

ROS机器人操作系统——ROS的核心概念(二)
ROS机器人操作系统
文章目录
前言
一、ROS的通信机制
二、ROS中的开发工具
1.命令行&编辑器
2.可视化工具
三、ROS的应用功能
四、ROS的生态系统
总结
前言
ROS的核心就是提高机器人研发中的软件复用率,共分为四大部分。
一、ROS的通信机制
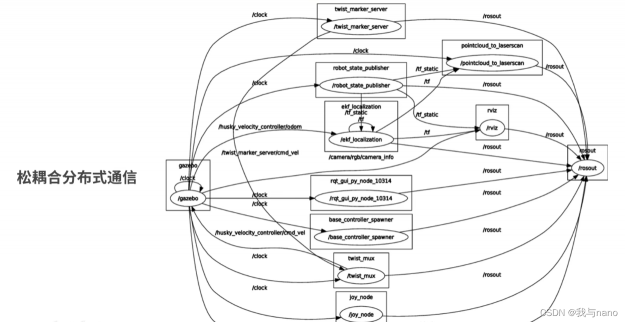
松耦合分布式通信,所有的框架可以抽象成一个节点图,用箭头代表他们之间的通信。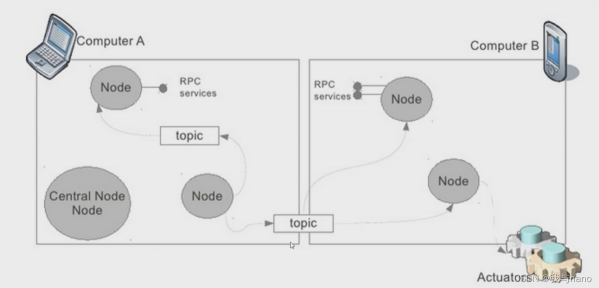
节点是ROS中重要的一部分,通过各个节点实现功能的拼接,节点是唯一的,不允许重名
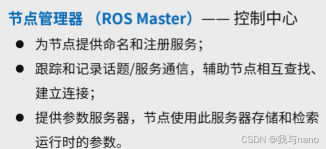
节点之间通过节点管理器进行连接

像图像、雷达等都是ROS中定义好的接口。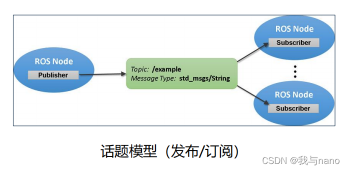
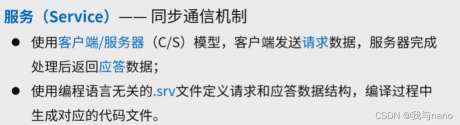
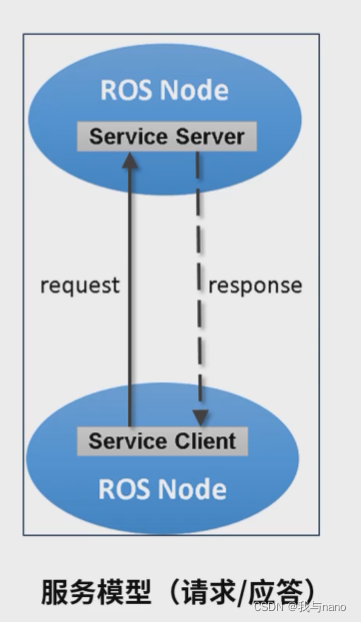
使用异步通信时常常会出现接收不到消息的情况,ROS提供了同步通信机制,话题是单向传输,服务是双向传输。服务通常都是请求一次调用一次。
二、ROS中的开发工具

1.命令行&编辑器
通过终端调试机器人
2.可视化工具
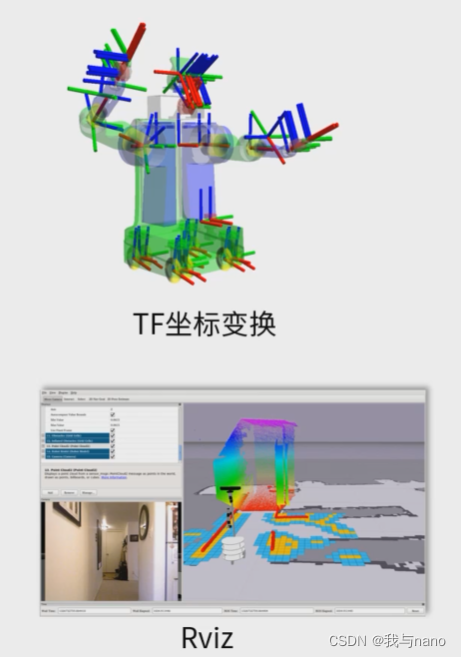
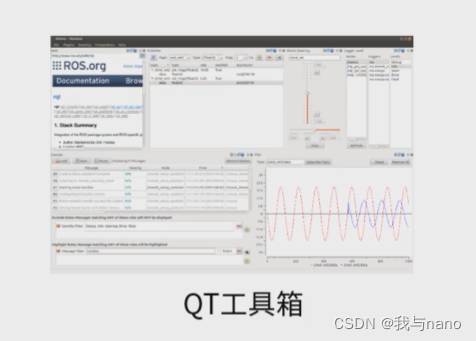

通过这些工具将信息可视化。
三、ROS的应用功能
Navigation导航:
SLAM建图: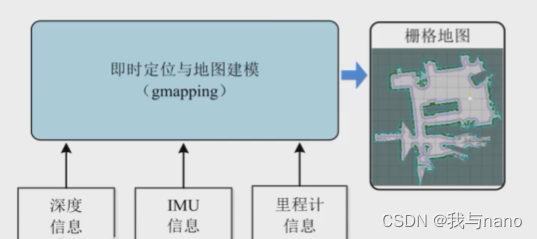
Movelt机械臂动作规划:
通过拼接各种接口,将数据流出后,实现这些功能。
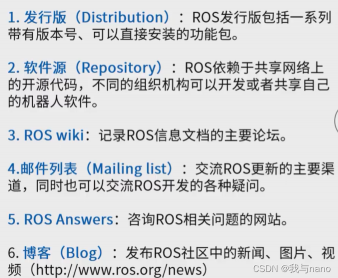
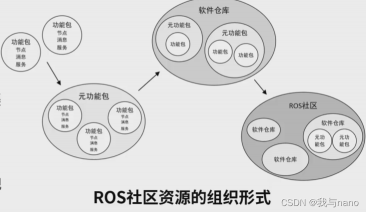
四、ROS的生态系统
总结
ROS进几年的发展过程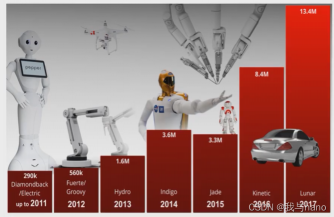

评论(0)
您还未登录,请登录后发表或查看评论