

对载体准确的姿态估计是实现高精度导航的前提条件。在消费级产品的导航方案中,无人机需要准确确定当前点头角与侧滚角,进而控制系统实现姿态自稳,是无人机安全行驶至关重要的条件;在高精度导航方案中,惯导系统需在静止状态下需经几分钟至几十分钟的初始对准,该过程就是计算IMU当前的姿态角(也叫作失准角),在长时间对准过程中,Kalman滤波器逐渐达到收敛状态。
在GNSS不参与的姿态估计时,更多依赖于IMU的自修正,主要有三种模式:
① 加速度计的重力加速度分量,用于修正IMU的点头和侧滚方向角度;
② 磁力计感受到的地球磁场方向,用于修正摇头角;
③ 高精度陀螺仪能够测量地球自转的前提下,可以用于摇头角度的初始对准;
其中①和②常见于低精度的导航方案,③见于高精度惯性导航方案,要求陀螺仪的精度高于地球自转角速度(地球自转:15°/h),②不适用于高精度导航方案,因为磁场较为容易受到外界环境的干扰,观测得到的摇头角的精度往往低于陀螺仪的理论精度。不失一般性,下面的内容仅讨论①。
1. 姿态确定方法
姿态估计常采用”error-state EKF“框架,相比于传统的EKF而言,用error state 可降低非线性系统在线性化过程中的误差,是惯性导航中最为常见的方案,其核心思想是用姿态误差的协方差矩阵来描述系统的不确定度。(参考文献:Quaternion kinematics for the error-state KF)(描述不一定准确)在详细设计导航方案时,总结有下面5个步骤:
① 确定待估计的状态量和误差状态量,确定状态更新方程;
② 根据状态更新方程,推导出误差传播方程,并得到kalman滤波的转移矩阵(离散更新方程对误差状态的雅克比矩阵)和协方差更新方程,是其中的核心;
③ 确定多传感器融合的观测模型,并对观测模型推导出残差相对于误差状态的雅克比矩阵;
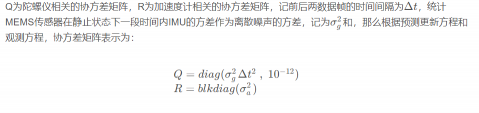
④ 根据各传感器的误差大小,确定协方差矩阵Q(预测更新矩阵)和R(观测矩阵)
⑤ 确定kalman滤波的更新方程;
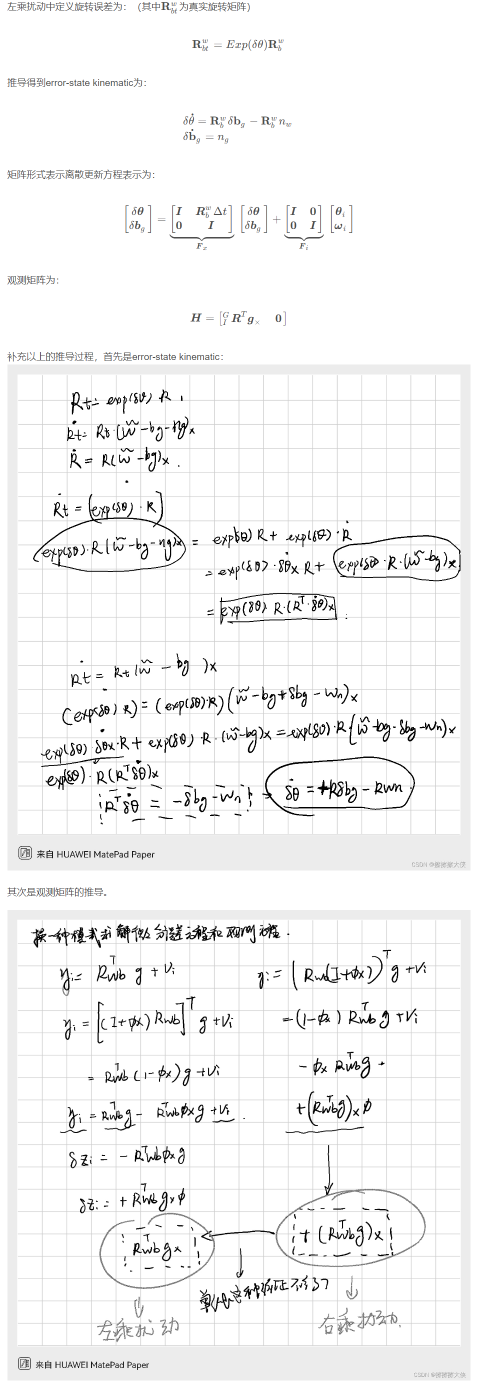
状态量就是IMU本体坐标系到导航坐标系下的旋转矩阵(姿态角)和陀螺仪的bias,表示为
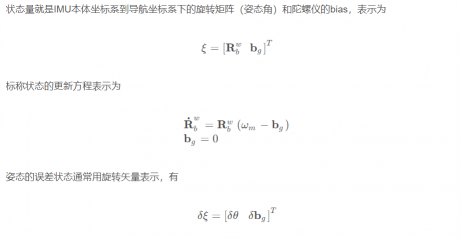
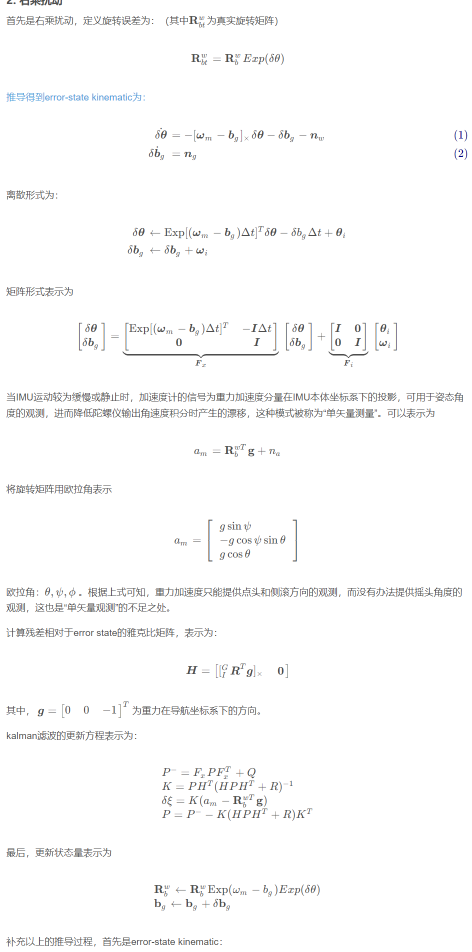
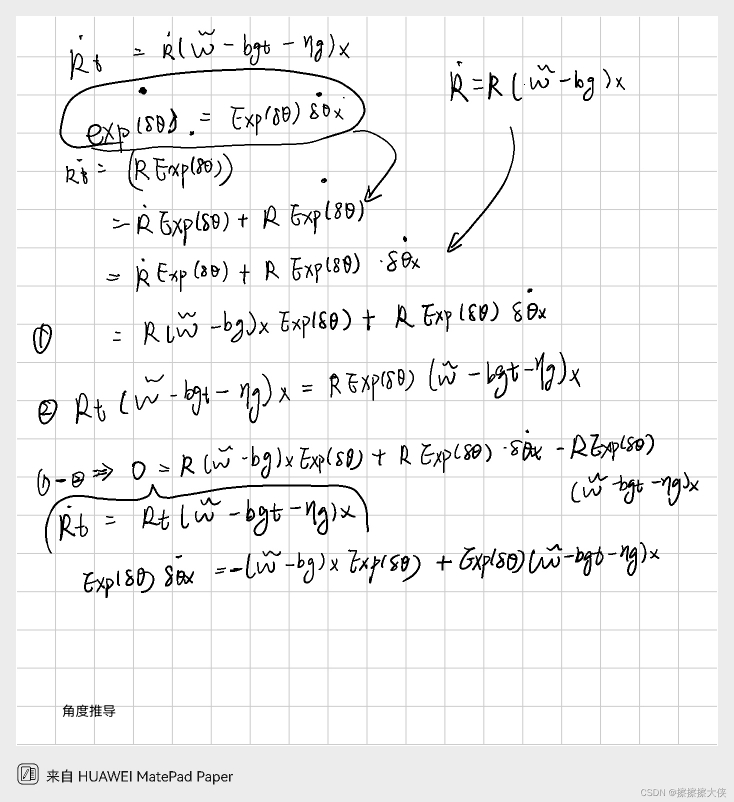
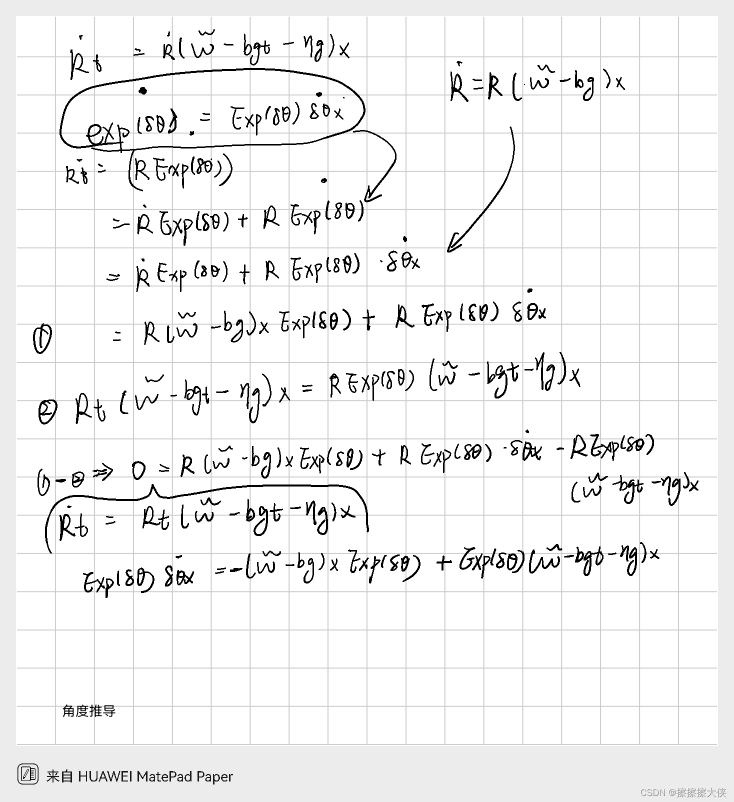
2. 右乘扰动
3. 左乘扰动
4. 调参Q,R矩阵
5. 试验结果对比
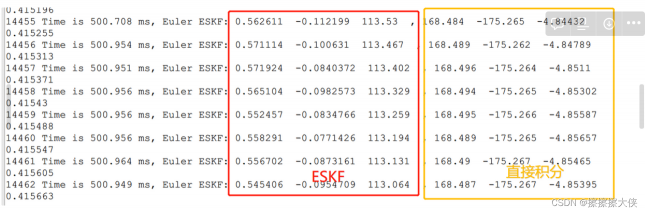
试验采用经典的高精度MEMS传感器STIM300型号IMU,陀螺仪的零偏稳定性指标为1°/h,加速度计的零偏为1mg,通过RS422传输数据至ARM计算平台,输出帧率为1000Hz,加速度计数据作101个点矩形窗的平滑,每20ms作一次滤波更新。
IMU的初始欧拉角度为0,0,0,IMU中途经过多次摆动和振动操作,历经2个小时之后,对比如下图所示,由于直接积分用旋转矢量泰勒展开近似的模式进行计算,发现仍存在较为明显的误差,实际情况下,STIM300的漂移程度应远低于图中所呈现的那样。ESKF(采用左乘扰动的模式)在点头、侧滚角上表现较好,摇头角表现较差。摇头角的漂移程度大于直接积分的方式,这是因为单矢量观测过程中可能对摇头角进行错误的观测修正。
而右乘扰动的模式中,摇头角度的漂移更大,甚至到2-3s漂移到1°,在对航向角度缺乏有效观测的条件下,摇头角的漂移程度让人吃惊。

左乘扰动
右乘扰动
6. 原因分析
对于为什么左乘扰动中摇头角漂移更小,这是因为将误差状态 δ θ \delta \bm \theta δθ由本体坐标系改为定义在惯性坐标系。而**王炜鑫**博士认为将姿态误差定义到惯性坐标系后,线性化的不精确就不会对不可观测的自由度做出错误的修正,详细内容可以参考他的博客。因此在高精度的惯性导航中,常采用左乘扰动的方式进行误差传播方程的推导,在精度要求不太高的场景中,相关论文中也有对右乘扰动模型的使用。



评论(0)
您还未登录,请登录后发表或查看评论