
一直想找一款机器人硬件学习学习,在某宝上看了一大圈,一直不知道该如何下手,凑巧在朋友圈看到了古月居发布的OriginBot机器人,丰富的图文和课程让我心动也行动了。
在古月学院下单后,真是翘首以待啊,虽然套件还没到,但是OriginBot群里可真是热闹,先看看各位大佬发言也是好的。终于在第五天收到了快递送货的信息。收到货之后,迫不及待开箱一波,包装扎实,先点一个赞。

收到的OriginBot是散件,里边有说明书,虽然里边有彩色的安装指引,不过总感觉不太直观,还是跟着网站上的实物组装更友好:
https://www.originbot.org/guide/hardware_setup/

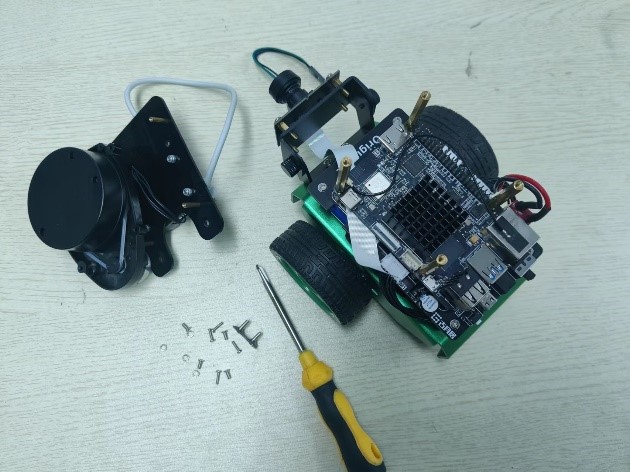
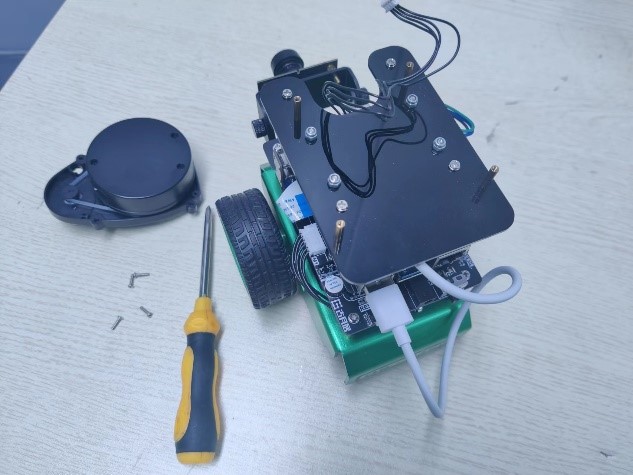
第一次组装机器人,过程可谓跌宕起伏,安装控制器板卡时,没注意方向,安装好旭日派之后,才发现,只能拆了重新来。安装雷达时,螺丝比较小,需要特别注意,一不小心螺丝就飞走了。
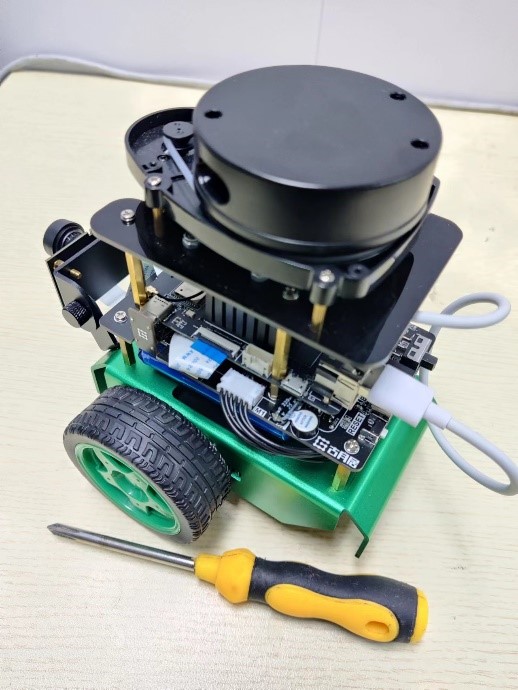
前后折腾了一个多小时,终于把小车给拼起来了,虽然还没动起来,不过感觉还是达成了第一个小目标。

下一个小目标,把小车动起来。这一步可比组装机器人难多了,主要流程我是跟着这个页面操作的:https://www.originbot.org/guide/quick_guide/
- (1)先来烧写SD卡的镜像和控制器的固件
因为之前有玩过树莓派,对SD卡烧写还比较熟悉,直接在这个网站里下载好镜像,参考里边的烧写步骤就可以完成:https://www.originbot.org/guide/image_install/
网页里有古月老师录制的视频,参考着一起操作,顺利完成镜像的烧写,和旭日派网络和空间的配置。这个过程看到群里很多小伙伴不太熟悉串口和SSH的配置,好在我自己之前折腾过树莓派,并没有遇到什么问题,大家如果之前没用过的话,可以先百度搜索下树莓派上相关的配置,其实都大同小异。
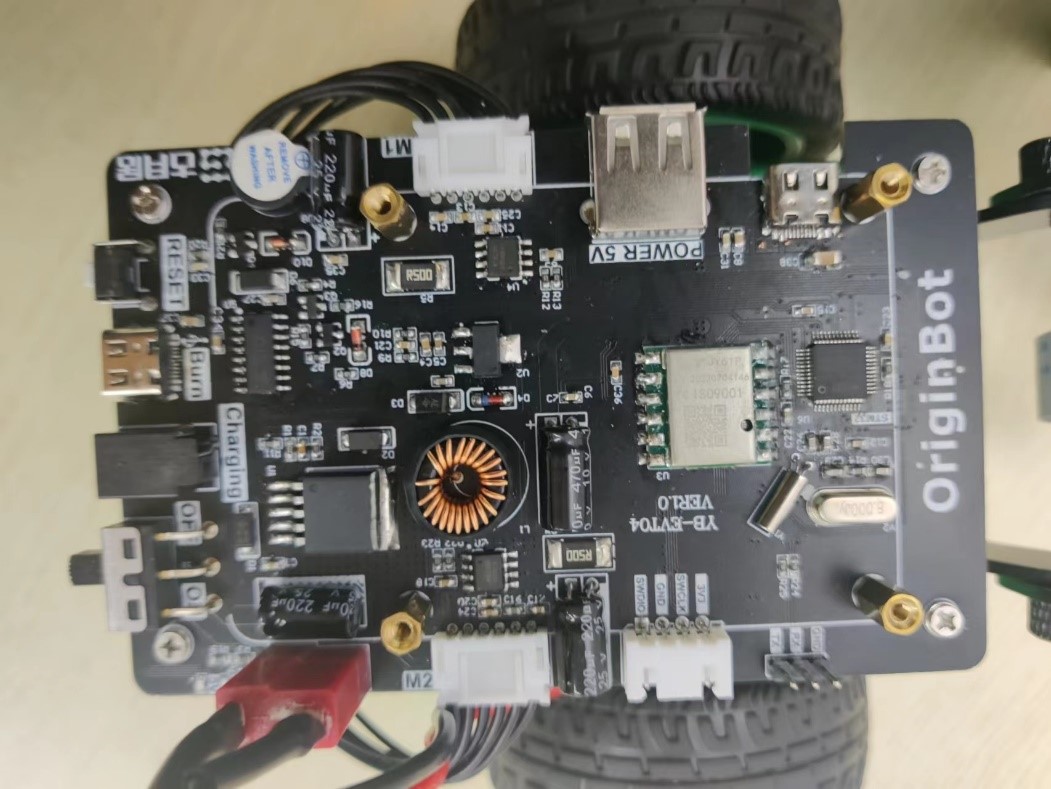
旭日派镜像烧写之后,一定要记得烧写控制器的固件,就是旭日派下边那块印着“OriginBot”字样的板卡,不然之后的小车会跑飞(不要问我为啥知道)。
- (2)然后要安装Ubuntu和ROS2系统
小车端的环境配置好之后,就要配置电脑上的环境了,需要安装虚拟机+Ubuntu+ROS2了,这里我使用的是Ubuntu22.04,相关的安装方法网上有不少资料,我主要参考的是古月老师《ROS2入门21讲》的视频:https://www.bilibili.com/video/BV16B4y1Q7jQ?p=3
- (3)编译OriginBot的功能包
OriginBot有一个电脑端的代码仓库,叫做originbot_desktop,看了下主要是之后电脑端显示环境和仿真环境相关的功能,暂时好像还用不到,我就先跳过了。
- (4)把小车跑起来
只要前边SD卡镜像和控制器固件烧写好之后,其实就可以控制小车运动了,因为在小车的系统中,已经都安装好了ubuntu和ros2环境了,参考这个页面的说明,终于可以把小车动起来了:
https://www.originbot.org/guide/easy_start/
先来了一波速度与激情。
originbot.org网站里的内容还有很多,不过都需要使用ROS2,这个我还没怎么用过,还是决定先去刷完《ROS2入门21讲》和《从零开发智能小车》的视频,再继续后边的学习。
总之,OriginBot是一款很适合初学者学习机器人的小车,功能非常丰富,还有很多参考资料和视频课程,微信群里边还有一群志同道合的小伙伴,古月老师偶尔也现身答疑,希望可以和大家一起学习,一起进步。

评论(1)
您还未登录,请登录后发表或查看评论