_IMAGE_COLOR); Mat img_2 = imread(argv[2], CV_LOAD_IMAGE_COLOR); vector<KeyPoint> keypoints_1, keypoints_2; vector<DMatch> matches; find_feature_matches(img_1, img_2, keypoints_1, keypoints_2, matches); cout << "一共找到了" << matches.size() << "组匹配点" << endl; //-- 估计两张图像间运动 Mat R, t; pose_estimation_2d2d(keypoints_1, keypoints_2, matches, R, t); //-- 三角化 vector<Point3d> points; triangulation(keypoints_1, keypoints_2, matches, R, t, points); //-- 验证三角化点与特征点的重投影关系 Mat K = (Mat_<double>(3, 3) << 520.9, 0, 325.1, 0, 521.0, 249.7, 0, 0, 1); Mat img1_plot = img_1.clone(); Mat img2_plot = img_2.clone(); for (int i = 0; i < matches.size(); i++) { // 第一个图 float depth1 = points[i].z; cout << "depth: " << depth1 << endl; Point2d pt1_cam = pixel2cam(keypoints_1[matches[i].queryIdx].pt, K); cv::circle(img1_plot, keypoints_1[matches[i].queryIdx].pt, 2, get_color(depth1), 2); // 第二个图 Mat pt2_trans = R * (Mat_<double>(3, 1) << points[i].x, points[i].y, points[i].z) + t; float depth2 = pt2_trans.at<double>(2, 0); cv::circle(img2_plot, keypoints_2[matches[i].trainIdx].pt, 2, get_color(depth2), 2); } cv::imshow("img 1", img1_plot); cv::imshow("img 2", img2_plot); cv::waitKey(); return 0; } void find_feature_matches(const Mat &img_1, const Mat &img_2, std::vector<KeyPoint> &keypoints_1, std::vector<KeyPoint> &keypoints_2, std::vector<DMatch> &matches) { //-- 初始化 Mat descriptors_1, descriptors_2; // used in OpenCV3 Ptr<FeatureDetector> detector = ORB::create(); Ptr<DescriptorExtractor> descriptor = ORB::create(); // use this if you are in OpenCV2 // Ptr<FeatureDetector> detector = FeatureDetector::create ( "ORB" ); // Ptr<DescriptorExtractor> descriptor = DescriptorExtractor::create ( "ORB" ); Ptr<DescriptorMatcher> matcher = DescriptorMatcher::create("BruteForce-Hamming"); //-- 第一步:检测 Oriented FAST 角点位置 detector->detect(img_1, keypoints_1); detector->detect(img_2, keypoints_2); //-- 第二步:根据角点位置计算 BRIEF 描述子 descriptor->compute(img_1, keypoints_1, descriptors_1); descriptor->compute(img_2, keypoints_2, descriptors_2); //-- 第三步:对两幅图像中的BRIEF描述子进行匹配,使用 Hamming 距离 vector<DMatch> match; // BFMatcher matcher ( NORM_HAMMING ); matcher->match(descriptors_1, descriptors_2, match); //-- 第四步:匹配点对筛选 double min_dist = 10000, max_dist = 0; //找出所有匹配之间的最小距离和最大距离, 即是最相似的和最不相似的两组点之间的距离 for (int i = 0; i < descriptors_1.rows; i++) { double dist = match[i].distance; if (dist < min_dist) min_dist = dist; if (dist > max_dist) max_dist = dist; } printf("-- Max dist : %f \n", max_dist); printf("-- Min dist : %f \n", min_dist); //当描述子之间的距离大于两倍的最小距离时,即认为匹配有误.但有时候最小距离会非常小,设置一个经验值30作为下限. for (int i = 0; i < descriptors_1.rows; i++) { if (match[i].distance <= max(2 * min_dist, 30.0)) { matches.push_back(match[i]); } } } void pose_estimation_2d2d( const std::vector<KeyPoint> &keypoints_1, const std::vector<KeyPoint> &keypoints_2, const std::vector<DMatch> &matches, Mat &R, Mat &t) { // 相机内参,TUM Freiburg2 Mat K = (Mat_<double>(3, 3) << 520.9, 0, 325.1, 0, 521.0, 249.7, 0, 0, 1); //-- 把匹配点转换为vector<Point2f>的形式 vector<Point2f> points1; vector<Point2f> points2; for (int i = 0; i < (int) matches.size(); i++) { points1.push_back(keypoints_1[matches[i].queryIdx].pt); points2.push_back(keypoints_2[matches[i].trainIdx].pt); } //-- 计算本质矩阵 Point2d principal_point(325.1, 249.7); //相机主点, TUM dataset标定值 int focal_length = 521; //相机焦距, TUM dataset标定值 Mat essential_matrix; essential_matrix = findEssentialMat(points1, points2, focal_length, principal_point); //-- 从本质矩阵中恢复旋转和平移信息. recoverPose(essential_matrix, points1, points2, R, t, focal_length, principal_point); } void triangulation( //通过三角化利用对极几何求解的相机位姿求出特征点的空间位置 const vector<KeyPoint> &keypoint_1, const vector<KeyPoint> &keypoint_2, const std::vector<DMatch> &matches, const Mat &R, const Mat &t, vector<Point3d> &points) { Mat T1 = (Mat_<float>(3, 4) << 1, 0, 0, 0, 0, 1, 0, 0, 0, 0, 1, 0); Mat T2 = (Mat_<float>(3, 4) << R.at<double>(0, 0), R.at<double>(0, 1), R.at<double>(0, 2), t.at<double>(0, 0), R.at<double>(1, 0), R.at<double>(1, 1), R.at<double>(1, 2), t.at<double>(1, 0), R.at<double>(2, 0), R.at<double>(2, 1), R.at<double>(2, 2), t.at<double>(2, 0) ); Mat K = (Mat_<double>(3, 3) << 520.9, 0, 325.1, 0, 521.0, 249.7, 0, 0, 1); vector<Point2f> pts_1, pts_2; for (DMatch m:matches) { // 将像素坐标转换至相机坐标 pts_1.push_back(pixel2cam(keypoint_1[m.queryIdx].pt, K)); pts_2.push_back(pixel2cam(keypoint_2[m.trainIdx].pt, K)); } Mat pts_4d; cv::triangulatePoints(T1, T2, pts_1, pts_2, pts_4d); // 转换成非齐次坐标 for (int i = 0; i < pts_4d.cols; i++) { Mat x = pts_4d.col(i); x /= x.at<float>(3, 0); // 归一化 Point3d p( x.at<float>(0, 0), x.at<float>(1, 0), x.at<float>(2, 0) ); points.push_back(p); } } Point2f pixel2cam(const Point2d &p, const Mat &K) { return Point2f ( (p.x - K.at<double>(0, 2)) / K.at<double>(0, 0), (p.y - K.at<double>(1, 2)) / K.at<double>(1, 1) ); }
复制
复制
复制
7.7 3D-2D: PnP
编译运行代码结果如下:
[ INFO:0] Initialize OpenCL runtime...
-- Max dist : 95.000000
-- Min dist : 7.000000
一共找到了81组匹配点
3d-2d pairs: 77
solve pnp in opencv cost time: 0.0142977 seconds.
R=
[0.9979193252225095, -0.05138618904650329, 0.03894200717385431;
0.05033852907733768, 0.9983556574295407, 0.0274228694479559;
-0.04028712992732943, -0.02540552801471818, 0.998865109165653]
t=
[-0.1255867099750184;
-0.007363525258815287;
0.06099926588678122]
calling bundle adjustment by gauss newton
iteration 0 cost=44765.3537799
iteration 1 cost=431.695366816
iteration 2 cost=319.560037493
iteration 3 cost=319.55886789
pose by g-n:
0.997919325221 -0.0513861890122 0.0389420072614 -0.125586710123
0.0503385290405 0.998355657431 0.0274228694545 -0.00736352527141
-0.0402871300142 -0.0254055280183 0.998865109162 0.0609992659219
0 0 0 1
solve pnp by gauss newton cost time: 9.4266e-05 seconds.
calling bundle adjustment by g2o
iteration= 0 chi2= 431.695367 time= 2.3349e-05 cumTime= 2.3349e-05 edges= 77 schur= 0
iteration= 1 chi2= 319.560037 time= 1.0797e-05 cumTime= 3.4146e-05 edges= 77 schur= 0
iteration= 2 chi2= 319.558868 time= 1.0022e-05 cumTime= 4.4168e-05 edges= 77 schur= 0
iteration= 3 chi2= 319.558868 time= 9.89402e-06 cumTime= 5.4062e-05 edges= 77 schur= 0
iteration= 4 chi2= 319.558868 time= 9.83902e-06 cumTime= 6.3901e-05 edges= 77 schur= 0
iteration= 5 chi2= 319.558868 time= 9.86701e-06 cumTime= 7.3768e-05 edges= 77 schur= 0
iteration= 6 chi2= 319.558868 time= 9.80101e-06 cumTime= 8.3569e-05 edges= 77 schur= 0
iteration= 7 chi2= 319.558868 time= 9.78299e-06 cumTime= 9.3352e-05 edges= 77 schur= 0
iteration= 8 chi2= 319.558868 time= 9.785e-06 cumTime= 0.000103137 edges= 77 schur= 0
iteration= 9 chi2= 319.558868 time= 9.765e-06 cumTime= 0.000112902 edges= 77 schur= 0
optimization costs time: 0.000419886 seconds.
pose estimated by g2o =
0.997919325223 -0.0513861890471 0.0389420071732 -0.125586709974
0.0503385290779 0.998355657429 0.0274228694493 -0.007363525261
-0.0402871299268 -0.0254055280161 0.998865109166 0.0609992658862
0 0 0 1
solve pnp by g2o cost time: 0.000538141 seconds.
*** 正常退出 ***
[ INFO:0] Initialize OpenCL runtime... -- Max dist : 95.000000 -- Min dist : 7.000000 一共找到了81组匹配点 3d-2d pairs: 77 solve pnp in opencv cost time: 0.0142977 seconds. R= [0.9979193252225095, -0.05138618904650329, 0.03894200717385431; 0.05033852907733768, 0.9983556574295407, 0.0274228694479559; -0.04028712992732943, -0.02540552801471818, 0.998865109165653] t= [-0.1255867099750184; -0.007363525258815287; 0.06099926588678122] calling bundle adjustment by gauss newton iteration 0 cost=44765.3537799 iteration 1 cost=431.695366816 iteration 2 cost=319.560037493 iteration 3 cost=319.55886789 pose by g-n: 0.997919325221 -0.0513861890122 0.0389420072614 -0.125586710123 0.0503385290405 0.998355657431 0.0274228694545 -0.00736352527141 -0.0402871300142 -0.0254055280183 0.998865109162 0.0609992659219 0 0 0 1 solve pnp by gauss newton cost time: 9.4266e-05 seconds. calling bundle adjustment by g2o iteration= 0 chi2= 431.695367 time= 2.3349e-05 cumTime= 2.3349e-05 edges= 77 schur= 0 iteration= 1 chi2= 319.560037 time= 1.0797e-05 cumTime= 3.4146e-05 edges= 77 schur= 0 iteration= 2 chi2= 319.558868 time= 1.0022e-05 cumTime= 4.4168e-05 edges= 77 schur= 0 iteration= 3 chi2= 319.558868 time= 9.89402e-06 cumTime= 5.4062e-05 edges= 77 schur= 0 iteration= 4 chi2= 319.558868 time= 9.83902e-06 cumTime= 6.3901e-05 edges= 77 schur= 0 iteration= 5 chi2= 319.558868 time= 9.86701e-06 cumTime= 7.3768e-05 edges= 77 schur= 0 iteration= 6 chi2= 319.558868 time= 9.80101e-06 cumTime= 8.3569e-05 edges= 77 schur= 0 iteration= 7 chi2= 319.558868 time= 9.78299e-06 cumTime= 9.3352e-05 edges= 77 schur= 0 iteration= 8 chi2= 319.558868 time= 9.785e-06 cumTime= 0.000103137 edges= 77 schur= 0 iteration= 9 chi2= 319.558868 time= 9.765e-06 cumTime= 0.000112902 edges= 77 schur= 0 optimization costs time: 0.000419886 seconds. pose estimated by g2o = 0.997919325223 -0.0513861890471 0.0389420071732 -0.125586709974 0.0503385290779 0.998355657429 0.0274228694493 -0.007363525261 -0.0402871299268 -0.0254055280161 0.998865109166 0.0609992658862 0 0 0 1 solve pnp by g2o cost time: 0.000538141 seconds. *** 正常退出 ***
[ INFO:0] Initialize OpenCL runtime... -- Max dist : 95.000000 -- Min dist : 7.000000 一共找到了81组匹配点 3d-2d pairs: 77 solve pnp in opencv cost time: 0.0142977 seconds. R= [0.9979193252225095, -0.05138618904650329, 0.03894200717385431; 0.05033852907733768, 0.9983556574295407, 0.0274228694479559; -0.04028712992732943, -0.02540552801471818, 0.998865109165653] t= [-0.1255867099750184; -0.007363525258815287; 0.06099926588678122] calling bundle adjustment by gauss newton iteration 0 cost=44765.3537799 iteration 1 cost=431.695366816 iteration 2 cost=319.560037493 iteration 3 cost=319.55886789 pose by g-n: 0.997919325221 -0.0513861890122 0.0389420072614 -0.125586710123 0.0503385290405 0.998355657431 0.0274228694545 -0.00736352527141 -0.0402871300142 -0.0254055280183 0.998865109162 0.0609992659219 0 0 0 1 solve pnp by gauss newton cost time: 9.4266e-05 seconds. calling bundle adjustment by g2o iteration= 0 chi2= 431.695367 time= 2.3349e-05 cumTime= 2.3349e-05 edges= 77 schur= 0 iteration= 1 chi2= 319.560037 time= 1.0797e-05 cumTime= 3.4146e-05 edges= 77 schur= 0 iteration= 2 chi2= 319.558868 time= 1.0022e-05 cumTime= 4.4168e-05 edges= 77 schur= 0 iteration= 3 chi2= 319.558868 time= 9.89402e-06 cumTime= 5.4062e-05 edges= 77 schur= 0 iteration= 4 chi2= 319.558868 time= 9.83902e-06 cumTime= 6.3901e-05 edges= 77 schur= 0 iteration= 5 chi2= 319.558868 time= 9.86701e-06 cumTime= 7.3768e-05 edges= 77 schur= 0 iteration= 6 chi2= 319.558868 time= 9.80101e-06 cumTime= 8.3569e-05 edges= 77 schur= 0 iteration= 7 chi2= 319.558868 time= 9.78299e-06 cumTime= 9.3352e-05 edges= 77 schur= 0 iteration= 8 chi2= 319.558868 time= 9.785e-06 cumTime= 0.000103137 edges= 77 schur= 0 iteration= 9 chi2= 319.558868 time= 9.765e-06 cumTime= 0.000112902 edges= 77 schur= 0 optimization costs time: 0.000419886 seconds. pose estimated by g2o = 0.997919325223 -0.0513861890471 0.0389420071732 -0.125586709974 0.0503385290779 0.998355657429 0.0274228694493 -0.007363525261 -0.0402871299268 -0.0254055280161 0.998865109166 0.0609992658862 0 0 0 1 solve pnp by g2o cost time: 0.000538141 seconds. *** 正常退出 ***
复制
[ INFO:0] Initialize OpenCL runtime... -- Max dist : 95.000000 -- Min dist : 7.000000 一共找到了81组匹配点 3d-2d pairs: 77 solve pnp in opencv cost time: 0.0142977 seconds. R= [0.9979193252225095, -0.05138618904650329, 0.03894200717385431; 0.05033852907733768, 0.9983556574295407, 0.0274228694479559; -0.04028712992732943, -0.02540552801471818, 0.998865109165653] t= [-0.1255867099750184; -0.007363525258815287; 0.06099926588678122] calling bundle adjustment by gauss newton iteration 0 cost=44765.3537799 iteration 1 cost=431.695366816 iteration 2 cost=319.560037493 iteration 3 cost=319.55886789 pose by g-n: 0.997919325221 -0.0513861890122 0.0389420072614 -0.125586710123 0.0503385290405 0.998355657431 0.0274228694545 -0.00736352527141 -0.0402871300142 -0.0254055280183 0.998865109162 0.0609992659219 0 0 0 1 solve pnp by gauss newton cost time: 9.4266e-05 seconds. calling bundle adjustment by g2o iteration= 0 chi2= 431.695367 time= 2.3349e-05 cumTime= 2.3349e-05 edges= 77 schur= 0 iteration= 1 chi2= 319.560037 time= 1.0797e-05 cumTime= 3.4146e-05 edges= 77 schur= 0 iteration= 2 chi2= 319.558868 time= 1.0022e-05 cumTime= 4.4168e-05 edges= 77 schur= 0 iteration= 3 chi2= 319.558868 time= 9.89402e-06 cumTime= 5.4062e-05 edges= 77 schur= 0 iteration= 4 chi2= 319.558868 time= 9.83902e-06 cumTime= 6.3901e-05 edges= 77 schur= 0 iteration= 5 chi2= 319.558868 time= 9.86701e-06 cumTime= 7.3768e-05 edges= 77 schur= 0 iteration= 6 chi2= 319.558868 time= 9.80101e-06 cumTime= 8.3569e-05 edges= 77 schur= 0 iteration= 7 chi2= 319.558868 time= 9.78299e-06 cumTime= 9.3352e-05 edges= 77 schur= 0 iteration= 8 chi2= 319.558868 time= 9.785e-06 cumTime= 0.000103137 edges= 77 schur= 0 iteration= 9 chi2= 319.558868 time= 9.765e-06 cumTime= 0.000112902 edges= 77 schur= 0 optimization costs time: 0.000419886 seconds. pose estimated by g2o = 0.997919325223 -0.0513861890471 0.0389420071732 -0.125586709974 0.0503385290779 0.998355657429 0.0274228694493 -0.007363525261 -0.0402871299268 -0.0254055280161 0.998865109166 0.0609992658862 0 0 0 1 solve pnp by g2o cost time: 0.000538141 seconds. *** 正常退出 ***
复制
复制
复制
代码及注释如下:
1.open CV直接求解
1.open CV直接求解
chrono::steady_clock::time_point t1 = chrono::steady_clock::now();
Mat r, t;
solvePnP(pts_3d, pts_2d, K, Mat(), r, t, false); // 调用OpenCV 的 PnP 求解,可选择EPNP,DLS等方法
Mat R;
cv::Rodrigues(r, R); // r为旋转向量形式,用Rodrigues公式转换为矩阵
chrono::steady_clock::time_point t2 = chrono::steady_clock::now();
chrono::duration<double> time_used = chrono::duration_cast<chrono::duration<double>>(t2 - t1);
cout << "solve pnp in opencv cost time: " << time_used.count() << " seconds." << endl;
cout << "R=" << endl << R << endl;
cout << "t=" << endl << t << endl;
chrono::steady_clock::time_point t1 = chrono::steady_clock::now(); Mat r, t; solvePnP(pts_3d, pts_2d, K, Mat(), r, t, false); // 调用OpenCV 的 PnP 求解,可选择EPNP,DLS等方法 Mat R; cv::Rodrigues(r, R); // r为旋转向量形式,用Rodrigues公式转换为矩阵 chrono::steady_clock::time_point t2 = chrono::steady_clock::now(); chrono::duration<double> time_used = chrono::duration_cast<chrono::duration<double>>(t2 - t1); cout << "solve pnp in opencv cost time: " << time_used.count() << " seconds." << endl; cout << "R=" << endl << R << endl; cout << "t=" << endl << t << endl;
chrono::steady_clock::time_point t1 = chrono::steady_clock::now(); Mat r, t; solvePnP(pts_3d, pts_2d, K, Mat(), r, t, false); // 调用OpenCV 的 PnP 求解,可选择EPNP,DLS等方法 Mat R; cv::Rodrigues(r, R); // r为旋转向量形式,用Rodrigues公式转换为矩阵 chrono::steady_clock::time_point t2 = chrono::steady_clock::now(); chrono::duration<double> time_used = chrono::duration_cast<chrono::duration<double>>(t2 - t1); cout << "solve pnp in opencv cost time: " << time_used.count() << " seconds." << endl; cout << "R=" << endl << R << endl; cout << "t=" << endl << t << endl;
复制
chrono::steady_clock::time_point t1 = chrono::steady_clock::now(); Mat r, t; solvePnP(pts_3d, pts_2d, K, Mat(), r, t, false); // 调用OpenCV 的 PnP 求解,可选择EPNP,DLS等方法 Mat R; cv::Rodrigues(r, R); // r为旋转向量形式,用Rodrigues公式转换为矩阵 chrono::steady_clock::time_point t2 = chrono::steady_clock::now(); chrono::duration<double> time_used = chrono::duration_cast<chrono::duration<double>>(t2 - t1); cout << "solve pnp in opencv cost time: " << time_used.count() << " seconds." << endl; cout << "R=" << endl << R << endl; cout << "t=" << endl << t << endl;
复制
复制
复制
手写位姿估计,先写高斯牛顿法的PnP,然后调用g2o求解
void bundleAdjustmentGaussNewton(
const VecVector3d &points_3d,
const VecVector2d &points_2d,
const Mat &K,
Sophus::SE3d &pose) {
typedef Eigen::Matrix<double, 6, 1> Vector6d;
const int iterations = 10;
double cost = 0, lastCost = 0;
double fx = K.at<double>(0, 0);
double fy = K.at<double>(1, 1);
double cx = K.at<double>(0, 2);
double cy = K.at<double>(1, 2);
for (int iter = 0; iter < iterations; iter++) {
Eigen::Matrix<double, 6, 6> H = Eigen::Matrix<double, 6, 6>::Zero();
Vector6d b = Vector6d::Zero();
cost = 0;
// compute cost
for (int i = 0; i < points_3d.size(); i++) {
Eigen::Vector3d pc = pose * points_3d[i];
double inv_z = 1.0 / pc[2];
double inv_z2 = inv_z * inv_z;
Eigen::Vector2d proj(fx * pc[0] / pc[2] + cx, fy * pc[1] / pc[2] + cy);
Eigen::Vector2d e = points_2d[i] - proj;
cost += e.squaredNorm();
Eigen::Matrix<double, 2, 6> J;
J << -fx * inv_z,
0,
fx * pc[0] * inv_z2,
fx * pc[0] * pc[1] * inv_z2,
-fx - fx * pc[0] * pc[0] * inv_z2,
fx * pc[1] * inv_z,
0,
-fy * inv_z,
fy * pc[1] * inv_z2,
fy + fy * pc[1] * pc[1] * inv_z2,
-fy * pc[0] * pc[1] * inv_z2,
-fy * pc[0] * inv_z;
H += J.transpose() * J;
b += -J.transpose() * e;
}
Vector6d dx;
dx = H.ldlt().solve(b);
if (isnan(dx[0])) {
cout << "result is nan!" << endl;
break;
}
if (iter > 0 && cost >= lastCost) {
// cost increase, update is not good
cout << "cost: " << cost << ", last cost: " << lastCost << endl;
break;
}
// update your estimation
pose = Sophus::SE3d::exp(dx) * pose;
lastCost = cost;
cout << "iteration " << iter << " cost=" << std::setprecision(12) << cost << endl;
if (dx.norm() < 1e-6) {
// converge
break;
}
}
cout << "pose by g-n: \n" << pose.matrix() << endl;
}
void bundleAdjustmentGaussNewton( const VecVector3d &points_3d, const VecVector2d &points_2d, const Mat &K, Sophus::SE3d &pose) { typedef Eigen::Matrix<double, 6, 1> Vector6d; const int iterations = 10; double cost = 0, lastCost = 0; double fx = K.at<double>(0, 0); double fy = K.at<double>(1, 1); double cx = K.at<double>(0, 2); double cy = K.at<double>(1, 2); for (int iter = 0; iter < iterations; iter++) { Eigen::Matrix<double, 6, 6> H = Eigen::Matrix<double, 6, 6>::Zero(); Vector6d b = Vector6d::Zero(); cost = 0; // compute cost for (int i = 0; i < points_3d.size(); i++) { Eigen::Vector3d pc = pose * points_3d[i]; double inv_z = 1.0 / pc[2]; double inv_z2 = inv_z * inv_z; Eigen::Vector2d proj(fx * pc[0] / pc[2] + cx, fy * pc[1] / pc[2] + cy); Eigen::Vector2d e = points_2d[i] - proj; cost += e.squaredNorm(); Eigen::Matrix<double, 2, 6> J; J << -fx * inv_z, 0, fx * pc[0] * inv_z2, fx * pc[0] * pc[1] * inv_z2, -fx - fx * pc[0] * pc[0] * inv_z2, fx * pc[1] * inv_z, 0, -fy * inv_z, fy * pc[1] * inv_z2, fy + fy * pc[1] * pc[1] * inv_z2, -fy * pc[0] * pc[1] * inv_z2, -fy * pc[0] * inv_z; H += J.transpose() * J; b += -J.transpose() * e; } Vector6d dx; dx = H.ldlt().solve(b); if (isnan(dx[0])) { cout << "result is nan!" << endl; break; } if (iter > 0 && cost >= lastCost) { // cost increase, update is not good cout << "cost: " << cost << ", last cost: " << lastCost << endl; break; } // update your estimation pose = Sophus::SE3d::exp(dx) * pose; lastCost = cost; cout << "iteration " << iter << " cost=" << std::setprecision(12) << cost << endl; if (dx.norm() < 1e-6) { // converge break; } } cout << "pose by g-n: \n" << pose.matrix() << endl; }
void bundleAdjustmentGaussNewton( const VecVector3d &points_3d, const VecVector2d &points_2d, const Mat &K, Sophus::SE3d &pose) { typedef Eigen::Matrix<double, 6, 1> Vector6d; const int iterations = 10; double cost = 0, lastCost = 0; double fx = K.at<double>(0, 0); double fy = K.at<double>(1, 1); double cx = K.at<double>(0, 2); double cy = K.at<double>(1, 2); for (int iter = 0; iter < iterations; iter++) { Eigen::Matrix<double, 6, 6> H = Eigen::Matrix<double, 6, 6>::Zero(); Vector6d b = Vector6d::Zero(); cost = 0; // compute cost for (int i = 0; i < points_3d.size(); i++) { Eigen::Vector3d pc = pose * points_3d[i]; double inv_z = 1.0 / pc[2]; double inv_z2 = inv_z * inv_z; Eigen::Vector2d proj(fx * pc[0] / pc[2] + cx, fy * pc[1] / pc[2] + cy); Eigen::Vector2d e = points_2d[i] - proj; cost += e.squaredNorm(); Eigen::Matrix<double, 2, 6> J; J << -fx * inv_z, 0, fx * pc[0] * inv_z2, fx * pc[0] * pc[1] * inv_z2, -fx - fx * pc[0] * pc[0] * inv_z2, fx * pc[1] * inv_z, 0, -fy * inv_z, fy * pc[1] * inv_z2, fy + fy * pc[1] * pc[1] * inv_z2, -fy * pc[0] * pc[1] * inv_z2, -fy * pc[0] * inv_z; H += J.transpose() * J; b += -J.transpose() * e; } Vector6d dx; dx = H.ldlt().solve(b); if (isnan(dx[0])) { cout << "result is nan!" << endl; break; } if (iter > 0 && cost >= lastCost) { // cost increase, update is not good cout << "cost: " << cost << ", last cost: " << lastCost << endl; break; } // update your estimation pose = Sophus::SE3d::exp(dx) * pose; lastCost = cost; cout << "iteration " << iter << " cost=" << std::setprecision(12) << cost << endl; if (dx.norm() < 1e-6) { // converge break; } } cout << "pose by g-n: \n" << pose.matrix() << endl; }
复制
void bundleAdjustmentGaussNewton( const VecVector3d &points_3d, const VecVector2d &points_2d, const Mat &K, Sophus::SE3d &pose) { typedef Eigen::Matrix<double, 6, 1> Vector6d; const int iterations = 10; double cost = 0, lastCost = 0; double fx = K.at<double>(0, 0); double fy = K.at<double>(1, 1); double cx = K.at<double>(0, 2); double cy = K.at<double>(1, 2); for (int iter = 0; iter < iterations; iter++) { Eigen::Matrix<double, 6, 6> H = Eigen::Matrix<double, 6, 6>::Zero(); Vector6d b = Vector6d::Zero(); cost = 0; // compute cost for (int i = 0; i < points_3d.size(); i++) { Eigen::Vector3d pc = pose * points_3d[i]; double inv_z = 1.0 / pc[2]; double inv_z2 = inv_z * inv_z; Eigen::Vector2d proj(fx * pc[0] / pc[2] + cx, fy * pc[1] / pc[2] + cy); Eigen::Vector2d e = points_2d[i] - proj; cost += e.squaredNorm(); Eigen::Matrix<double, 2, 6> J; J << -fx * inv_z, 0, fx * pc[0] * inv_z2, fx * pc[0] * pc[1] * inv_z2, -fx - fx * pc[0] * pc[0] * inv_z2, fx * pc[1] * inv_z, 0, -fy * inv_z, fy * pc[1] * inv_z2, fy + fy * pc[1] * pc[1] * inv_z2, -fy * pc[0] * pc[1] * inv_z2, -fy * pc[0] * inv_z; H += J.transpose() * J; b += -J.transpose() * e; } Vector6d dx; dx = H.ldlt().solve(b); if (isnan(dx[0])) { cout << "result is nan!" << endl; break; } if (iter > 0 && cost >= lastCost) { // cost increase, update is not good cout << "cost: " << cost << ", last cost: " << lastCost << endl; break; } // update your estimation pose = Sophus::SE3d::exp(dx) * pose; lastCost = cost; cout << "iteration " << iter << " cost=" << std::setprecision(12) << cost << endl; if (dx.norm() < 1e-6) { // converge break; } } cout << "pose by g-n: \n" << pose.matrix() << endl; }
复制
复制
复制
使用g2o进行BA优化
使用g2o进行BA优化
/实现顶点更新与边的误差计算
class VertexPose : public g2o::BaseVertex<6, Sophus::SE3d> {
public:
EIGEN_MAKE_ALIGNED_OPERATOR_NEW;
virtual void setToOriginImpl() override {
_estimate = Sophus::SE3d();
}
/// left multiplication on SE3
virtual void oplusImpl(const double *update) override {
Eigen::Matrix<double, 6, 1> update_eigen;
update_eigen << update[0], update[1], update[2], update[3], update[4], update[5];
_estimate = Sophus::SE3d::exp(update_eigen) * _estimate;
}
virtual bool read(istream &in) override {}
virtual bool write(ostream &out) const override {}
};
class EdgeProjection : public g2o::BaseUnaryEdge<2, Eigen::Vector2d, VertexPose> {
public:
EIGEN_MAKE_ALIGNED_OPERATOR_NEW;
EdgeProjection(const Eigen::Vector3d &pos, const Eigen::Matrix3d &K) : _pos3d(pos), _K(K) {}
virtual void computeError() override {
const VertexPose *v = static_cast<VertexPose *> (_vertices[0]);
Sophus::SE3d T = v->estimate();
Eigen::Vector3d pos_pixel = _K * (T * _pos3d);
pos_pixel /= pos_pixel[2];
_error = _measurement - pos_pixel.head<2>();
}
virtual void linearizeOplus() override {
const VertexPose *v = static_cast<VertexPose *> (_vertices[0]);
Sophus::SE3d T = v->estimate();
Eigen::Vector3d pos_cam = T * _pos3d;
double fx = _K(0, 0);
double fy = _K(1, 1);
double cx = _K(0, 2);
double cy = _K(1, 2);
double X = pos_cam[0];
double Y = pos_cam[1];
double Z = pos_cam[2];
double Z2 = Z * Z;
_jacobianOplusXi
<< -fx / Z, 0, fx * X / Z2, fx * X * Y / Z2, -fx - fx * X * X / Z2, fx * Y / Z,
0, -fy / Z, fy * Y / (Z * Z), fy + fy * Y * Y / Z2, -fy * X * Y / Z2, -fy * X / Z;
}
virtual bool read(istream &in) override {}
virtual bool write(ostream &out) const override {}
private:
Eigen::Vector3d _pos3d;
Eigen::Matrix3d _K;
};
/组成图优化问题
void bundleAdjustmentG2O(
const VecVector3d &points_3d,
const VecVector2d &points_2d,
const Mat &K,
Sophus::SE3d &pose) {
// 构建图优化,先设定g2o
typedef g2o::BlockSolver<g2o::BlockSolverTraits<6, 3>> BlockSolverType; // pose is 6, landmark is 3
typedef g2o::LinearSolverDense<BlockSolverType::PoseMatrixType> LinearSolverType; // 线性求解器类型
// 梯度下降方法,可以从GN, LM, DogLeg 中选
auto solver = new g2o::OptimizationAlgorithmGaussNewton(
g2o::make_unique<BlockSolverType>(g2o::make_unique<LinearSolverType>()));
g2o::SparseOptimizer optimizer; // 图模型
optimizer.setAlgorithm(solver); // 设置求解器
optimizer.setVerbose(true); // 打开调试输出
// vertex
VertexPose *vertex_pose = new VertexPose(); // camera vertex_pose
vertex_pose->setId(0);
vertex_pose->setEstimate(Sophus::SE3d());
optimizer.addVertex(vertex_pose);
// K
Eigen::Matrix3d K_eigen;
K_eigen <<
K.at<double>(0, 0), K.at<double>(0, 1), K.at<double>(0, 2),
K.at<double>(1, 0), K.at<double>(1, 1), K.at<double>(1, 2),
K.at<double>(2, 0), K.at<double>(2, 1), K.at<double>(2, 2);
// edges
int index = 1;
for (size_t i = 0; i < points_2d.size(); ++i) {
auto p2d = points_2d[i];
auto p3d = points_3d[i];
EdgeProjection *edge = new EdgeProjection(p3d, K_eigen);
edge->setId(index);
edge->setVertex(0, vertex_pose);
edge->setMeasurement(p2d);
edge->setInformation(Eigen::Matrix2d::Identity());
optimizer.addEdge(edge);
index++;
}
chrono::steady_clock::time_point t1 = chrono::steady_clock::now();
optimizer.setVerbose(true);
optimizer.initializeOptimization();
optimizer.optimize(10);
chrono::steady_clock::time_point t2 = chrono::steady_clock::now();
chrono::duration<double> time_used = chrono::duration_cast<chrono::duration<double>>(t2 - t1);
cout << "optimization costs time: " << time_used.count() << " seconds." << endl;
cout << "pose estimated by g2o =\n" << vertex_pose->estimate().matrix() << endl;
pose = vertex_pose->estimate();
}
/实现顶点更新与边的误差计算 class VertexPose : public g2o::BaseVertex<6, Sophus::SE3d> { public: EIGEN_MAKE_ALIGNED_OPERATOR_NEW; virtual void setToOriginImpl() override { _estimate = Sophus::SE3d(); } /// left multiplication on SE3 virtual void oplusImpl(const double *update) override { Eigen::Matrix<double, 6, 1> update_eigen; update_eigen << update[0], update[1], update[2], update[3], update[4], update[5]; _estimate = Sophus::SE3d::exp(update_eigen) * _estimate; } virtual bool read(istream &in) override {} virtual bool write(ostream &out) const override {} }; class EdgeProjection : public g2o::BaseUnaryEdge<2, Eigen::Vector2d, VertexPose> { public: EIGEN_MAKE_ALIGNED_OPERATOR_NEW; EdgeProjection(const Eigen::Vector3d &pos, const Eigen::Matrix3d &K) : _pos3d(pos), _K(K) {} virtual void computeError() override { const VertexPose *v = static_cast<VertexPose *> (_vertices[0]); Sophus::SE3d T = v->estimate(); Eigen::Vector3d pos_pixel = _K * (T * _pos3d); pos_pixel /= pos_pixel[2]; _error = _measurement - pos_pixel.head<2>(); } virtual void linearizeOplus() override { const VertexPose *v = static_cast<VertexPose *> (_vertices[0]); Sophus::SE3d T = v->estimate(); Eigen::Vector3d pos_cam = T * _pos3d; double fx = _K(0, 0); double fy = _K(1, 1); double cx = _K(0, 2); double cy = _K(1, 2); double X = pos_cam[0]; double Y = pos_cam[1]; double Z = pos_cam[2]; double Z2 = Z * Z; _jacobianOplusXi << -fx / Z, 0, fx * X / Z2, fx * X * Y / Z2, -fx - fx * X * X / Z2, fx * Y / Z, 0, -fy / Z, fy * Y / (Z * Z), fy + fy * Y * Y / Z2, -fy * X * Y / Z2, -fy * X / Z; } virtual bool read(istream &in) override {} virtual bool write(ostream &out) const override {} private: Eigen::Vector3d _pos3d; Eigen::Matrix3d _K; }; /组成图优化问题 void bundleAdjustmentG2O( const VecVector3d &points_3d, const VecVector2d &points_2d, const Mat &K, Sophus::SE3d &pose) { // 构建图优化,先设定g2o typedef g2o::BlockSolver<g2o::BlockSolverTraits<6, 3>> BlockSolverType; // pose is 6, landmark is 3 typedef g2o::LinearSolverDense<BlockSolverType::PoseMatrixType> LinearSolverType; // 线性求解器类型 // 梯度下降方法,可以从GN, LM, DogLeg 中选 auto solver = new g2o::OptimizationAlgorithmGaussNewton( g2o::make_unique<BlockSolverType>(g2o::make_unique<LinearSolverType>())); g2o::SparseOptimizer optimizer; // 图模型 optimizer.setAlgorithm(solver); // 设置求解器 optimizer.setVerbose(true); // 打开调试输出 // vertex VertexPose *vertex_pose = new VertexPose(); // camera vertex_pose vertex_pose->setId(0); vertex_pose->setEstimate(Sophus::SE3d()); optimizer.addVertex(vertex_pose); // K Eigen::Matrix3d K_eigen; K_eigen << K.at<double>(0, 0), K.at<double>(0, 1), K.at<double>(0, 2), K.at<double>(1, 0), K.at<double>(1, 1), K.at<double>(1, 2), K.at<double>(2, 0), K.at<double>(2, 1), K.at<double>(2, 2); // edges int index = 1; for (size_t i = 0; i < points_2d.size(); ++i) { auto p2d = points_2d[i]; auto p3d = points_3d[i]; EdgeProjection *edge = new EdgeProjection(p3d, K_eigen); edge->setId(index); edge->setVertex(0, vertex_pose); edge->setMeasurement(p2d); edge->setInformation(Eigen::Matrix2d::Identity()); optimizer.addEdge(edge); index++; } chrono::steady_clock::time_point t1 = chrono::steady_clock::now(); optimizer.setVerbose(true); optimizer.initializeOptimization(); optimizer.optimize(10); chrono::steady_clock::time_point t2 = chrono::steady_clock::now(); chrono::duration<double> time_used = chrono::duration_cast<chrono::duration<double>>(t2 - t1); cout << "optimization costs time: " << time_used.count() << " seconds." << endl; cout << "pose estimated by g2o =\n" << vertex_pose->estimate().matrix() << endl; pose = vertex_pose->estimate(); }
/实现顶点更新与边的误差计算 class VertexPose : public g2o::BaseVertex<6, Sophus::SE3d> { public: EIGEN_MAKE_ALIGNED_OPERATOR_NEW; virtual void setToOriginImpl() override { _estimate = Sophus::SE3d(); } /// left multiplication on SE3 virtual void oplusImpl(const double *update) override { Eigen::Matrix<double, 6, 1> update_eigen; update_eigen << update[0], update[1], update[2], update[3], update[4], update[5]; _estimate = Sophus::SE3d::exp(update_eigen) * _estimate; } virtual bool read(istream &in) override {} virtual bool write(ostream &out) const override {} }; class EdgeProjection : public g2o::BaseUnaryEdge<2, Eigen::Vector2d, VertexPose> { public: EIGEN_MAKE_ALIGNED_OPERATOR_NEW; EdgeProjection(const Eigen::Vector3d &pos, const Eigen::Matrix3d &K) : _pos3d(pos), _K(K) {} virtual void computeError() override { const VertexPose *v = static_cast<VertexPose *> (_vertices[0]); Sophus::SE3d T = v->estimate(); Eigen::Vector3d pos_pixel = _K * (T * _pos3d); pos_pixel /= pos_pixel[2]; _error = _measurement - pos_pixel.head<2>(); } virtual void linearizeOplus() override { const VertexPose *v = static_cast<VertexPose *> (_vertices[0]); Sophus::SE3d T = v->estimate(); Eigen::Vector3d pos_cam = T * _pos3d; double fx = _K(0, 0); double fy = _K(1, 1); double cx = _K(0, 2); double cy = _K(1, 2); double X = pos_cam[0]; double Y = pos_cam[1]; double Z = pos_cam[2]; double Z2 = Z * Z; _jacobianOplusXi << -fx / Z, 0, fx * X / Z2, fx * X * Y / Z2, -fx - fx * X * X / Z2, fx * Y / Z, 0, -fy / Z, fy * Y / (Z * Z), fy + fy * Y * Y / Z2, -fy * X * Y / Z2, -fy * X / Z; } virtual bool read(istream &in) override {} virtual bool write(ostream &out) const override {} private: Eigen::Vector3d _pos3d; Eigen::Matrix3d _K; }; /组成图优化问题 void bundleAdjustmentG2O( const VecVector3d &points_3d, const VecVector2d &points_2d, const Mat &K, Sophus::SE3d &pose) { // 构建图优化,先设定g2o typedef g2o::BlockSolver<g2o::BlockSolverTraits<6, 3>> BlockSolverType; // pose is 6, landmark is 3 typedef g2o::LinearSolverDense<BlockSolverType::PoseMatrixType> LinearSolverType; // 线性求解器类型 // 梯度下降方法,可以从GN, LM, DogLeg 中选 auto solver = new g2o::OptimizationAlgorithmGaussNewton( g2o::make_unique<BlockSolverType>(g2o::make_unique<LinearSolverType>())); g2o::SparseOptimizer optimizer; // 图模型 optimizer.setAlgorithm(solver); // 设置求解器 optimizer.setVerbose(true); // 打开调试输出 // vertex VertexPose *vertex_pose = new VertexPose(); // camera vertex_pose vertex_pose->setId(0); vertex_pose->setEstimate(Sophus::SE3d()); optimizer.addVertex(vertex_pose); // K Eigen::Matrix3d K_eigen; K_eigen << K.at<double>(0, 0), K.at<double>(0, 1), K.at<double>(0, 2), K.at<double>(1, 0), K.at<double>(1, 1), K.at<double>(1, 2), K.at<double>(2, 0), K.at<double>(2, 1), K.at<double>(2, 2); // edges int index = 1; for (size_t i = 0; i < points_2d.size(); ++i) { auto p2d = points_2d[i]; auto p3d = points_3d[i]; EdgeProjection *edge = new EdgeProjection(p3d, K_eigen); edge->setId(index); edge->setVertex(0, vertex_pose); edge->setMeasurement(p2d); edge->setInformation(Eigen::Matrix2d::Identity()); optimizer.addEdge(edge); index++; } chrono::steady_clock::time_point t1 = chrono::steady_clock::now(); optimizer.setVerbose(true); optimizer.initializeOptimization(); optimizer.optimize(10); chrono::steady_clock::time_point t2 = chrono::steady_clock::now(); chrono::duration<double> time_used = chrono::duration_cast<chrono::duration<double>>(t2 - t1); cout << "optimization costs time: " << time_used.count() << " seconds." << endl; cout << "pose estimated by g2o =\n" << vertex_pose->estimate().matrix() << endl; pose = vertex_pose->estimate(); }
复制
/实现顶点更新与边的误差计算 class VertexPose : public g2o::BaseVertex<6, Sophus::SE3d> { public: EIGEN_MAKE_ALIGNED_OPERATOR_NEW; virtual void setToOriginImpl() override { _estimate = Sophus::SE3d(); } /// left multiplication on SE3 virtual void oplusImpl(const double *update) override { Eigen::Matrix<double, 6, 1> update_eigen; update_eigen << update[0], update[1], update[2], update[3], update[4], update[5]; _estimate = Sophus::SE3d::exp(update_eigen) * _estimate; } virtual bool read(istream &in) override {} virtual bool write(ostream &out) const override {} }; class EdgeProjection : public g2o::BaseUnaryEdge<2, Eigen::Vector2d, VertexPose> { public: EIGEN_MAKE_ALIGNED_OPERATOR_NEW; EdgeProjection(const Eigen::Vector3d &pos, const Eigen::Matrix3d &K) : _pos3d(pos), _K(K) {} virtual void computeError() override { const VertexPose *v = static_cast<VertexPose *> (_vertices[0]); Sophus::SE3d T = v->estimate(); Eigen::Vector3d pos_pixel = _K * (T * _pos3d); pos_pixel /= pos_pixel[2]; _error = _measurement - pos_pixel.head<2>(); } virtual void linearizeOplus() override { const VertexPose *v = static_cast<VertexPose *> (_vertices[0]); Sophus::SE3d T = v->estimate(); Eigen::Vector3d pos_cam = T * _pos3d; double fx = _K(0, 0); double fy = _K(1, 1); double cx = _K(0, 2); double cy = _K(1, 2); double X = pos_cam[0]; double Y = pos_cam[1]; double Z = pos_cam[2]; double Z2 = Z * Z; _jacobianOplusXi << -fx / Z, 0, fx * X / Z2, fx * X * Y / Z2, -fx - fx * X * X / Z2, fx * Y / Z, 0, -fy / Z, fy * Y / (Z * Z), fy + fy * Y * Y / Z2, -fy * X * Y / Z2, -fy * X / Z; } virtual bool read(istream &in) override {} virtual bool write(ostream &out) const override {} private: Eigen::Vector3d _pos3d; Eigen::Matrix3d _K; }; /组成图优化问题 void bundleAdjustmentG2O( const VecVector3d &points_3d, const VecVector2d &points_2d, const Mat &K, Sophus::SE3d &pose) { // 构建图优化,先设定g2o typedef g2o::BlockSolver<g2o::BlockSolverTraits<6, 3>> BlockSolverType; // pose is 6, landmark is 3 typedef g2o::LinearSolverDense<BlockSolverType::PoseMatrixType> LinearSolverType; // 线性求解器类型 // 梯度下降方法,可以从GN, LM, DogLeg 中选 auto solver = new g2o::OptimizationAlgorithmGaussNewton( g2o::make_unique<BlockSolverType>(g2o::make_unique<LinearSolverType>())); g2o::SparseOptimizer optimizer; // 图模型 optimizer.setAlgorithm(solver); // 设置求解器 optimizer.setVerbose(true); // 打开调试输出 // vertex VertexPose *vertex_pose = new VertexPose(); // camera vertex_pose vertex_pose->setId(0); vertex_pose->setEstimate(Sophus::SE3d()); optimizer.addVertex(vertex_pose); // K Eigen::Matrix3d K_eigen; K_eigen << K.at<double>(0, 0), K.at<double>(0, 1), K.at<double>(0, 2), K.at<double>(1, 0), K.at<double>(1, 1), K.at<double>(1, 2), K.at<double>(2, 0), K.at<double>(2, 1), K.at<double>(2, 2); // edges int index = 1; for (size_t i = 0; i < points_2d.size(); ++i) { auto p2d = points_2d[i]; auto p3d = points_3d[i]; EdgeProjection *edge = new EdgeProjection(p3d, K_eigen); edge->setId(index); edge->setVertex(0, vertex_pose); edge->setMeasurement(p2d); edge->setInformation(Eigen::Matrix2d::Identity()); optimizer.addEdge(edge); index++; } chrono::steady_clock::time_point t1 = chrono::steady_clock::now(); optimizer.setVerbose(true); optimizer.initializeOptimization(); optimizer.optimize(10); chrono::steady_clock::time_point t2 = chrono::steady_clock::now(); chrono::duration<double> time_used = chrono::duration_cast<chrono::duration<double>>(t2 - t1); cout << "optimization costs time: " << time_used.count() << " seconds." << endl; cout << "pose estimated by g2o =\n" << vertex_pose->estimate().matrix() << endl; pose = vertex_pose->estimate(); }
复制
复制
复制
7.8.1 使用EPnP 位姿
3D-3D: ICP理论部分参考博客:
3D-3D: ICP理论部分参考博客:
ICP算法与Kdtree
7.9.2 非线性优化方法
编译运行代码结果如下:
[ INFO:0] Initialize OpenCL runtime...
-- Max dist : 95.000000
-- Min dist : 7.000000
一共找到了81组匹配点
3d-3d pairs: 75
W= 11.8688 -0.717698 1.89486
-1.88065 3.83391 -5.78219
3.25846 -5.82734 9.65267
U= 0.592295 -0.805658 -0.0101195
-0.418171 -0.318113 0.850845
0.688709 0.499719 0.525319
V= 0.64736 -0.761401 -0.0345329
-0.388765 -0.368829 0.844291
0.655581 0.533135 0.534772
ICP via SVD results:
R = [0.9972065647956201, 0.05834273442898391, -0.04663895869192625;
-0.05787745545449196, 0.998260122172866, 0.01126626067193237;
0.04721511705620757, -0.008535444848613793, 0.9988482762174666]
t = [0.1379879629890433;
-0.06551699470729988;
-0.02981649388290575]
R_inv = [0.9972065647956201, -0.05787745545449196, 0.04721511705620757;
0.05834273442898391, 0.998260122172866, -0.008535444848613793;
-0.04663895869192625, 0.01126626067193237, 0.9988482762174666]
t_inv = [-0.1399866702492459;
0.05709791102272541;
0.03695589996443214]
calling bundle adjustment
[ INFO:0] Initialize OpenCL runtime... -- Max dist : 95.000000 -- Min dist : 7.000000 一共找到了81组匹配点 3d-3d pairs: 75 W= 11.8688 -0.717698 1.89486 -1.88065 3.83391 -5.78219 3.25846 -5.82734 9.65267 U= 0.592295 -0.805658 -0.0101195 -0.418171 -0.318113 0.850845 0.688709 0.499719 0.525319 V= 0.64736 -0.761401 -0.0345329 -0.388765 -0.368829 0.844291 0.655581 0.533135 0.534772 ICP via SVD results: R = [0.9972065647956201, 0.05834273442898391, -0.04663895869192625; -0.05787745545449196, 0.998260122172866, 0.01126626067193237; 0.04721511705620757, -0.008535444848613793, 0.9988482762174666] t = [0.1379879629890433; -0.06551699470729988; -0.02981649388290575] R_inv = [0.9972065647956201, -0.05787745545449196, 0.04721511705620757; 0.05834273442898391, 0.998260122172866, -0.008535444848613793; -0.04663895869192625, 0.01126626067193237, 0.9988482762174666] t_inv = [-0.1399866702492459; 0.05709791102272541; 0.03695589996443214] calling bundle adjustment
[ INFO:0] Initialize OpenCL runtime... -- Max dist : 95.000000 -- Min dist : 7.000000 一共找到了81组匹配点 3d-3d pairs: 75 W= 11.8688 -0.717698 1.89486 -1.88065 3.83391 -5.78219 3.25846 -5.82734 9.65267 U= 0.592295 -0.805658 -0.0101195 -0.418171 -0.318113 0.850845 0.688709 0.499719 0.525319 V= 0.64736 -0.761401 -0.0345329 -0.388765 -0.368829 0.844291 0.655581 0.533135 0.534772 ICP via SVD results: R = [0.9972065647956201, 0.05834273442898391, -0.04663895869192625; -0.05787745545449196, 0.998260122172866, 0.01126626067193237; 0.04721511705620757, -0.008535444848613793, 0.9988482762174666] t = [0.1379879629890433; -0.06551699470729988; -0.02981649388290575] R_inv = [0.9972065647956201, -0.05787745545449196, 0.04721511705620757; 0.05834273442898391, 0.998260122172866, -0.008535444848613793; -0.04663895869192625, 0.01126626067193237, 0.9988482762174666] t_inv = [-0.1399866702492459; 0.05709791102272541; 0.03695589996443214] calling bundle adjustment
复制
[ INFO:0] Initialize OpenCL runtime... -- Max dist : 95.000000 -- Min dist : 7.000000 一共找到了81组匹配点 3d-3d pairs: 75 W= 11.8688 -0.717698 1.89486 -1.88065 3.83391 -5.78219 3.25846 -5.82734 9.65267 U= 0.592295 -0.805658 -0.0101195 -0.418171 -0.318113 0.850845 0.688709 0.499719 0.525319 V= 0.64736 -0.761401 -0.0345329 -0.388765 -0.368829 0.844291 0.655581 0.533135 0.534772 ICP via SVD results: R = [0.9972065647956201, 0.05834273442898391, -0.04663895869192625; -0.05787745545449196, 0.998260122172866, 0.01126626067193237; 0.04721511705620757, -0.008535444848613793, 0.9988482762174666] t = [0.1379879629890433; -0.06551699470729988; -0.02981649388290575] R_inv = [0.9972065647956201, -0.05787745545449196, 0.04721511705620757; 0.05834273442898391, 0.998260122172866, -0.008535444848613793; -0.04663895869192625, 0.01126626067193237, 0.9988482762174666] t_inv = [-0.1399866702492459; 0.05709791102272541; 0.03695589996443214] calling bundle adjustment
复制
复制
复制
代码及注释如下:
pose_estimation_3d3d(pts1, pts2, R, t);
cout << "ICP via SVD results: " << endl;
cout << "R = " << R << endl;
cout << "t = " << t << endl;
cout << "R_inv = " << R.t() << endl;
cout << "t_inv = " << -R.t() * t << endl;
cout << "calling bundle adjustment" << endl;
bundleAdjustment(pts1, pts2, R, t);
// verify p1 = R * p2 + t
for (int i = 0; i < 5; i++) {
cout << "p1 = " << pts1[i] << endl;
cout << "p2 = " << pts2[i] << endl;
cout << "(R*p2+t) = " <<
R * (Mat_<double>(3, 1) << pts2[i].x, pts2[i].y, pts2[i].z) + t
<< endl;
cout << endl;
}
}
void find_feature_matches(const Mat &img_1, const Mat &img_2,
std::vector<KeyPoint> &keypoints_1,
std::vector<KeyPoint> &keypoints_2,
std::vector<DMatch> &matches) {
//-- 初始化
Mat descriptors_1, descriptors_2;
// used in OpenCV3
Ptr<FeatureDetector> detector = ORB::create();
Ptr<DescriptorExtractor> descriptor = ORB::create();
// use this if you are in OpenCV2
// Ptr<FeatureDetector> detector = FeatureDetector::create ( "ORB" );
// Ptr<DescriptorExtractor> descriptor = DescriptorExtractor::create ( "ORB" );
Ptr<DescriptorMatcher> matcher = DescriptorMatcher::create("BruteForce-Hamming");
//-- 第一步:检测 Oriented FAST 角点位置
detector->detect(img_1, keypoints_1);
detector->detect(img_2, keypoints_2);
//-- 第二步:根据角点位置计算 BRIEF 描述子
descriptor->compute(img_1, keypoints_1, descriptors_1);
descriptor->compute(img_2, keypoints_2, descriptors_2);
//-- 第三步:对两幅图像中的BRIEF描述子进行匹配,使用 Hamming 距离
vector<DMatch> match;
// BFMatcher matcher ( NORM_HAMMING );
matcher->match(descriptors_1, descriptors_2, match);
//-- 第四步:匹配点对筛选
double min_dist = 10000, max_dist = 0;
//找出所有匹配之间的最小距离和最大距离, 即是最相似的和最不相似的两组点之间的距离
for (int i = 0; i < descriptors_1.rows; i++) {
double dist = match[i].distance;
if (dist < min_dist) min_dist = dist;
if (dist > max_dist) max_dist = dist;
}
printf("-- Max dist : %f \n", max_dist);
printf("-- Min dist : %f \n", min_dist);
//当描述子之间的距离大于两倍的最小距离时,即认为匹配有误.但有时候最小距离会非常小,设置一个经验值30作为下限.
for (int i = 0; i < descriptors_1.rows; i++) {
if (match[i].distance <= max(2 * min_dist, 30.0)) {
matches.push_back(match[i]);
}
}
}
Point2d pixel2cam(const Point2d &p, const Mat &K) {
return Point2d(
(p.x - K.at<double>(0, 2)) / K.at<double>(0, 0),
(p.y - K.at<double>(1, 2)) / K.at<double>(1, 1)
);
}
void pose_estimation_3d3d(const vector<Point3f> &pts1,
const vector<Point3f> &pts2,
Mat &R, Mat &t) {
Point3f p1, p2; // center of mass
int N = pts1.size();
for (int i = 0; i < N; i++) {
p1 += pts1[i];
p2 += pts2[i];
}
p1 = Point3f(Vec3f(p1) / N);
p2 = Point3f(Vec3f(p2) / N);
vector<Point3f> q1(N), q2(N); // remove the center
for (int i = 0; i < N; i++) {
q1[i] = pts1[i] - p1;
q2[i] = pts2[i] - p2;
}
// compute q1*q2^T
Eigen::Matrix3d W = Eigen::Matrix3d::Zero();
for (int i = 0; i < N; i++) {
W += Eigen::Vector3d(q1[i].x, q1[i].y, q1[i].z) * Eigen::Vector3d(q2[i].x, q2[i].y, q2[i].z).transpose();
}
cout << "W=" << W << endl;
// SVD on W
Eigen::JacobiSVD<Eigen::Matrix3d> svd(W, Eigen::ComputeFullU | Eigen::ComputeFullV);
Eigen::Matrix3d U = svd.matrixU();
Eigen::Matrix3d V = svd.matrixV();
cout << "U=" << U << endl;
cout << "V=" << V << endl;
Eigen::Matrix3d R_ = U * (V.transpose());
if (R_.determinant() < 0) {
R_ = -R_;
}
Eigen::Vector3d t_ = Eigen::Vector3d(p1.x, p1.y, p1.z) - R_ * Eigen::Vector3d(p2.x, p2.y, p2.z);
// convert to cv::Mat
R = (Mat_<double>(3, 3) <<
R_(0, 0), R_(0, 1), R_(0, 2),
R_(1, 0), R_(1, 1), R_(1, 2),
R_(2, 0), R_(2, 1), R_(2, 2)
);
t = (Mat_<double>(3, 1) << t_(0, 0), t_(1, 0), t_(2, 0));
}
pose_estimation_3d3d(pts1, pts2, R, t); cout << "ICP via SVD results: " << endl; cout << "R = " << R << endl; cout << "t = " << t << endl; cout << "R_inv = " << R.t() << endl; cout << "t_inv = " << -R.t() * t << endl; cout << "calling bundle adjustment" << endl; bundleAdjustment(pts1, pts2, R, t); // verify p1 = R * p2 + t for (int i = 0; i < 5; i++) { cout << "p1 = " << pts1[i] << endl; cout << "p2 = " << pts2[i] << endl; cout << "(R*p2+t) = " << R * (Mat_<double>(3, 1) << pts2[i].x, pts2[i].y, pts2[i].z) + t << endl; cout << endl; } } void find_feature_matches(const Mat &img_1, const Mat &img_2, std::vector<KeyPoint> &keypoints_1, std::vector<KeyPoint> &keypoints_2, std::vector<DMatch> &matches) { //-- 初始化 Mat descriptors_1, descriptors_2; // used in OpenCV3 Ptr<FeatureDetector> detector = ORB::create(); Ptr<DescriptorExtractor> descriptor = ORB::create(); // use this if you are in OpenCV2 // Ptr<FeatureDetector> detector = FeatureDetector::create ( "ORB" ); // Ptr<DescriptorExtractor> descriptor = DescriptorExtractor::create ( "ORB" ); Ptr<DescriptorMatcher> matcher = DescriptorMatcher::create("BruteForce-Hamming"); //-- 第一步:检测 Oriented FAST 角点位置 detector->detect(img_1, keypoints_1); detector->detect(img_2, keypoints_2); //-- 第二步:根据角点位置计算 BRIEF 描述子 descriptor->compute(img_1, keypoints_1, descriptors_1); descriptor->compute(img_2, keypoints_2, descriptors_2); //-- 第三步:对两幅图像中的BRIEF描述子进行匹配,使用 Hamming 距离 vector<DMatch> match; // BFMatcher matcher ( NORM_HAMMING ); matcher->match(descriptors_1, descriptors_2, match); //-- 第四步:匹配点对筛选 double min_dist = 10000, max_dist = 0; //找出所有匹配之间的最小距离和最大距离, 即是最相似的和最不相似的两组点之间的距离 for (int i = 0; i < descriptors_1.rows; i++) { double dist = match[i].distance; if (dist < min_dist) min_dist = dist; if (dist > max_dist) max_dist = dist; } printf("-- Max dist : %f \n", max_dist); printf("-- Min dist : %f \n", min_dist); //当描述子之间的距离大于两倍的最小距离时,即认为匹配有误.但有时候最小距离会非常小,设置一个经验值30作为下限. for (int i = 0; i < descriptors_1.rows; i++) { if (match[i].distance <= max(2 * min_dist, 30.0)) { matches.push_back(match[i]); } } } Point2d pixel2cam(const Point2d &p, const Mat &K) { return Point2d( (p.x - K.at<double>(0, 2)) / K.at<double>(0, 0), (p.y - K.at<double>(1, 2)) / K.at<double>(1, 1) ); } void pose_estimation_3d3d(const vector<Point3f> &pts1, const vector<Point3f> &pts2, Mat &R, Mat &t) { Point3f p1, p2; // center of mass int N = pts1.size(); for (int i = 0; i < N; i++) { p1 += pts1[i]; p2 += pts2[i]; } p1 = Point3f(Vec3f(p1) / N); p2 = Point3f(Vec3f(p2) / N); vector<Point3f> q1(N), q2(N); // remove the center for (int i = 0; i < N; i++) { q1[i] = pts1[i] - p1; q2[i] = pts2[i] - p2; } // compute q1*q2^T Eigen::Matrix3d W = Eigen::Matrix3d::Zero(); for (int i = 0; i < N; i++) { W += Eigen::Vector3d(q1[i].x, q1[i].y, q1[i].z) * Eigen::Vector3d(q2[i].x, q2[i].y, q2[i].z).transpose(); } cout << "W=" << W << endl; // SVD on W Eigen::JacobiSVD<Eigen::Matrix3d> svd(W, Eigen::ComputeFullU | Eigen::ComputeFullV); Eigen::Matrix3d U = svd.matrixU(); Eigen::Matrix3d V = svd.matrixV(); cout << "U=" << U << endl; cout << "V=" << V << endl; Eigen::Matrix3d R_ = U * (V.transpose()); if (R_.determinant() < 0) { R_ = -R_; } Eigen::Vector3d t_ = Eigen::Vector3d(p1.x, p1.y, p1.z) - R_ * Eigen::Vector3d(p2.x, p2.y, p2.z); // convert to cv::Mat R = (Mat_<double>(3, 3) << R_(0, 0), R_(0, 1), R_(0, 2), R_(1, 0), R_(1, 1), R_(1, 2), R_(2, 0), R_(2, 1), R_(2, 2) ); t = (Mat_<double>(3, 1) << t_(0, 0), t_(1, 0), t_(2, 0)); }
pose_estimation_3d3d(pts1, pts2, R, t); cout << "ICP via SVD results: " << endl; cout << "R = " << R << endl; cout << "t = " << t << endl; cout << "R_inv = " << R.t() << endl; cout << "t_inv = " << -R.t() * t << endl; cout << "calling bundle adjustment" << endl; bundleAdjustment(pts1, pts2, R, t); // verify p1 = R * p2 + t for (int i = 0; i < 5; i++) { cout << "p1 = " << pts1[i] << endl; cout << "p2 = " << pts2[i] << endl; cout << "(R*p2+t) = " << R * (Mat_<double>(3, 1) << pts2[i].x, pts2[i].y, pts2[i].z) + t << endl; cout << endl; } } void find_feature_matches(const Mat &img_1, const Mat &img_2, std::vector<KeyPoint> &keypoints_1, std::vector<KeyPoint> &keypoints_2, std::vector<DMatch> &matches) { //-- 初始化 Mat descriptors_1, descriptors_2; // used in OpenCV3 Ptr<FeatureDetector> detector = ORB::create(); Ptr<DescriptorExtractor> descriptor = ORB::create(); // use this if you are in OpenCV2 // Ptr<FeatureDetector> detector = FeatureDetector::create ( "ORB" ); // Ptr<DescriptorExtractor> descriptor = DescriptorExtractor::create ( "ORB" ); Ptr<DescriptorMatcher> matcher = DescriptorMatcher::create("BruteForce-Hamming"); //-- 第一步:检测 Oriented FAST 角点位置 detector->detect(img_1, keypoints_1); detector->detect(img_2, keypoints_2); //-- 第二步:根据角点位置计算 BRIEF 描述子 descriptor->compute(img_1, keypoints_1, descriptors_1); descriptor->compute(img_2, keypoints_2, descriptors_2); //-- 第三步:对两幅图像中的BRIEF描述子进行匹配,使用 Hamming 距离 vector<DMatch> match; // BFMatcher matcher ( NORM_HAMMING ); matcher->match(descriptors_1, descriptors_2, match); //-- 第四步:匹配点对筛选 double min_dist = 10000, max_dist = 0; //找出所有匹配之间的最小距离和最大距离, 即是最相似的和最不相似的两组点之间的距离 for (int i = 0; i < descriptors_1.rows; i++) { double dist = match[i].distance; if (dist < min_dist) min_dist = dist; if (dist > max_dist) max_dist = dist; } printf("-- Max dist : %f \n", max_dist); printf("-- Min dist : %f \n", min_dist); //当描述子之间的距离大于两倍的最小距离时,即认为匹配有误.但有时候最小距离会非常小,设置一个经验值30作为下限. for (int i = 0; i < descriptors_1.rows; i++) { if (match[i].distance <= max(2 * min_dist, 30.0)) { matches.push_back(match[i]); } } } Point2d pixel2cam(const Point2d &p, const Mat &K) { return Point2d( (p.x - K.at<double>(0, 2)) / K.at<double>(0, 0), (p.y - K.at<double>(1, 2)) / K.at<double>(1, 1) ); } void pose_estimation_3d3d(const vector<Point3f> &pts1, const vector<Point3f> &pts2, Mat &R, Mat &t) { Point3f p1, p2; // center of mass int N = pts1.size(); for (int i = 0; i < N; i++) { p1 += pts1[i]; p2 += pts2[i]; } p1 = Point3f(Vec3f(p1) / N); p2 = Point3f(Vec3f(p2) / N); vector<Point3f> q1(N), q2(N); // remove the center for (int i = 0; i < N; i++) { q1[i] = pts1[i] - p1; q2[i] = pts2[i] - p2; } // compute q1*q2^T Eigen::Matrix3d W = Eigen::Matrix3d::Zero(); for (int i = 0; i < N; i++) { W += Eigen::Vector3d(q1[i].x, q1[i].y, q1[i].z) * Eigen::Vector3d(q2[i].x, q2[i].y, q2[i].z).transpose(); } cout << "W=" << W << endl; // SVD on W Eigen::JacobiSVD<Eigen::Matrix3d> svd(W, Eigen::ComputeFullU | Eigen::ComputeFullV); Eigen::Matrix3d U = svd.matrixU(); Eigen::Matrix3d V = svd.matrixV(); cout << "U=" << U << endl; cout << "V=" << V << endl; Eigen::Matrix3d R_ = U * (V.transpose()); if (R_.determinant() < 0) { R_ = -R_; } Eigen::Vector3d t_ = Eigen::Vector3d(p1.x, p1.y, p1.z) - R_ * Eigen::Vector3d(p2.x, p2.y, p2.z); // convert to cv::Mat R = (Mat_<double>(3, 3) << R_(0, 0), R_(0, 1), R_(0, 2), R_(1, 0), R_(1, 1), R_(1, 2), R_(2, 0), R_(2, 1), R_(2, 2) ); t = (Mat_<double>(3, 1) << t_(0, 0), t_(1, 0), t_(2, 0)); }
复制
pose_estimation_3d3d(pts1, pts2, R, t); cout << "ICP via SVD results: " << endl; cout << "R = " << R << endl; cout << "t = " << t << endl; cout << "R_inv = " << R.t() << endl; cout << "t_inv = " << -R.t() * t << endl; cout << "calling bundle adjustment" << endl; bundleAdjustment(pts1, pts2, R, t); // verify p1 = R * p2 + t for (int i = 0; i < 5; i++) { cout << "p1 = " << pts1[i] << endl; cout << "p2 = " << pts2[i] << endl; cout << "(R*p2+t) = " << R * (Mat_<double>(3, 1) << pts2[i].x, pts2[i].y, pts2[i].z) + t << endl; cout << endl; } } void find_feature_matches(const Mat &img_1, const Mat &img_2, std::vector<KeyPoint> &keypoints_1, std::vector<KeyPoint> &keypoints_2, std::vector<DMatch> &matches) { //-- 初始化 Mat descriptors_1, descriptors_2; // used in OpenCV3 Ptr<FeatureDetector> detector = ORB::create(); Ptr<DescriptorExtractor> descriptor = ORB::create(); // use this if you are in OpenCV2 // Ptr<FeatureDetector> detector = FeatureDetector::create ( "ORB" ); // Ptr<DescriptorExtractor> descriptor = DescriptorExtractor::create ( "ORB" ); Ptr<DescriptorMatcher> matcher = DescriptorMatcher::create("BruteForce-Hamming"); //-- 第一步:检测 Oriented FAST 角点位置 detector->detect(img_1, keypoints_1); detector->detect(img_2, keypoints_2); //-- 第二步:根据角点位置计算 BRIEF 描述子 descriptor->compute(img_1, keypoints_1, descriptors_1); descriptor->compute(img_2, keypoints_2, descriptors_2); //-- 第三步:对两幅图像中的BRIEF描述子进行匹配,使用 Hamming 距离 vector<DMatch> match; // BFMatcher matcher ( NORM_HAMMING ); matcher->match(descriptors_1, descriptors_2, match); //-- 第四步:匹配点对筛选 double min_dist = 10000, max_dist = 0; //找出所有匹配之间的最小距离和最大距离, 即是最相似的和最不相似的两组点之间的距离 for (int i = 0; i < descriptors_1.rows; i++) { double dist = match[i].distance; if (dist < min_dist) min_dist = dist; if (dist > max_dist) max_dist = dist; } printf("-- Max dist : %f \n", max_dist); printf("-- Min dist : %f \n", min_dist); //当描述子之间的距离大于两倍的最小距离时,即认为匹配有误.但有时候最小距离会非常小,设置一个经验值30作为下限. for (int i = 0; i < descriptors_1.rows; i++) { if (match[i].distance <= max(2 * min_dist, 30.0)) { matches.push_back(match[i]); } } } Point2d pixel2cam(const Point2d &p, const Mat &K) { return Point2d( (p.x - K.at<double>(0, 2)) / K.at<double>(0, 0), (p.y - K.at<double>(1, 2)) / K.at<double>(1, 1) ); } void pose_estimation_3d3d(const vector<Point3f> &pts1, const vector<Point3f> &pts2, Mat &R, Mat &t) { Point3f p1, p2; // center of mass int N = pts1.size(); for (int i = 0; i < N; i++) { p1 += pts1[i]; p2 += pts2[i]; } p1 = Point3f(Vec3f(p1) / N); p2 = Point3f(Vec3f(p2) / N); vector<Point3f> q1(N), q2(N); // remove the center for (int i = 0; i < N; i++) { q1[i] = pts1[i] - p1; q2[i] = pts2[i] - p2; } // compute q1*q2^T Eigen::Matrix3d W = Eigen::Matrix3d::Zero(); for (int i = 0; i < N; i++) { W += Eigen::Vector3d(q1[i].x, q1[i].y, q1[i].z) * Eigen::Vector3d(q2[i].x, q2[i].y, q2[i].z).transpose(); } cout << "W=" << W << endl; // SVD on W Eigen::JacobiSVD<Eigen::Matrix3d> svd(W, Eigen::ComputeFullU | Eigen::ComputeFullV); Eigen::Matrix3d U = svd.matrixU(); Eigen::Matrix3d V = svd.matrixV(); cout << "U=" << U << endl; cout << "V=" << V << endl; Eigen::Matrix3d R_ = U * (V.transpose()); if (R_.determinant() < 0) { R_ = -R_; } Eigen::Vector3d t_ = Eigen::Vector3d(p1.x, p1.y, p1.z) - R_ * Eigen::Vector3d(p2.x, p2.y, p2.z); // convert to cv::Mat R = (Mat_<double>(3, 3) << R_(0, 0), R_(0, 1), R_(0, 2), R_(1, 0), R_(1, 1), R_(1, 2), R_(2, 0), R_(2, 1), R_(2, 2) ); t = (Mat_<double>(3, 1) << t_(0, 0), t_(1, 0), t_(2, 0)); }
复制
复制
复制
7.10.2 实践:非线性优化方法
编译运行代码结果如下:
iteration= 0 chi2= 1.815772 time= 2.7424e-05 cumTime= 2.7424e-05 edges= 75 schur= 0 lambda= 0.000787 levenbergIter= 1
iteration= 1 chi2= 1.815193 time= 1.3543e-05 cumTime= 4.0967e-05 edges= 75 schur= 0 lambda= 0.000524 levenbergIter= 1
iteration= 2 chi2= 1.815193 time= 1.2344e-05 cumTime= 5.3311e-05 edges= 75 schur= 0 lambda= 0.000350 levenbergIter= 1
iteration= 3 chi2= 1.815193 time= 1.2062e-05 cumTime= 6.5373e-05 edges= 75 schur= 0 lambda= 0.000233 levenbergIter= 1
iteration= 4 chi2= 1.815193 time= 1.2225e-05 cumTime= 7.7598e-05 edges= 75 schur= 0 lambda= 0.000155 levenbergIter= 1
iteration= 5 chi2= 1.815193 time= 1.7876e-05 cumTime= 9.5474e-05 edges= 75 schur= 0 lambda= 0.000829 levenbergIter= 3
iteration= 6 chi2= 1.815193 time= 1.1872e-05 cumTime= 0.000107346 edges= 75 schur= 0 lambda= 0.001657 levenbergIter= 1
optimization costs time: 0.000329077 seconds.
after optimization:
T=
0.997207 0.0583427 -0.046639 0.137988
-0.0578775 0.99826 0.0112663 -0.065517
0.0472151 -0.00853546 0.998848 -0.0298169
0 0 0 1
p1 = [-0.0374123, -0.830816, 2.7448]
p2 = [-0.0111479, -0.746763, 2.7652]
(R*p2+t) = [-0.04566297853353579;
-0.7791822357027391;
2.738045920497219]
p1 = [-0.243698, -0.117719, 1.5848]
p2 = [-0.299118, -0.0975683, 1.6558]
(R*p2+t) = [-0.2432120339103851;
-0.126948636385738;
1.610785991401685]
p1 = [-0.627753, 0.160186, 1.3396]
p2 = [-0.709645, 0.159033, 1.4212]
(R*p2+t) = [-0.6266796581943102;
0.1503228882936767;
1.354882969168255]
p1 = [-0.323443, 0.104873, 1.4266]
p2 = [-0.399079, 0.12047, 1.4838]
(R*p2+t) = [-0.3221508326762042;
0.09455769417917799;
1.432403439105304]
p1 = [-0.627221, 0.101454, 1.3116]
p2 = [-0.709709, 0.100216, 1.3998]
(R*p2+t) = [-0.6291763410391112;
0.09137124101732745;
1.334006553934159]
*** 正常退出 ***
iteration= 0 chi2= 1.815772 time= 2.7424e-05 cumTime= 2.7424e-05 edges= 75 schur= 0 lambda= 0.000787 levenbergIter= 1 iteration= 1 chi2= 1.815193 time= 1.3543e-05 cumTime= 4.0967e-05 edges= 75 schur= 0 lambda= 0.000524 levenbergIter= 1 iteration= 2 chi2= 1.815193 time= 1.2344e-05 cumTime= 5.3311e-05 edges= 75 schur= 0 lambda= 0.000350 levenbergIter= 1 iteration= 3 chi2= 1.815193 time= 1.2062e-05 cumTime= 6.5373e-05 edges= 75 schur= 0 lambda= 0.000233 levenbergIter= 1 iteration= 4 chi2= 1.815193 time= 1.2225e-05 cumTime= 7.7598e-05 edges= 75 schur= 0 lambda= 0.000155 levenbergIter= 1 iteration= 5 chi2= 1.815193 time= 1.7876e-05 cumTime= 9.5474e-05 edges= 75 schur= 0 lambda= 0.000829 levenbergIter= 3 iteration= 6 chi2= 1.815193 time= 1.1872e-05 cumTime= 0.000107346 edges= 75 schur= 0 lambda= 0.001657 levenbergIter= 1 optimization costs time: 0.000329077 seconds. after optimization: T= 0.997207 0.0583427 -0.046639 0.137988 -0.0578775 0.99826 0.0112663 -0.065517 0.0472151 -0.00853546 0.998848 -0.0298169 0 0 0 1 p1 = [-0.0374123, -0.830816, 2.7448] p2 = [-0.0111479, -0.746763, 2.7652] (R*p2+t) = [-0.04566297853353579; -0.7791822357027391; 2.738045920497219] p1 = [-0.243698, -0.117719, 1.5848] p2 = [-0.299118, -0.0975683, 1.6558] (R*p2+t) = [-0.2432120339103851; -0.126948636385738; 1.610785991401685] p1 = [-0.627753, 0.160186, 1.3396] p2 = [-0.709645, 0.159033, 1.4212] (R*p2+t) = [-0.6266796581943102; 0.1503228882936767; 1.354882969168255] p1 = [-0.323443, 0.104873, 1.4266] p2 = [-0.399079, 0.12047, 1.4838] (R*p2+t) = [-0.3221508326762042; 0.09455769417917799; 1.432403439105304] p1 = [-0.627221, 0.101454, 1.3116] p2 = [-0.709709, 0.100216, 1.3998] (R*p2+t) = [-0.6291763410391112; 0.09137124101732745; 1.334006553934159] *** 正常退出 ***
iteration= 0 chi2= 1.815772 time= 2.7424e-05 cumTime= 2.7424e-05 edges= 75 schur= 0 lambda= 0.000787 levenbergIter= 1 iteration= 1 chi2= 1.815193 time= 1.3543e-05 cumTime= 4.0967e-05 edges= 75 schur= 0 lambda= 0.000524 levenbergIter= 1 iteration= 2 chi2= 1.815193 time= 1.2344e-05 cumTime= 5.3311e-05 edges= 75 schur= 0 lambda= 0.000350 levenbergIter= 1 iteration= 3 chi2= 1.815193 time= 1.2062e-05 cumTime= 6.5373e-05 edges= 75 schur= 0 lambda= 0.000233 levenbergIter= 1 iteration= 4 chi2= 1.815193 time= 1.2225e-05 cumTime= 7.7598e-05 edges= 75 schur= 0 lambda= 0.000155 levenbergIter= 1 iteration= 5 chi2= 1.815193 time= 1.7876e-05 cumTime= 9.5474e-05 edges= 75 schur= 0 lambda= 0.000829 levenbergIter= 3 iteration= 6 chi2= 1.815193 time= 1.1872e-05 cumTime= 0.000107346 edges= 75 schur= 0 lambda= 0.001657 levenbergIter= 1 optimization costs time: 0.000329077 seconds. after optimization: T= 0.997207 0.0583427 -0.046639 0.137988 -0.0578775 0.99826 0.0112663 -0.065517 0.0472151 -0.00853546 0.998848 -0.0298169 0 0 0 1 p1 = [-0.0374123, -0.830816, 2.7448] p2 = [-0.0111479, -0.746763, 2.7652] (R*p2+t) = [-0.04566297853353579; -0.7791822357027391; 2.738045920497219] p1 = [-0.243698, -0.117719, 1.5848] p2 = [-0.299118, -0.0975683, 1.6558] (R*p2+t) = [-0.2432120339103851; -0.126948636385738; 1.610785991401685] p1 = [-0.627753, 0.160186, 1.3396] p2 = [-0.709645, 0.159033, 1.4212] (R*p2+t) = [-0.6266796581943102; 0.1503228882936767; 1.354882969168255] p1 = [-0.323443, 0.104873, 1.4266] p2 = [-0.399079, 0.12047, 1.4838] (R*p2+t) = [-0.3221508326762042; 0.09455769417917799; 1.432403439105304] p1 = [-0.627221, 0.101454, 1.3116] p2 = [-0.709709, 0.100216, 1.3998] (R*p2+t) = [-0.6291763410391112; 0.09137124101732745; 1.334006553934159] *** 正常退出 ***
复制
iteration= 0 chi2= 1.815772 time= 2.7424e-05 cumTime= 2.7424e-05 edges= 75 schur= 0 lambda= 0.000787 levenbergIter= 1 iteration= 1 chi2= 1.815193 time= 1.3543e-05 cumTime= 4.0967e-05 edges= 75 schur= 0 lambda= 0.000524 levenbergIter= 1 iteration= 2 chi2= 1.815193 time= 1.2344e-05 cumTime= 5.3311e-05 edges= 75 schur= 0 lambda= 0.000350 levenbergIter= 1 iteration= 3 chi2= 1.815193 time= 1.2062e-05 cumTime= 6.5373e-05 edges= 75 schur= 0 lambda= 0.000233 levenbergIter= 1 iteration= 4 chi2= 1.815193 time= 1.2225e-05 cumTime= 7.7598e-05 edges= 75 schur= 0 lambda= 0.000155 levenbergIter= 1 iteration= 5 chi2= 1.815193 time= 1.7876e-05 cumTime= 9.5474e-05 edges= 75 schur= 0 lambda= 0.000829 levenbergIter= 3 iteration= 6 chi2= 1.815193 time= 1.1872e-05 cumTime= 0.000107346 edges= 75 schur= 0 lambda= 0.001657 levenbergIter= 1 optimization costs time: 0.000329077 seconds. after optimization: T= 0.997207 0.0583427 -0.046639 0.137988 -0.0578775 0.99826 0.0112663 -0.065517 0.0472151 -0.00853546 0.998848 -0.0298169 0 0 0 1 p1 = [-0.0374123, -0.830816, 2.7448] p2 = [-0.0111479, -0.746763, 2.7652] (R*p2+t) = [-0.04566297853353579; -0.7791822357027391; 2.738045920497219] p1 = [-0.243698, -0.117719, 1.5848] p2 = [-0.299118, -0.0975683, 1.6558] (R*p2+t) = [-0.2432120339103851; -0.126948636385738; 1.610785991401685] p1 = [-0.627753, 0.160186, 1.3396] p2 = [-0.709645, 0.159033, 1.4212] (R*p2+t) = [-0.6266796581943102; 0.1503228882936767; 1.354882969168255] p1 = [-0.323443, 0.104873, 1.4266] p2 = [-0.399079, 0.12047, 1.4838] (R*p2+t) = [-0.3221508326762042; 0.09455769417917799; 1.432403439105304] p1 = [-0.627221, 0.101454, 1.3116] p2 = [-0.709709, 0.100216, 1.3998] (R*p2+t) = [-0.6291763410391112; 0.09137124101732745; 1.334006553934159] *** 正常退出 ***
复制
复制
复制
代码及注释如下:
class EdgeProjectXYZRGBDPoseOnly : public g2o::BaseUnaryEdge<3, Eigen::Vector3d, VertexPose> {
public:
EIGEN_MAKE_ALIGNED_OPERATOR_NEW;
EdgeProjectXYZRGBDPoseOnly(const Eigen::Vector3d &point) : _point(point) {}
virtual void computeError() override {
const VertexPose *pose = static_cast<const VertexPose *> ( _vertices[0] );
_error = _measurement - pose->estimate() * _point;
}
virtual void linearizeOplus() override {
VertexPose *pose = static_cast<VertexPose *>(_vertices[0]);
Sophus::SE3d T = pose->estimate();
Eigen::Vector3d xyz_trans = T * _point;
_jacobianOplusXi.block<3, 3>(0, 0) = -Eigen::Matrix3d::Identity();
_jacobianOplusXi.block<3, 3>(0, 3) = Sophus::SO3d::hat(xyz_trans);
}
bool read(istream &in) {}
bool write(ostream &out) const {}
protected:
Eigen::Vector3d _point;
};
class EdgeProjectXYZRGBDPoseOnly : public g2o::BaseUnaryEdge<3, Eigen::Vector3d, VertexPose> { public: EIGEN_MAKE_ALIGNED_OPERATOR_NEW; EdgeProjectXYZRGBDPoseOnly(const Eigen::Vector3d &point) : _point(point) {} virtual void computeError() override { const VertexPose *pose = static_cast<const VertexPose *> ( _vertices[0] ); _error = _measurement - pose->estimate() * _point; } virtual void linearizeOplus() override { VertexPose *pose = static_cast<VertexPose *>(_vertices[0]); Sophus::SE3d T = pose->estimate(); Eigen::Vector3d xyz_trans = T * _point; _jacobianOplusXi.block<3, 3>(0, 0) = -Eigen::Matrix3d::Identity(); _jacobianOplusXi.block<3, 3>(0, 3) = Sophus::SO3d::hat(xyz_trans); } bool read(istream &in) {} bool write(ostream &out) const {} protected: Eigen::Vector3d _point; };
class EdgeProjectXYZRGBDPoseOnly : public g2o::BaseUnaryEdge<3, Eigen::Vector3d, VertexPose> { public: EIGEN_MAKE_ALIGNED_OPERATOR_NEW; EdgeProjectXYZRGBDPoseOnly(const Eigen::Vector3d &point) : _point(point) {} virtual void computeError() override { const VertexPose *pose = static_cast<const VertexPose *> ( _vertices[0] ); _error = _measurement - pose->estimate() * _point; } virtual void linearizeOplus() override { VertexPose *pose = static_cast<VertexPose *>(_vertices[0]); Sophus::SE3d T = pose->estimate(); Eigen::Vector3d xyz_trans = T * _point; _jacobianOplusXi.block<3, 3>(0, 0) = -Eigen::Matrix3d::Identity(); _jacobianOplusXi.block<3, 3>(0, 3) = Sophus::SO3d::hat(xyz_trans); } bool read(istream &in) {} bool write(ostream &out) const {} protected: Eigen::Vector3d _point; };
复制
class EdgeProjectXYZRGBDPoseOnly : public g2o::BaseUnaryEdge<3, Eigen::Vector3d, VertexPose> { public: EIGEN_MAKE_ALIGNED_OPERATOR_NEW; EdgeProjectXYZRGBDPoseOnly(const Eigen::Vector3d &point) : _point(point) {} virtual void computeError() override { const VertexPose *pose = static_cast<const VertexPose *> ( _vertices[0] ); _error = _measurement - pose->estimate() * _point; } virtual void linearizeOplus() override { VertexPose *pose = static_cast<VertexPose *>(_vertices[0]); Sophus::SE3d T = pose->estimate(); Eigen::Vector3d xyz_trans = T * _point; _jacobianOplusXi.block<3, 3>(0, 0) = -Eigen::Matrix3d::Identity(); _jacobianOplusXi.block<3, 3>(0, 3) = Sophus::SO3d::hat(xyz_trans); } bool read(istream &in) {} bool write(ostream &out) const {} protected: Eigen::Vector3d _point; };
复制
复制
复制
BUG及调试
错误:
这里需要重新安装Sophus模板库,前面chp4代码比较简单,我用的而是非模板库,通过修改头文件 等方式也调试通过,但是为了之后章节调试的方便,我觉得定重新改用模板版库,安装之前记得将usr Sophus文件夹删除
sudo rm -rf /usr/local/include/sophus
sudo rm -rf /usr/local/lib/libSophus.so
locate Sophus //大小写有区别
locate sophus //查看一下有没有删除干净
sudo rm -rf /usr/local/include/sophus sudo rm -rf /usr/local/lib/libSophus.so locate Sophus //大小写有区别 locate sophus //查看一下有没有删除干净
sudo rm -rf /usr/local/include/sophus sudo rm -rf /usr/local/lib/libSophus.so locate Sophus //大小写有区别 locate sophus //查看一下有没有删除干净
复制
sudo rm -rf /usr/local/include/sophus sudo rm -rf /usr/local/lib/libSophus.so locate Sophus //大小写有区别 locate sophus //查看一下有没有删除干净
复制
复制
复制
安装模板库 代码:
git clone https://github.com/strasdat/Sophus.git
cd Sophus
mkdir build
cd build
cmake ..
make
sudo make install
git clone https://github.com/strasdat/Sophus.git cd Sophus mkdir build cd build cmake .. make sudo make install
git clone https://github.com/strasdat/Sophus.git cd Sophus mkdir build cd build cmake .. make sudo make install
复制
git clone https://github.com/strasdat/Sophus.git cd Sophus mkdir build cd build cmake .. make sudo make install
复制
复制
复制
error: static assertion failed: Cannot format an argument. To make type T formattable provide a formatter<T> specialization: https://fmt.dev/latest/api.html#udt
test/core/CMakeFiles/test_so2.dir/build.make:75: recipe for target 'test/core/CMakeFiles/test_so2.dir/test_so2.cpp.o' failed
make[2]: *** [test/core/CMakeFiles/test_so2.dir/test_so2.cpp.o] Error 1
CMakeFiles/Makefile2:235: recipe for target 'test/core/CMakeFiles/test_so2.dir/all' failed
make[1]: *** [test/core/CMakeFiles/test_so2.dir/all] Error 2
Makefile:145: recipe for target 'all' failed
error: static assertion failed: Cannot format an argument. To make type T formattable provide a formatter<T> specialization: https://fmt.dev/latest/api.html#udt test/core/CMakeFiles/test_so2.dir/build.make:75: recipe for target 'test/core/CMakeFiles/test_so2.dir/test_so2.cpp.o' failed make[2]: *** [test/core/CMakeFiles/test_so2.dir/test_so2.cpp.o] Error 1 CMakeFiles/Makefile2:235: recipe for target 'test/core/CMakeFiles/test_so2.dir/all' failed make[1]: *** [test/core/CMakeFiles/test_so2.dir/all] Error 2 Makefile:145: recipe for target 'all' failed
error: static assertion failed: Cannot format an argument. To make type T formattable provide a formatter<T> specialization: https://fmt.dev/latest/api.html#udt test/core/CMakeFiles/test_so2.dir/build.make:75: recipe for target 'test/core/CMakeFiles/test_so2.dir/test_so2.cpp.o' failed make[2]: *** [test/core/CMakeFiles/test_so2.dir/test_so2.cpp.o] Error 1 CMakeFiles/Makefile2:235: recipe for target 'test/core/CMakeFiles/test_so2.dir/all' failed make[1]: *** [test/core/CMakeFiles/test_so2.dir/all] Error 2 Makefile:145: recipe for target 'all' failed
复制
error: static assertion failed: Cannot format an argument. To make type T formattable provide a formatter<T> specialization: https://fmt.dev/latest/api.html#udt test/core/CMakeFiles/test_so2.dir/build.make:75: recipe for target 'test/core/CMakeFiles/test_so2.dir/test_so2.cpp.o' failed make[2]: *** [test/core/CMakeFiles/test_so2.dir/test_so2.cpp.o] Error 1 CMakeFiles/Makefile2:235: recipe for target 'test/core/CMakeFiles/test_so2.dir/all' failed make[1]: *** [test/core/CMakeFiles/test_so2.dir/all] Error 2 Makefile:145: recipe for target 'all' failed
复制
复制
复制
显然是fmt的问题,需要重新安装最新fmt8.1.1版本,下载网址如下 fmt8.1.1版本 ( PS):旧版本不用删除,直接安装 按照上面修改后,Sophus正常安装,后面编译运行ch7代码,又报了新的bug,看了一下是fmt的问题
CMakeFiles/pose_estimation_3d2d.dir/pose_estimation_3d2d.cpp.o:在函数‘fmt::v8::appender fmt::v8::detail::write<char, fmt::v8::appender>(fmt::v8::appender, fmt::v8::basic_string_view<fmt::v8::type_identity<char>::type>, fmt::v8::basic_format_specs<char> const&, fmt::v8::detail::locale_ref) [clone .isra.1436]’中:
pose_estimation_3d2d.cpp:(.text+0x4971):对‘fmt::v8::detail::error_handler::on_error(char const*)’未定义的引用
CMakeFiles/pose_estimation_3d2d.dir/pose_estimation_3d2d.cpp.o:在函数‘unsigned long long fmt::v8::detail::width_checker<fmt::v8::detail::error_handler>::operator()<float, 0>(float) [clone .isra.370]’中:
pose_estimation_3d2d.cpp:(.text.unlikely+0xf):对‘fmt::v8::detail::error_handler::on_error(char const*)’未定义的引用
CMakeFiles/pose_estimation_3d2d.dir/pose_estimation_3d2d.cpp.o:在函数‘unsigned long long fmt::v8::detail::precision_checker<fmt::v8::detail::error_handler>::operator()<float, 0>(float) [clone .isra.379]’中:
pose_estimation_3d2d.cpp:(.text.unlikely+0x23):对‘fmt::v8::detail::error_handler::on_error(char const*)’未定义的引用
CMakeFiles/pose_estimation_3d2d.dir/pose_estimation_3d2d.cpp.o:在函数‘Sophus::SO3Base<Sophus::SO3<double, 0> >::normalize() [clone .part.1296]’中:
pose_estimation_3d2d.cpp:(.text.unlikely+0x9a):对‘fmt::v8::vprint(fmt::v8::basic_string_view<char>, fmt::v8::basic_format_args<fmt::v8::basic_format_context<fmt::v8::appender, char> >)’未定义的引用
CMakeFiles/pose_estimation_3d2d.dir/pose_estimation_3d2d.cpp.o:在函数‘fmt::v8::appender fmt::v8::detail::write<char, fmt::v8::appender>(fmt::v8::appender, fmt::v8::basic_string_view<fmt::v8::type_identity<char>::type>, fmt::v8::basic_format_specs<char> const&, fmt::v8::detail::locale_ref) [clone .isra.1436]’中: pose_estimation_3d2d.cpp:(.text+0x4971):对‘fmt::v8::detail::error_handler::on_error(char const*)’未定义的引用 CMakeFiles/pose_estimation_3d2d.dir/pose_estimation_3d2d.cpp.o:在函数‘unsigned long long fmt::v8::detail::width_checker<fmt::v8::detail::error_handler>::operator()<float, 0>(float) [clone .isra.370]’中: pose_estimation_3d2d.cpp:(.text.unlikely+0xf):对‘fmt::v8::detail::error_handler::on_error(char const*)’未定义的引用 CMakeFiles/pose_estimation_3d2d.dir/pose_estimation_3d2d.cpp.o:在函数‘unsigned long long fmt::v8::detail::precision_checker<fmt::v8::detail::error_handler>::operator()<float, 0>(float) [clone .isra.379]’中: pose_estimation_3d2d.cpp:(.text.unlikely+0x23):对‘fmt::v8::detail::error_handler::on_error(char const*)’未定义的引用 CMakeFiles/pose_estimation_3d2d.dir/pose_estimation_3d2d.cpp.o:在函数‘Sophus::SO3Base<Sophus::SO3<double, 0> >::normalize() [clone .part.1296]’中: pose_estimation_3d2d.cpp:(.text.unlikely+0x9a):对‘fmt::v8::vprint(fmt::v8::basic_string_view<char>, fmt::v8::basic_format_args<fmt::v8::basic_format_context<fmt::v8::appender, char> >)’未定义的引用
复制
复制
解决方案参考如下博客:
视觉slam十四讲(第二版)之第七讲:pose_estimation_3d2d、pose_estimation_3d3d报错解决方案
全部改完之后,就能正常运行了,结果如下:


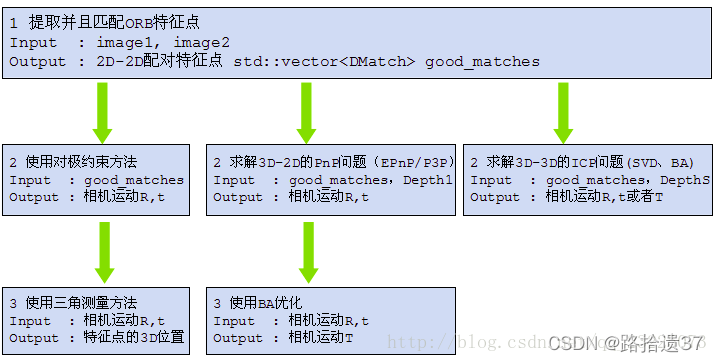
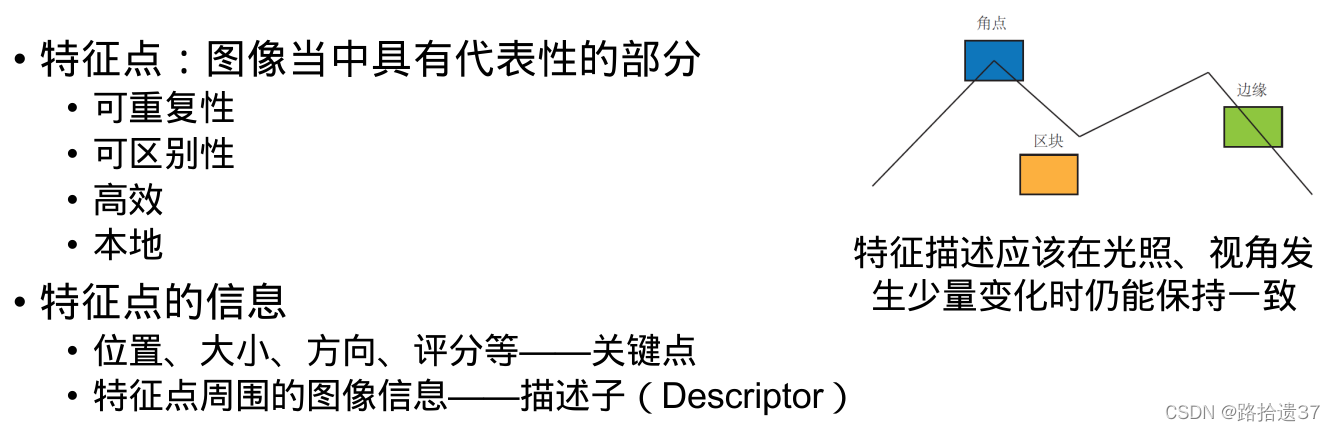
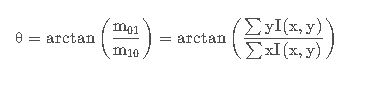

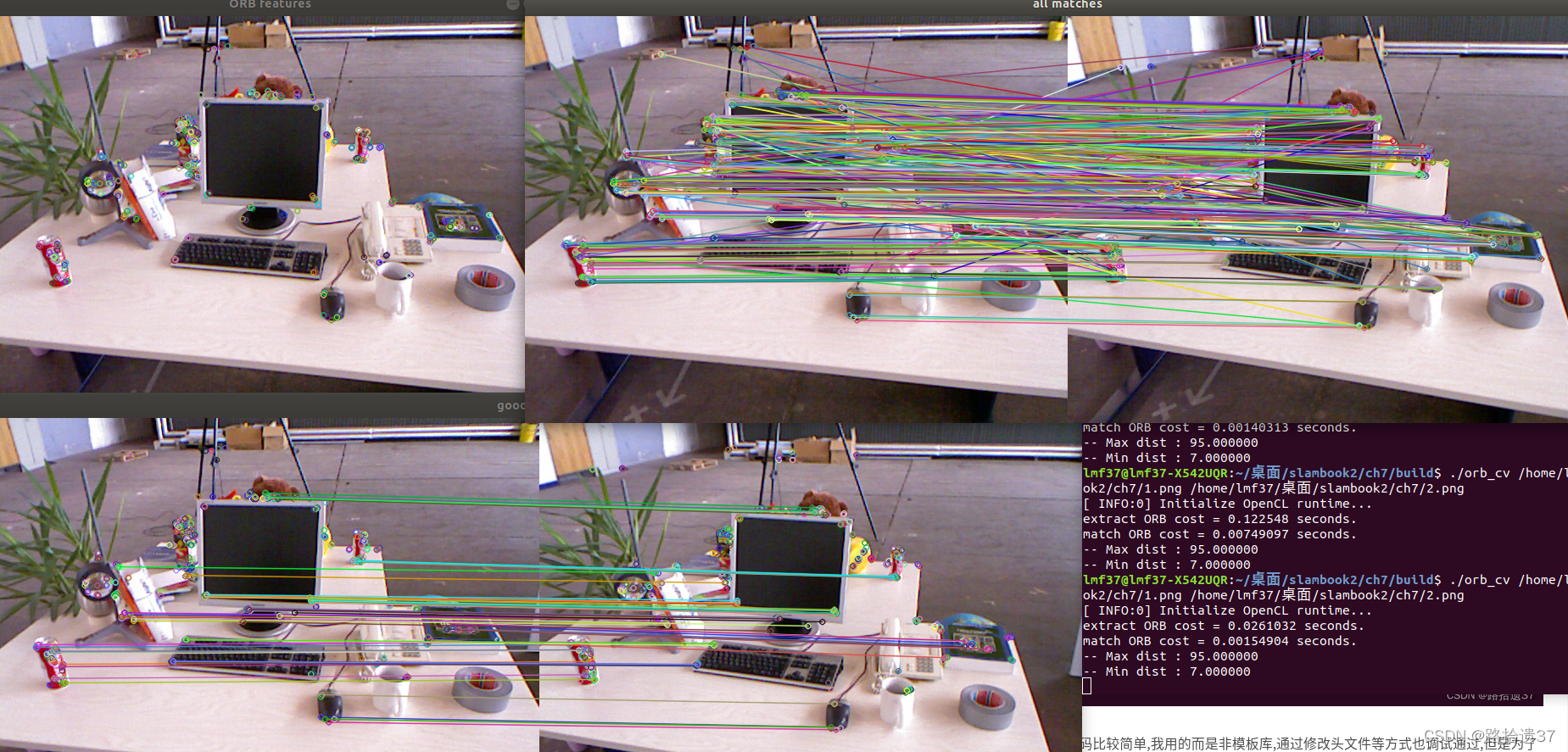 通过KDevelop调试
通过KDevelop调试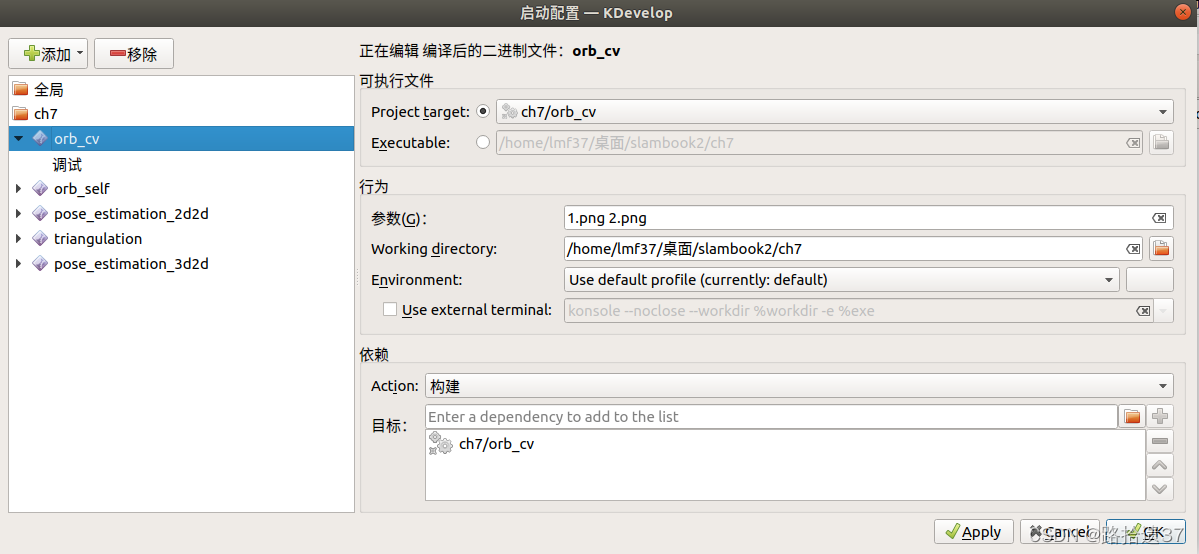
 结果:
结果:
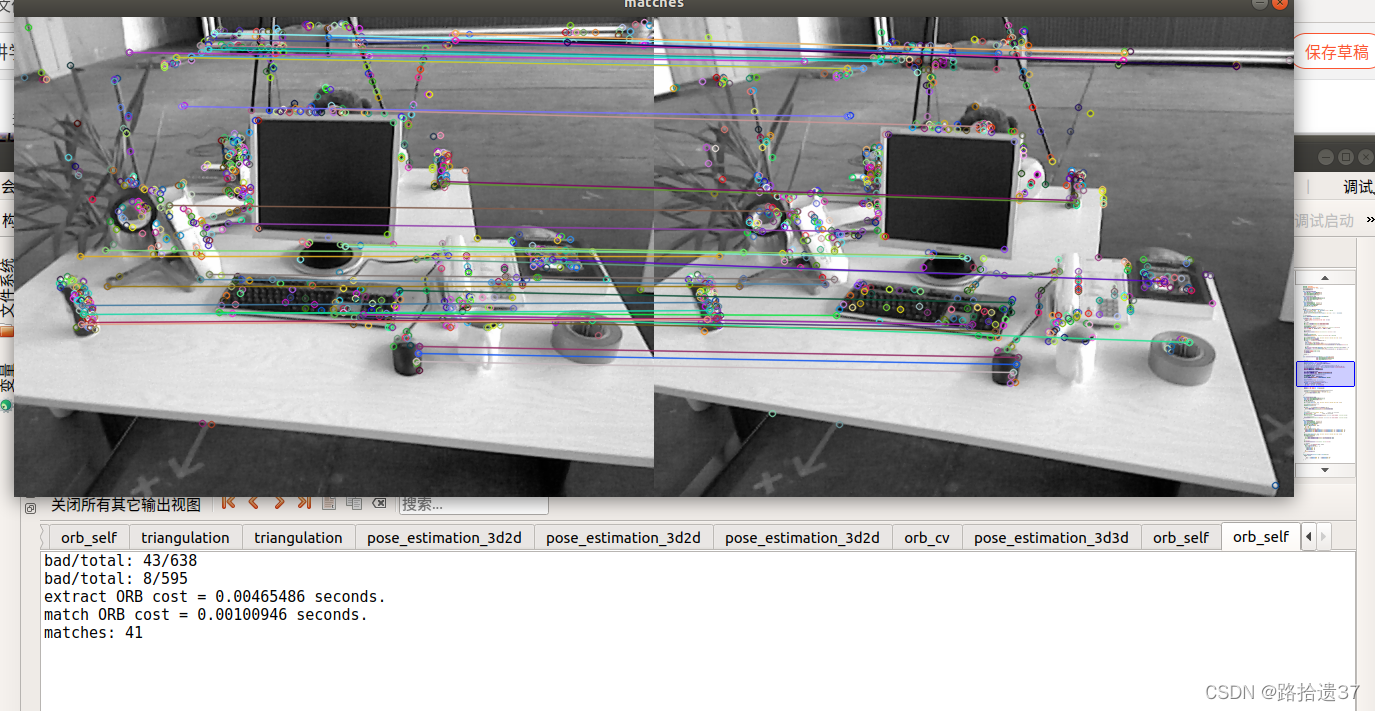 代码及注释如下:
代码及注释如下: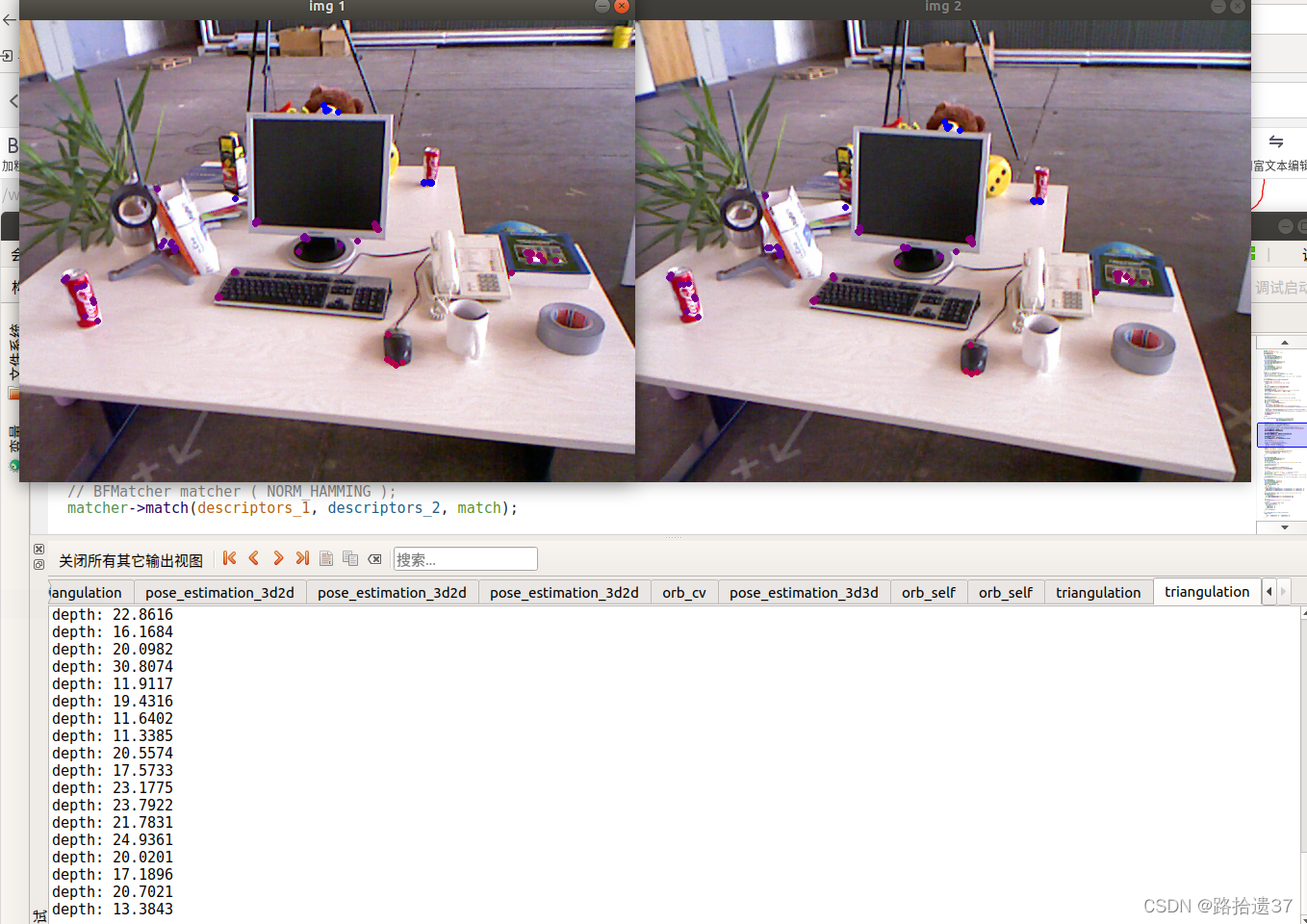 代码及注释如下: (
代码及注释如下: (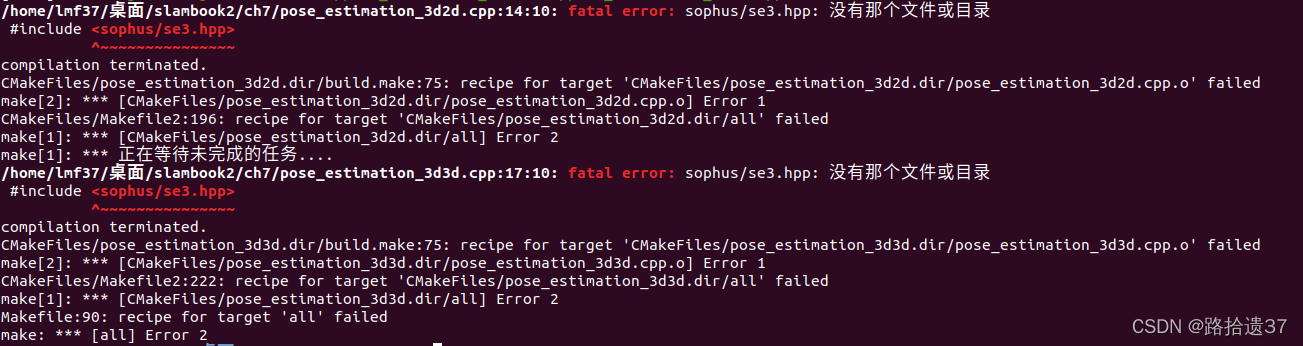
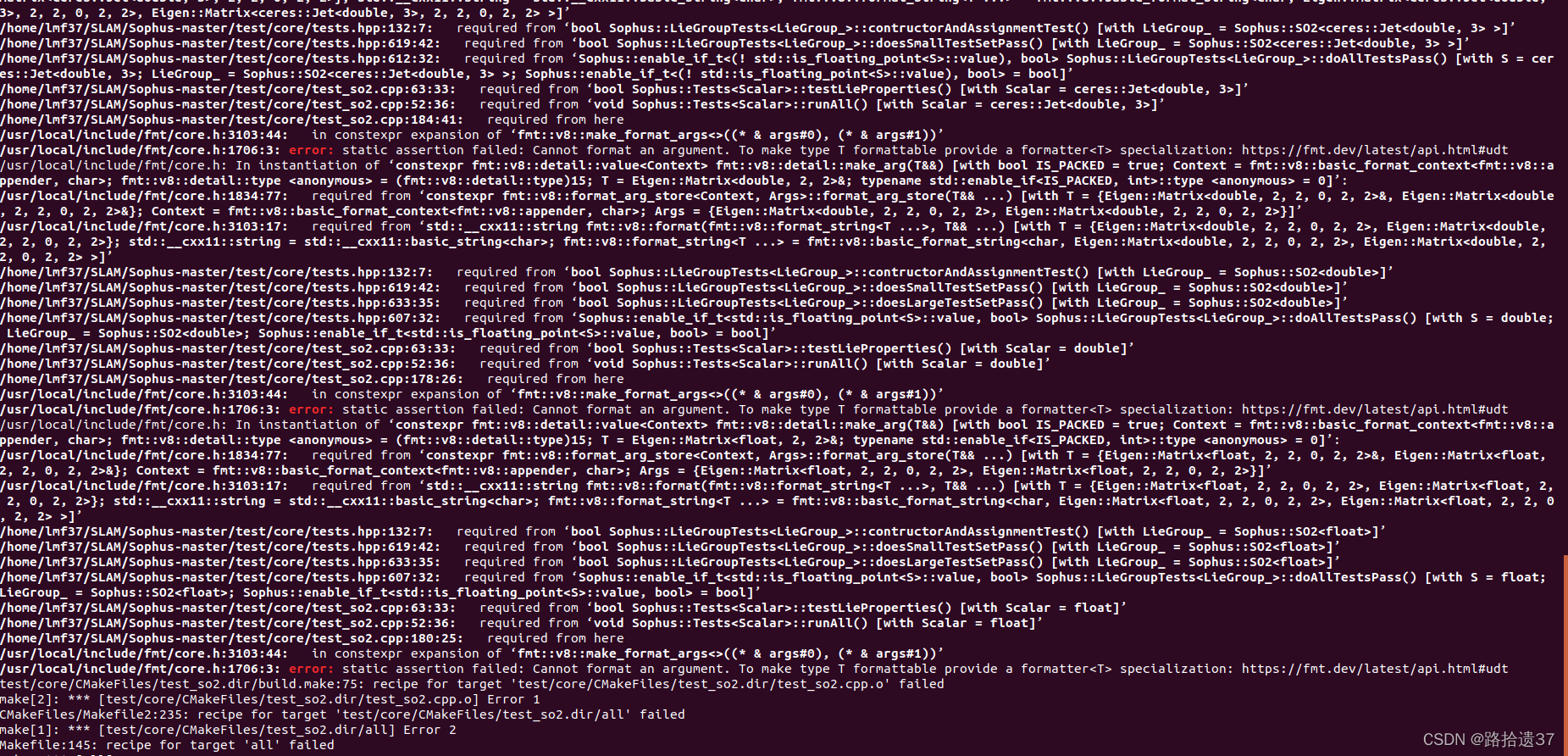




评论(1)
您还未登录,请登录后发表或查看评论